(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1975 |
|
SU550280A2 |
| Захват | 1972 |
|
SU440249A1 |
| Захват | 1976 |
|
SU558789A1 |
| Захват | 1975 |
|
SU662345A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захват манипулятора | 1978 |
|
SU810476A1 |
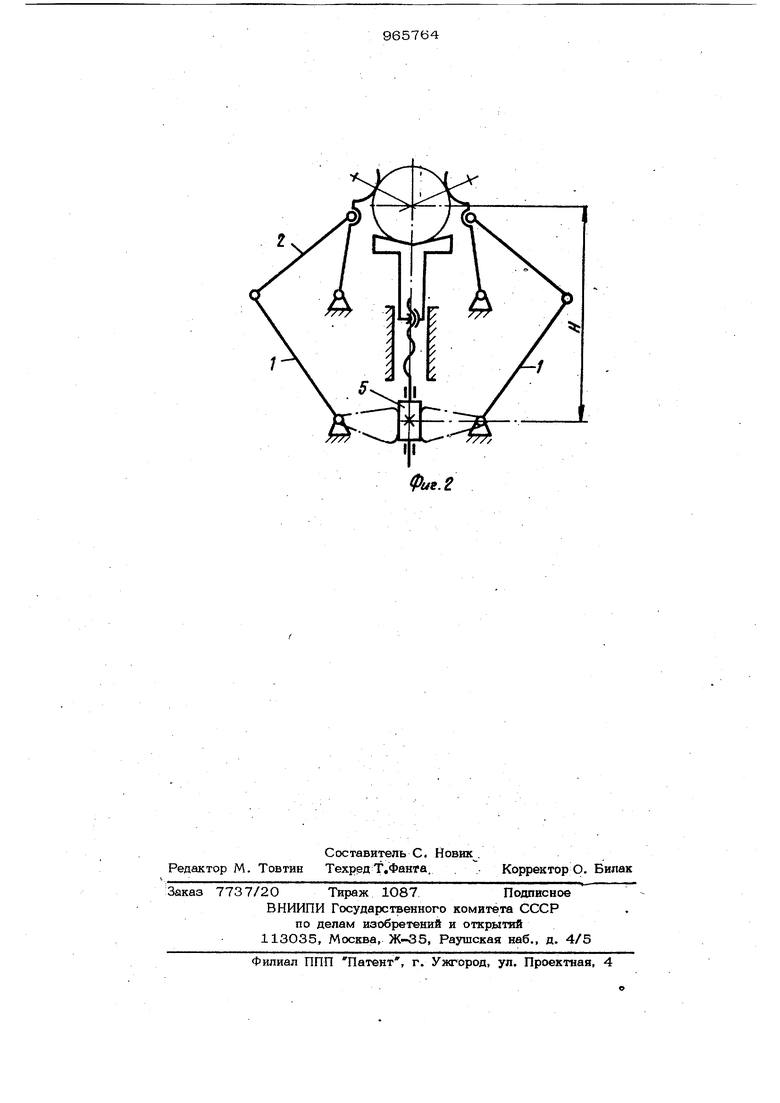
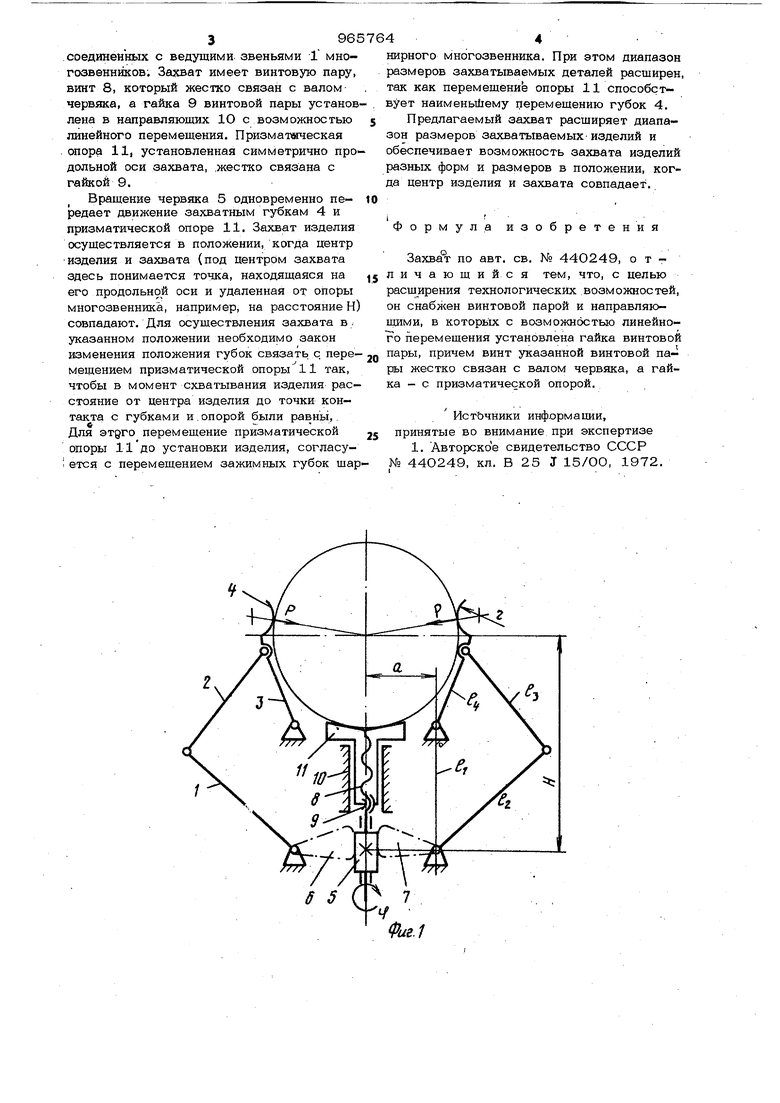
Изобретение относится к захватным ус ройствам промышленных роботов и .может применяться в различных, технологических процессах, где требуется точное мани- пулирование объектом. По основному авт. св. Nfc 440249 известен захват, содержащий стационарно установленную призматическую опору, расположенную симметрично продольной оси. корпуса, и зажимные губки, соединенные с корпусом посредством шарнирных многозвенников, связанных с общим приводом, причем шарнирные многозвенники выполнены из звеньев разной длины так, что : длина их ведущих звеньев больше длины каждого ведомого, а привод вьшолнен в виде самотормозящейся червячной передачи, червяк которой расположен внутри кор пуса вдоль его продольной оси, а каждый червячный сектор жестко соединен с ведущими звеньями соответствующего много- звенника, при этом губки выполнены сопрягаемыми, каждая в виде цилиндра с прорезями, ось которого совпадает.с осью подвижного шарнира, роединяющего ведомые звенья HIJ Недостатками указанного захв;ата являются ограниченные технологические возможности, так как не обеспечивается регулировка губок схвата. Цель изобретения - расщирение технологических возможностей. Указанная цель достигается тем, что захват снабжен винтовой парой и направляющими, в которых с возможностью линейного перемещения установлена гайка винтовой пары, причем винт указанной винтовой пары жестко связан с валом червяка, а гайка - с призматической опорой. На фиг. 1 показан захват для удержакия изделия максимального радиуса; на })иг. 2 - то же, для удержания изделия минимального радиуса. Захват состоит из симметрично расположенных