/f
(Л
fZ
4 Х 00
о:
о
00
Фиг 1
и подпружиненные посредством возвратных пружин 10. На захватных рычагах 9 установлены с возможностью ограниченного поворота и взаимодействия с кулачком 5 размыкающие рычаги 11, подпружиненные относительно захватных рычагов 9. Шток 3 подпружинен относительно кбрпуса 1 посредством пружины 4 в сторону сближения кулачка 5 с корпусом 1. При работе устройства схват опускается манипулятором, связанным со штоком, на транспортируемую деталь. Упоры 2 упираются в поверхность детали, а шток 3 продолжает движение. При этом кулачок 5 освобождает размыкающие рычаги 11 и под действием пружин 10 захватные рычаги 9 захватывают деталь. При подъеме щтока 3 кулачок 5 поднимается, причем размыкающие рычаги 1.1, отклоняясь, пропускают кулачок 5. После транспортировки детали она устанавливается на опорную поверхность, упоры 2 упираются в деталь, а кулачок 5, двигаясь вниз, поворачивает рычаги 11 и 9. Деталь при этом освобождается, а рычаги 9
. при подъеме штока 3 оказываются в разведенном положении вследствие упора рычагов 11 в упорный бурт 6. Аналогично осуществляется работа схвата при любом его пространственном положении, например горизонтальном. 1 з. п. ф-лы, 2 ил.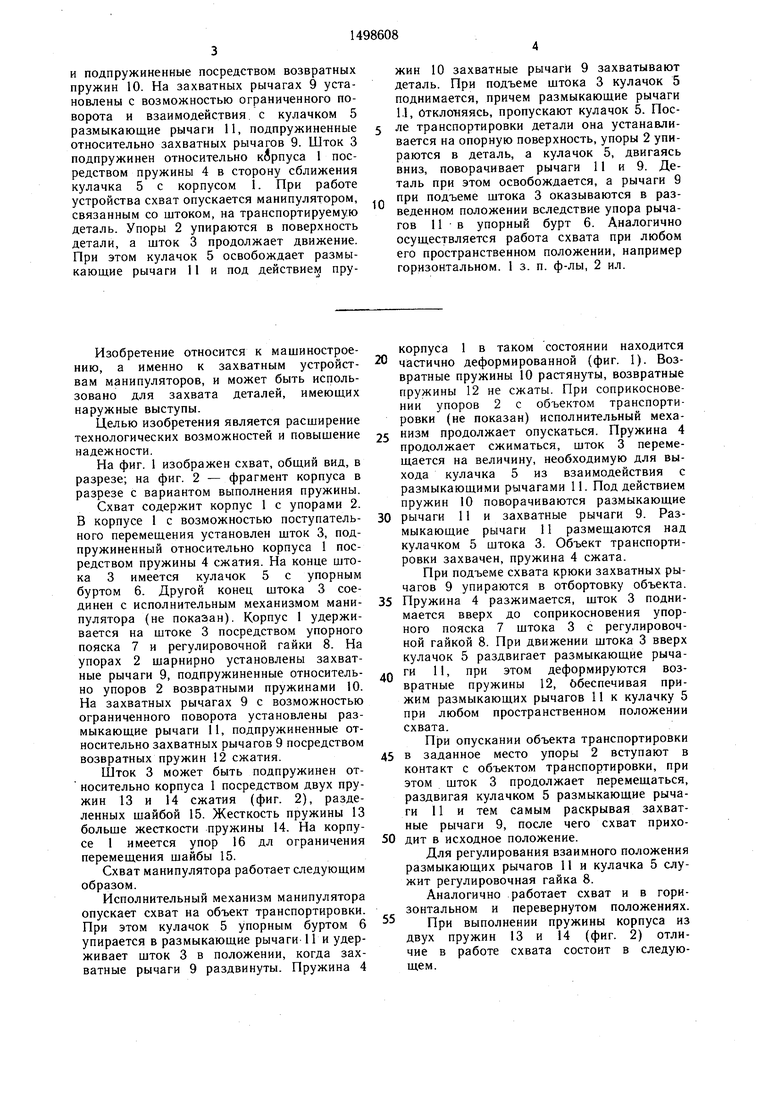
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1315303A1 |
| Схват сборочного манипулятора | 1988 |
|
SU1618650A1 |
| Захват манипулятора | 1981 |
|
SU982899A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Магазинное загрузочное устройство | 1985 |
|
SU1281375A1 |
| СХВАТ ДЛЯ ТОНКОСТЕННЫХ ДЕТАЛЕЙ | 2003 |
|
RU2253563C2 |
| Устройство для шагового перемещения спутников | 1985 |
|
