Изобретение относится к сварке, в частности к быстродействующим электродинамическим приводам давления сварочных электродов машин для контактной сварки.
Известны механизмы сжатия контактных машин для точечной и рельефной сварки, оснащенные педальными, электромеханическими , пневматическими, пневмогидрав.лическими, гидравличес.кими приводами .ЗВеличина создаваемых такими механизмами усилий не учитывает изменяющихся условий сварки, часто зависит от толщины пакета свариваемых деталей.
Наиболее близким к предлагаемому мому результату является механизм сжатия контактных машин, содержащий пневматический привод предварительного сжатия, на штоке которого установлен электрододержатель и электродинамический привод окончательного сжатия, выполненный в виде двух взаимодействующих проводников, соединенных, шинами с источником питания 2.
Недостатком механизма является то, что в этом электродинамическом приводе окончательного сжатия проис ходит резкое движение свободно установленного проводника с грузсм под действием электродинамической силы, возникающейпри прохождении через проводники импульса тока. При этом на соединительные шины действуют динамические усилия,, приводящие к частому их обрыву.
Цель изобретения - повышение надежности механизма сжатия путем ;пре10дотвращения обрыва шин.
Указанная цель достигается тем, что в механизме, содержащем пневматический привод предварительного сжатия, на штоке которого установлен
15 электрододержатель и электродинамический привод окончательного сжатия, выполненный в виде двух взаимодействующих проводников, соединенных .шйнами с источником питания, один из
20 проводников выполнен в виде спирали, жестко соединен со штоком и подключен к источнику питания, а другой выполнен в виде электропроводног-о диска, подпружиненного к первому
25 проводнику.
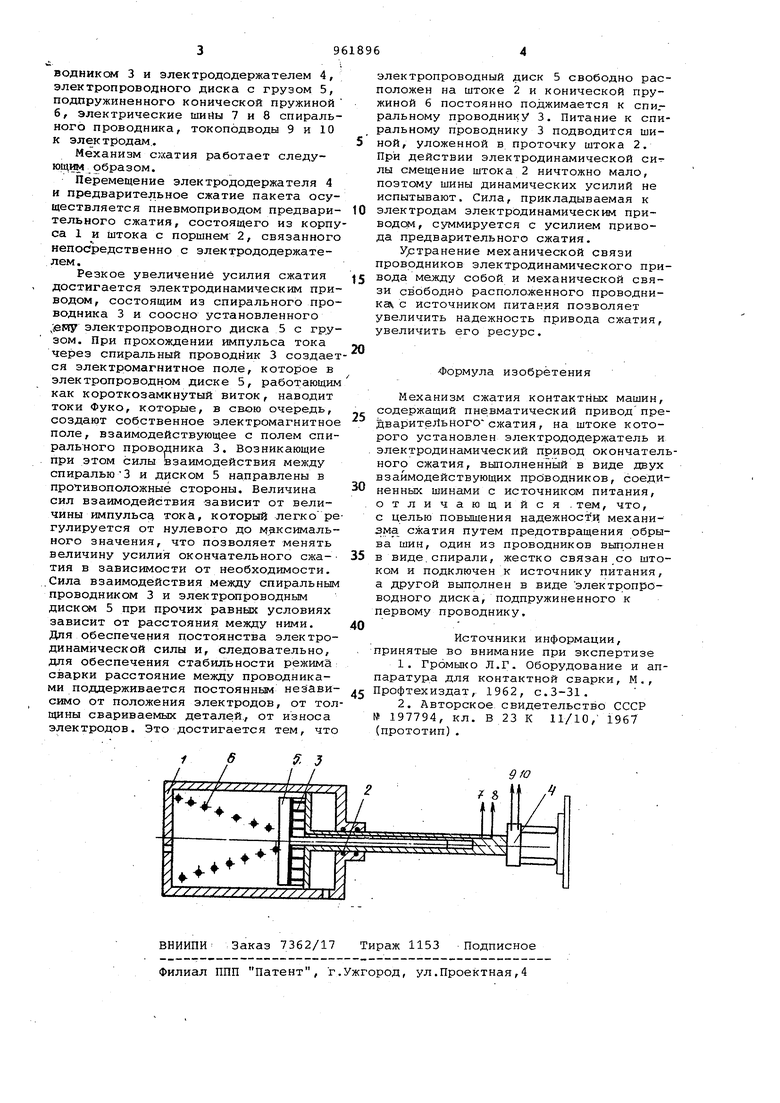
На чертеже показан механизм сжатия контактных машин, общий вид.
