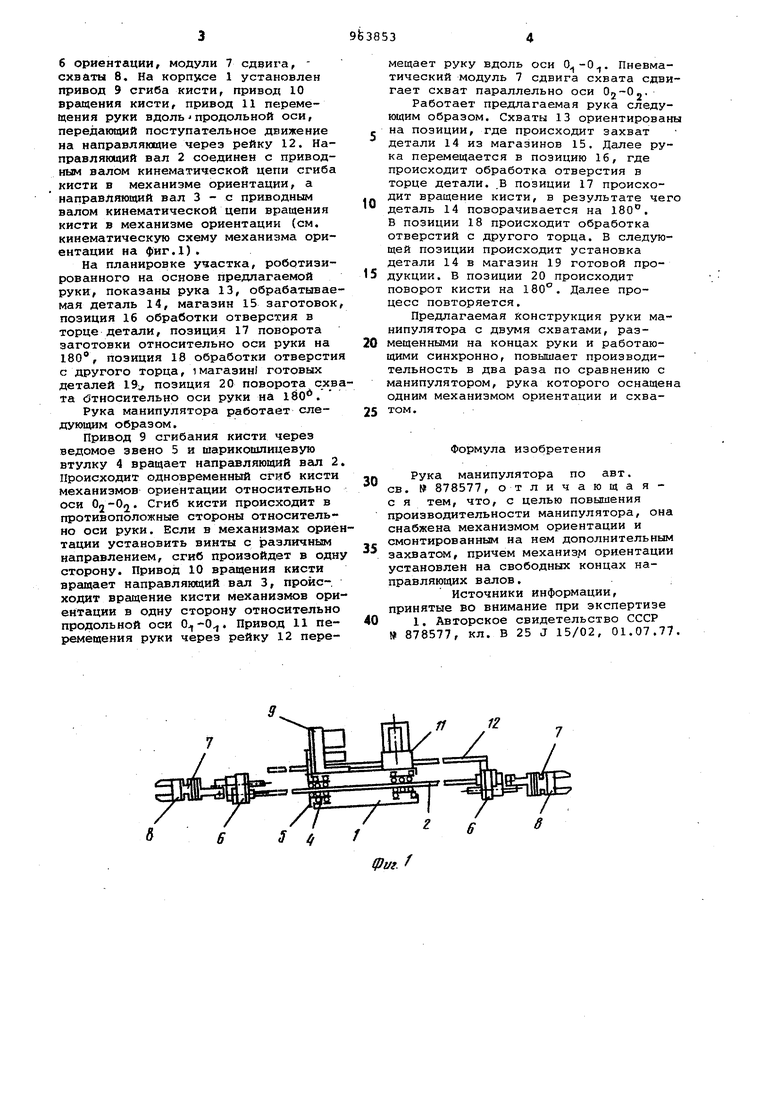
6 ориентации, модули 7 сдвига, схваты 8. На корпусе 1 установлен привод 9 сгиба кисти, привод 10 вращения кисти, привод 11 neipeMeщения руки вдольпродольной оси, передающий поступательное движение на направляющие через рейку 12. Направляющий вал 2 соединен с приводным валом кинематической цепи сгиба кисти в механизме ориентации, а направляющий вал 3-е приводным валом кинематической цепи вращения кисти в механизме ориентации (см. кинематическую схему механизма ориентации на фиг.1).
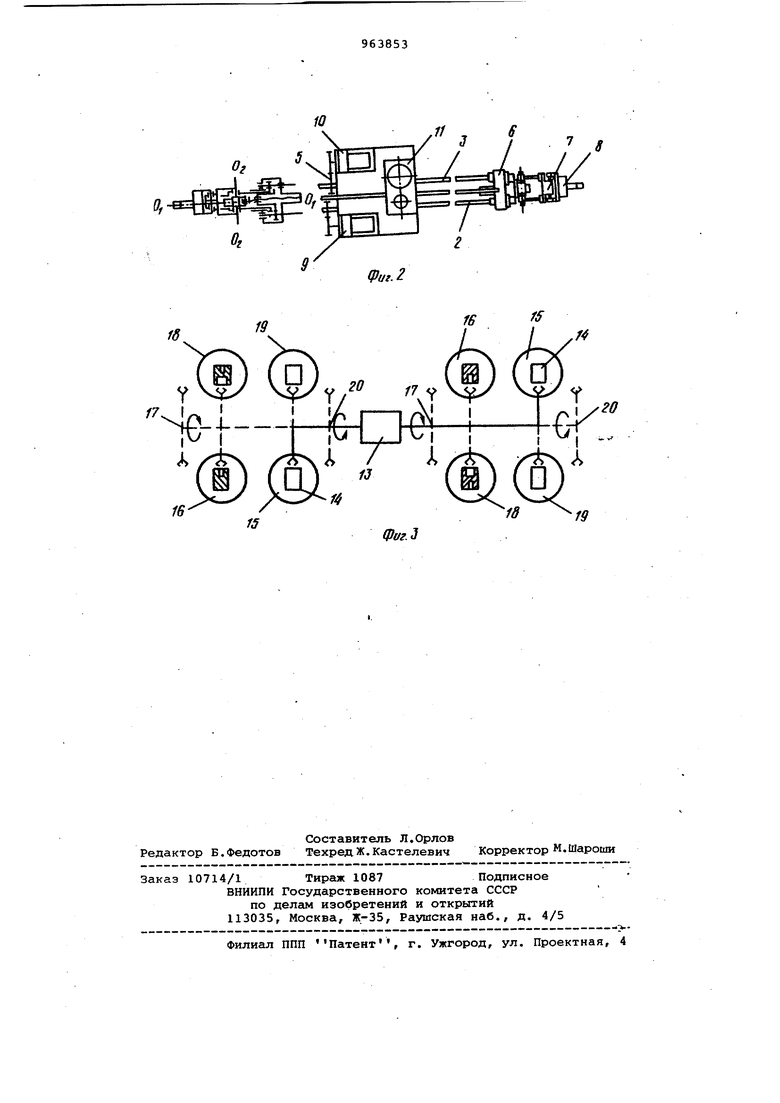
На планировке участка, роботизированного на основе предлагг емой руки, показаны рука 13, обрабатываемая деталь 14, магазин 15 заготовок, позиция 16 обработки отверстия в торце деташи, позиция 17 поворота заготовки относительно оси руки на 180, позиция 18 обработки отверстия с другого торца, iмагазин готовых деталей 19;, позиция 20 поворота схвата бтносительно оси руки на 180.