SU1305085A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может быть использовано для захвата деталей, имеющих наружные выступы. Целью изобретения является расширение технологических возможностей. Схват содержит корпус 1 с упорами 2, подпружиненный относительно корпуса 1 шток 3, на конце которого установлен кулачок 5 с упорным буртом 6, захватные рычаги 9, шарнирно связанные с упорами 2 и подпружиненные посредством возвратных пружин 10. На захватных рычагах 9 установлены с возможностью ограниченного поворота и взаимодействия с кулачком 5 размыкающие рычаги 11, подпружиненные относительно захватных рычагов 9. Шток 3 подпружинен относительно корпуса 1 посредством пружины 4 в сторону сближения кулачка 5 с корпусом 1. При работе устройства схват опускается манипулятором, связанным со штоком, на транспортируемую деталь. Упоры 2 упираются в поверхность детали, а шток 3 продолжает движение. При этом кулачок 5 освобождает размыкающие рычаги 11 и под действием пружин 10 захватные рычаги 9 захватывают деталь. При подъеме штока 3 кулачок 5 поднимается, причем размыкающие рычаги 11, отклоняясь, пропускают кулачок 5. После транспортировки детали она устанавливается на опорную поверхность, упоры 2 упираются в деталь, а кулачок 5, двигаясь вниз, поворачивает рычаги 11 и 9. Деталь при этом освобождается, а рычаги 9 при подъеме штока 3 оказываются в разведенном положении вследствие упора рычагов 11 в упорный бурт 6. Аналогично осуществляется работа схвата при любом его пространственном положении, например горизонтальном. 1 з.п. ф-лы, 2 ил.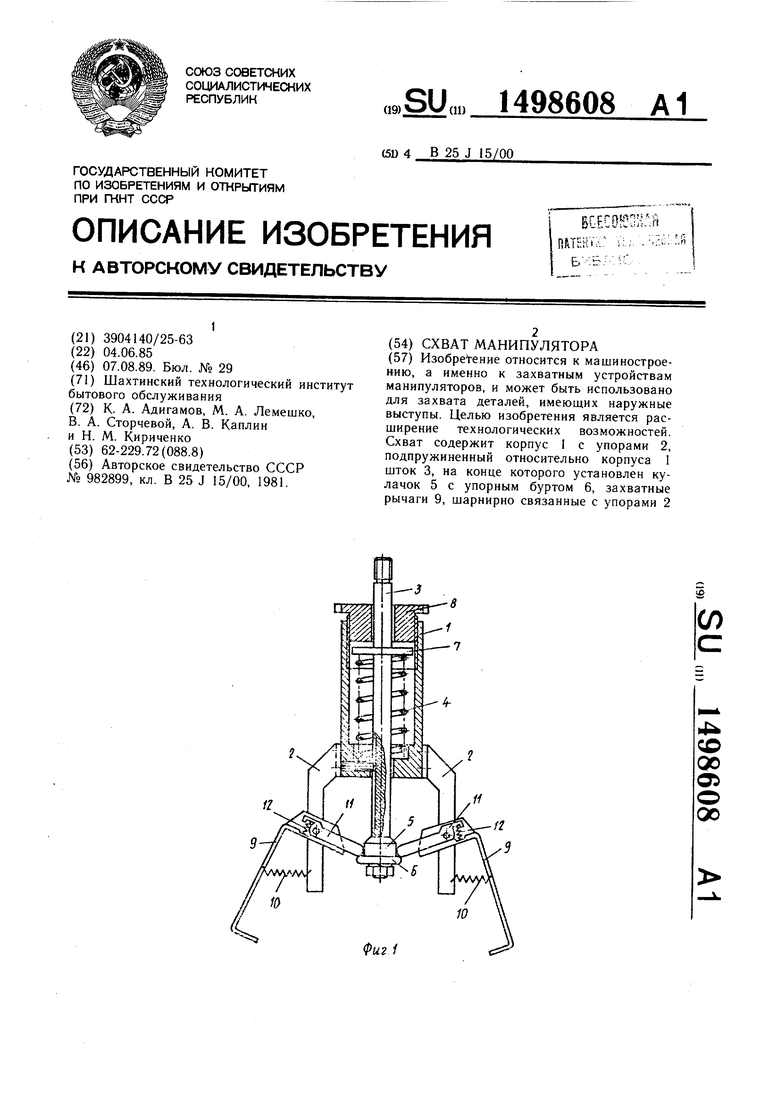
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может быть использовано для захвата деталей, имеющих наружные выступы.
Целью изобретения является расширение технологических возможностей и повышение надежности.
