(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1430257A1 |
| Ориентирующее устройство | 1989 |
|
SU1761437A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Схват манипулятора | 1985 |
|
SU1498608A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Штанговый конвейер | 1982 |
|
SU1121200A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
1
Изобретение относится к автоматизаций технологических процессов в машино строении, приборостроении, преимущесгвенно к автоматизированным сборочным устройствам.
Известен схват манипулятора, содержащий корпус, захватные элементы и считывающее приспособление в виде щупов 1.
Однако известное устройство име низкую производительность.
Цель изобретения состоит в повышении производительности схвата манипулятора путем совмещения ориентации деталей с их переносом на рабочую позицию.
Цель Достигается тем,что схват мани- и пулятора снабжен попой штангой и расположенным в Hejft подпружиненным штоком, установленными в корпусе с возможностью возвратно-поступательного перемещен ния и совместного поворота вокруг оси 20 относитегаьно корпуса, на которых соответственно смонтированы захватные) элементы и щупы, и копирами, ус« гановпенными на корпусе на разных уровг
нях для поворота штанги со штоком например, посредством связанных с ними рычагов, при этом расстояние между копирами равно высоте шупов.
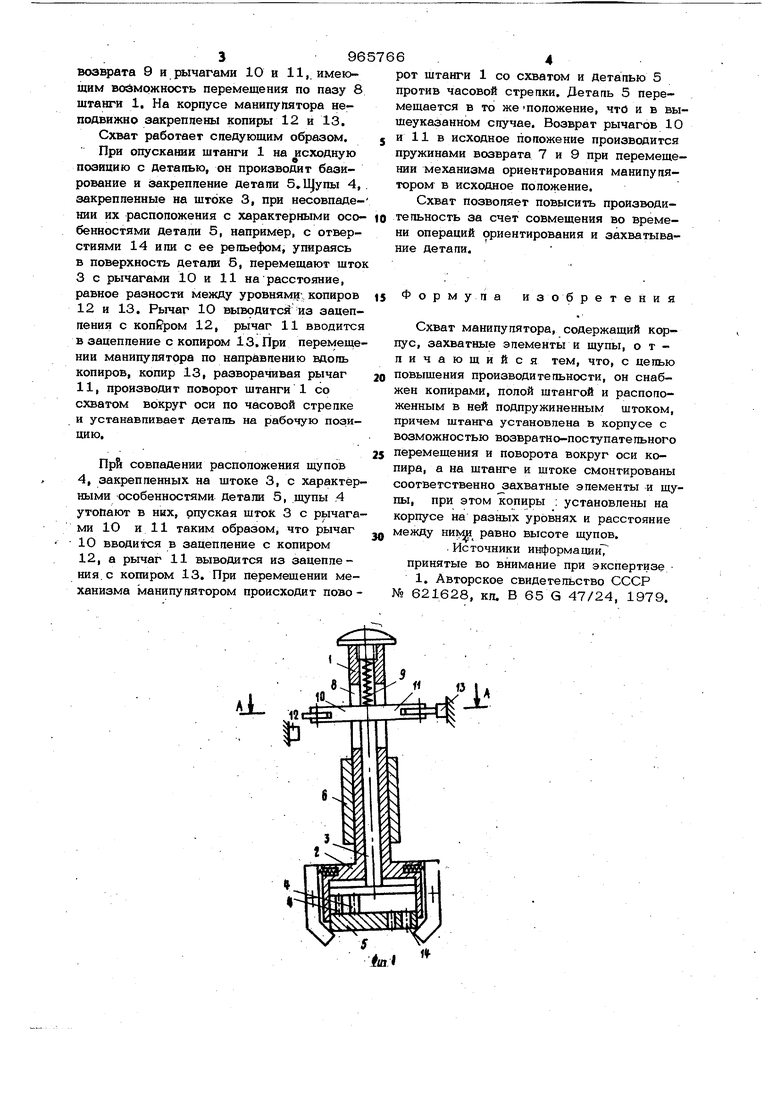
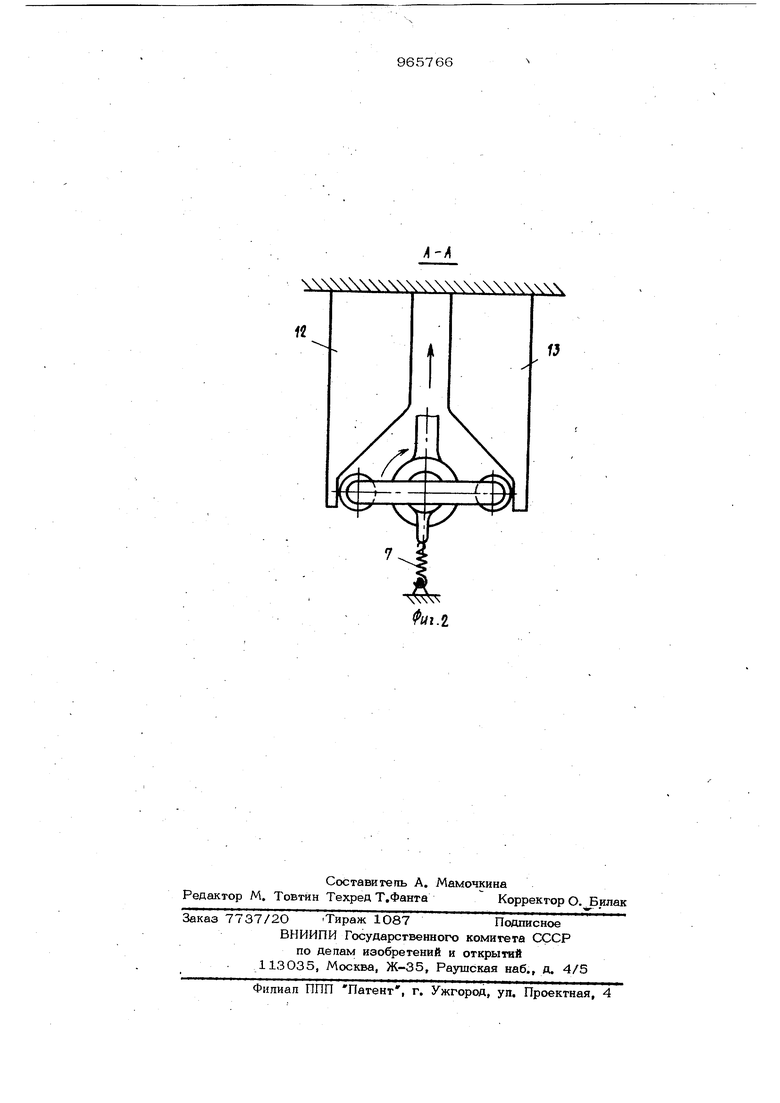
На фиг. 1 изображен схват манипупя тора, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Схват манипулятора состоит из исполнительного органа, выполненнго в виде штанги о1 с расположенными на ней захватными элементами 2, и считывающего механизма, выполненного в виде штока 3 с закрепленными на нем щупами 4, повторяющими характерные особенности ориентируемой детали 5. Штанга расположена в корпусе 6 с возможностью осевого возвратно-поступательного перемещения и поворота вокруг оси корпуса, а также продольного перемещения вместе ,с ним. Корпус 6 крепится к манипулятору (не показан) с возможностью осуществления вышеуказанных перемещений. Штанга 1 снабжена пружиной возврата 7 и пазом 8. Шток 3 снабжен пружиной возврата 9 и рычагами 10 и 11,. имеющим возможность перемещения