Рука манипулятора работает следующим образом.
Привод 9 сгибания кисти через ведомое звено 5 и шарикошлицевую втулку 4 вращает направляющий вгш 2. Происходит одновременный сгиб кисти механизмов ориентации относительно оси 02-02. Сгиб кисти происходит в противоположные стороны относительно оси руки. Если в механизмах ориентации установить винты с различным направлением, сгиб произойдет в одну сторону. Привод 10 вращения кисти вращает направляющий вал 3, происходит вращение кисти механизмов ориентации в одну сторону относительно продольной оси Oj,-0. Привод 11 перемещения руки через рейку 12 перемещает руку вдоль оси . Пневматический модуль 7 сдвига схвата сдвигает схват параллельно оси О,-О,Работает предлагаемая рука следующим образом. Схваты 13 ориентирован на позиции, где происходит захват детали 14 из магазинов 15. Далее рука перемещается в позицию 16, где происходит обработка отверстия в торце детали. .В позиции 17 происходит вращение кисти, в результате чег деталь 14 поворачивается на 180°. В позиции 18 происходит обработка отверстий с другого торца. В следующей позиции происходит установка детали 14 в магазин 19 готовой продукции. В позиции 20 происходит поворот кисти на 180°. Далее процесс повторяется.
Предлагаемая конструкция руки манипулятора с двумя схватами, размещенными на концах руки и работающими синхронно, повышает производительность в два раза по сравнению с манипулятором, рука которого оснащен одним механизмом ориентации и охватом .
Формула изобретения
Рука манипулятора по авт. св. 878577, от личающаяс я тем, что, с целью повышения производительности манипулятора, она снабжена механизмом ориентации и смонтированным на нем дополнительным захватом, причем механизм ориентации установлен на свободных концах направляющих валов.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 878577, кл. В 25 J 15/02, 01.07.77,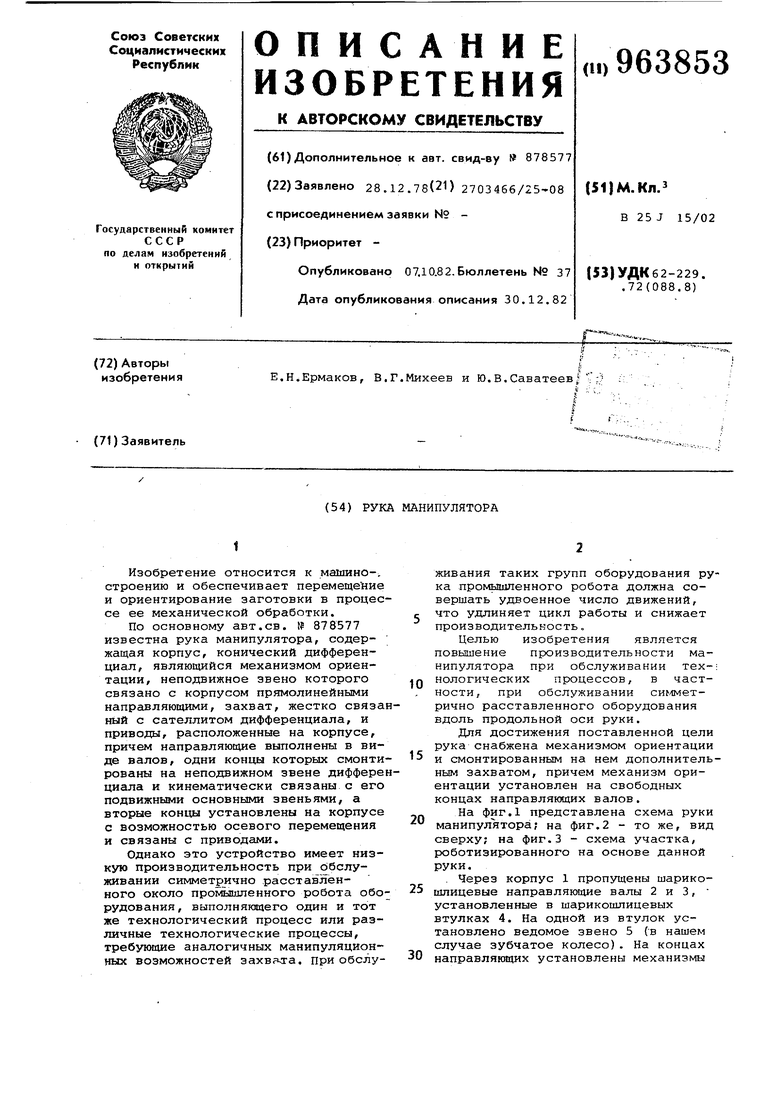
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Манипулятор | 1981 |
|
SU971644A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
Si, 1
Л 12.
фиг. f
Фаг.З