шарнирных многоавеннгасрв, состоящих из ведущего звена 1, ведомых звеньев 2 и 3, захватных губок 4, червяка 5, зубчатых секторов 6 и 7, жестко соединенных с ведущими звеньями Г многозвеннйков; Захват имеет винтовую пару, винт 8, который жестко связан с валом червяка, а гайка 9 винтовой пары уставов лена в направляющих 10 с возможностью линейного перемещения. Призматическая опора 11, установленная симметрично про дольной оси захвата, .жестко связана с гайкой 9. Вращение червяка 5 одновременно передает движение захватным губкам 4 и призматической опоре 11. Захват изделия осуществляется в положении, когда центр изделия и захвата (под центром захвата здесь понимается точка, находящаяся на его продольной оси и удаленная от опоры многозвенника, например, на расстояние Н) совпадают. Для осуществления захвата в/ указанном положении необходимо закон изменения положения губок связать с. перемещением призматической опоры 11 так, чтобы в момент схватывания изделия расстояние от центра изделия до точки контакта с губками и.опорой были равны. Для этдго перемещение призматической опоры 11 до установки изделия, согласуi ется с перемещением зажимных губок шар нирного многозвенника. При этом диапазон размеров захватываемых деталей расширен, так как перемещение опоры 11 способствует наименьшему перемещению губок 4. Предлагаемый захват расширяет диапазон размеров захватываемых изделий и обеспечивает возможность захвата изделий разных форм и размеров в положении, когда центр изделия и захвата совпадает. Формула изобретения Захва°т по авт. ев, № 440249, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен винтовой парой и направляю1ЦИМИ, в которых с возможностью линейноFo перемещения установлена гайка винтовой ы, причем винт указанной винтовой паа гайжестко связан с валом червяка, - с призматической опорой. Ист Ьчники информации, инятые во внимание при экспертизе 1, Авторское свидетельство СССР 44О249, кл, В 25 J 15/ОО, 1972,
Фие.2