по пазу 8 щтанги 1, На корпусе манипулятора неподвижно закреплены копиры 12 и 13. Схват работает следующим образом. При опускании щтанги 1 на исходную позицию с деталью, он производит базирование и закрепление детали 5 Щупы 4, закрепленные на щтоке 3, при несовпадеНИИ их расположения с характерными особенностями Детали 5, например, с отверстиями 14 или с ее рельефом, упираясь в поверхность детали б, перемещают што 3 с рычагами 1О и 11 на расстояние, равное разности между уровнями- копиров 12 и 13. Рычаг 10 выводится из зацепления с копиром 12, рычаг 11 вводится в зацепление с копиром 13. При перемеще нии манипулятора по направлению вдоль копиров, копир 13, разворачивая рычаг 11, производит поворот щтанги 1 со схватом вокруг оси по часовой стрелке и устанавливает деталь на рабочую позицию. При совпадении расположения щупов 4, закрепленных на штоке 3, с характер ными особенностями Детали 5, щупы 4 утойают в них, опуская щток 3 с рычага ми 10 и 11 таким образом, что рычаг 10 вводится в зацепление с копиром 12, а рычаг 11 выводится из зацепления.с копиром 13. При перемещении механизма манипулятором происходит пово рот щтанги 1 со схватом и Деталью 5 против часовой стрелки. Деталь 5 перемещается в то же Положение, что и в выщеуказанном случае. Возврат рычагов 10 и 11 в исходное положение производится пружинами возврата 7 и 9 при перемещении механизма ориентирования манипулятором в исходное положение. Схват позволяет повысить производительность за счет совмещения во времени операций ориентирования и захватывание детали. Форм у л а и зоб р е т е н и я Схват манипулятора, содержащий корпус, захватные элементы и щупы, отличающийся тем, что, с целью повыщения производительности, он снабжен копирами, полой щтангой и расположенным в ней подпружиненным щтоком, причем штанга установлена в корпусе с возможностью возвратно-поступательного перемещения и поворота вокруг оси копира, а на щтанге и щтоке смонтированы соответственно захватные элементы и щупы, при этом копиры : установлены на корпусе на разных уровнях и расстояние между ниад равно высоте щупов. . Источники информацииТ принятые во внимание при экспертизе 1. Авторское свидетельство СССР Г9 621628, кл. В 65 G 47/24, 1979.
f(f(