Механизм сжатия состоит из корпуса 1 пневмопривода, штока 2 с жестко
30 закрепленным на нем спиральным проводником 3 и электродадержателем 4, электропроводного диска с грузом 5, подпружиненного конической пружиной б, электрические шийы 7 и 8 спирального проводника, токоподводы 9 и 10 к элек тродам.. Механизм сиатия работает следующим образом. Перемещение электрододержателя 4 и предварительное сжатие пакета осуществляется пневмоприводом предварительного сжатия, состоящего из корпу са 1 и штока с поршнем 2, связанного непосредственно с электрододержатеРезкое увеличение усилия сжатия достигается электродинамическим приводом, состоящим из спирального проводника 3 и соосно установленного ;ему электропроводного диска 5 с грузом. При прохождении импульса тока через спиральный проводник 3 создает ся электромагнитное поле, которое в электропроводном диске 5, работающим как короткозамкнутый виток, наводит токи Фуко, которые, в свою очередь, создают собственное электромагнитное поле, взаимодействующее с полем спирального проводника 3. Возникающие при этом силы взаимодействия между спиралью3 и диском 5 направлены в противоположные стороны. Величина сил взаимодействия зависит от величины импульсд тока, который легко ре гулируется от нулевого до м ксималь ного значения, что позволяет менять величину усилия окончательного ежатин в зависимости от необходимости. Сила взаимодействия между спиральны проводником 3 и электропроводным диском 5 при прочих равных условиях зависит от расстояния между ними, обеспечения постоянства электро динамической силы и, следовательно, для обеспечения стабшхьности режима сварки расстояние между проводниками поддерживается постоянным незави симо от положения электродов, от то щины свариваемых деталей., от износа электродов. Это достигается тем, чт лектропроводный диск 5 свободно расоложен на штоке 2 и конической пруиной б постоянно поджимается к спиальному проводнику 3. Питание к спиальному проводнику 3 подводится шиной, уложенной в проточку штока 2. При действии электродинамической си лы смещение штока 2 ничтожно мало, поэтому шины динамических усилий не испытывают. Сила, прикладываемая к электродам электродинамическим приводом, суммируется с усилием привода предварительного сжатия. Устранение механической связи проводников электродинамического привода между собой и механической связи свободно расположенного проводниKSk, с источником питания позволяет увеличить надежность привода сжатия, увеличить его ресурс. Формула изобретения Механизм сжатия контактных машин, содержащий пне.вматический привод предваритеЛьного-сжатия, на штоке которого установлен электрододержатель и электродинамический привод окончательного сжатия, выполненный в виде двух взаимодействующих проводников, соединенных шинами с источником питания, отличающийся .тем, что, с целью повышения надежности механи.зма сжатия путем предотвращения обрывашин, один из проводников выполнен в виде,спирали, жестко связан .со штоком и подключен к источнику питания, а другой выполнен в виде электропроводного диска, подпружиненного к первому проводнику. Источники информации, принятые во внимание при экспертизе 1.Громыко Л.Г. Оборудование и аппаратура для контактной сварки, М,, Профтехиздат, 1962, с.3-31. 2.Авторское свидетельство СССР № 197794, кл. В 23 К 11/10, 1967 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм сжатия контактных машин | 1982 |
|
SU1026989A1 |
| Л ПДТЕНТпО- | 1967 |
|
SU197794A1 |
| Устройство для обвязки изделий металлической лентой | 1977 |
|
SU745780A1 |
| Механизм сжатия машины для контактной сварки | 1985 |
|
SU1260149A2 |
| Способ и устройство защиты от коррозионного растрескивания сварной металлоконструкции | 2015 |
|
RU2626705C2 |
| Устройство для подачи деталей | 1985 |
|
SU1299739A1 |
| Устройство для электроэрозионного легирования | 1991 |
|
SU1821300A1 |
| Механизм сжатия машины для контактной точечной сварки | 1984 |
|
SU1235687A1 |
| Устройство для контактной точечной сварки | 1987 |
|
SU1447651A1 |
| Пистолет для контактной точечной сварки | 1972 |
|
SU585007A1 |