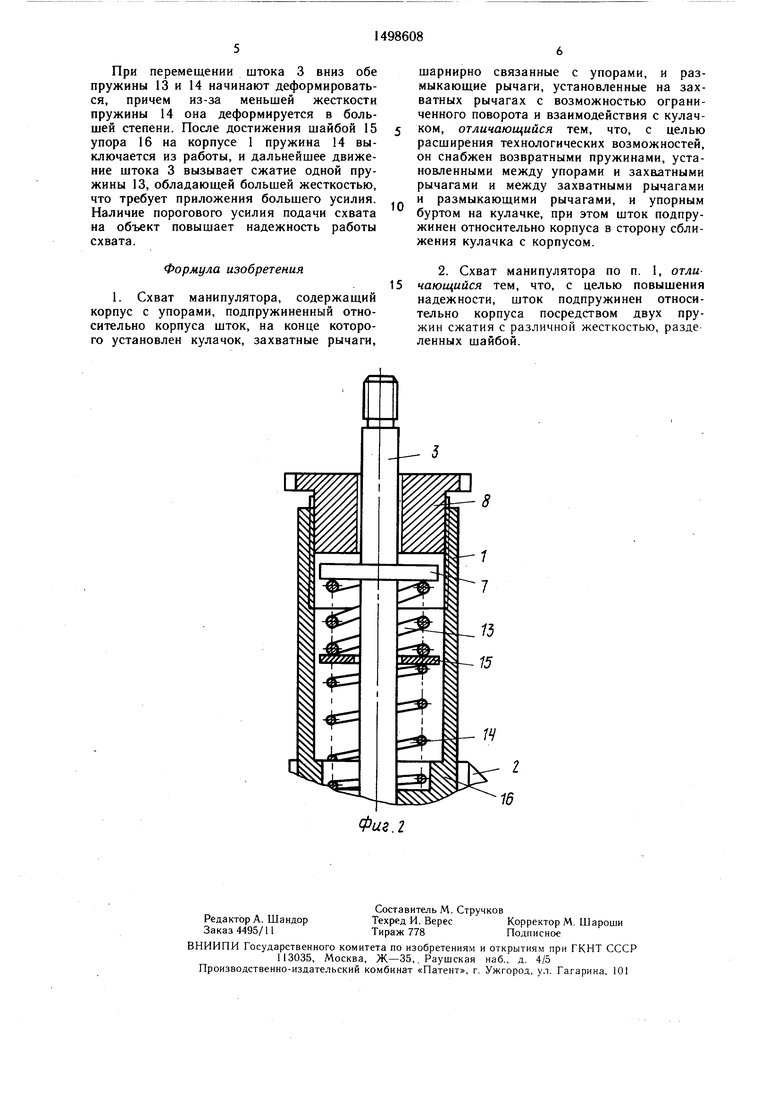
На фиг. 1 изображен схват, общий вид, в разрезе; на фиг. 2 - фрагмент корпуса в разрезе с вариантом выполнения пружины.
Схват содержит корпус 1 с упорами 2. В корпусе 1 с возможностью поступательного перемещения установлен щток 3, подпружиненный относительно корпуса 1 посредством пружины 4 сжатия. На конце щтока 3 имеется кулачок 5 с упорным буртом 6. Другой конец штока 3 соединен с исполнительным механизмом манипулятора (не показан). Корпус 1 удерживается на штоке 3 посредством упорного пояска 7 и регулировочной гайки 8. На упорах 2 шарнирно установлены захватные рычаги 9, подпружиненные относительно упоров 2 возвратными пружинами 10. На захватных рычагах 9 с возможностью ограниченного поворота установлены размыкающие рычаги И, подпружиненные относительно захватных рычагов 9 посредством возвратных пружин 12 сжатия.
Шток 3 может быть подпружинен от- носительно корпуса 1 посредством двух пружин 13 и 14 сжатия (фиг. 2), разделенных щайбой 15. Жесткость пружины 13 больше жесткости пружины 14. На корпусе 1 имеется упор 16 дл ограничения перемещения щайбы 15.
Схват манипулятора работает следующим образом.
Исполнительный механизм манипулятора опускает схват на объект транспортировки. При этом кулачок 5 упорным буртом 6 упирается в размыкающие рычаги 11 и удерживает щток 3 в положении, когда захватные рычаги 9 раздвинуты. Пружина 4
корпуса 1 в таком состоянии находится
частично деформированной (фиг. 1). Возвратные пружины 10 растянуты, возвратные пружины 12 не сжаты. При соприкосновении упоров 2 с объектом транспортировки (не показан) исполнительный меха5 низм продолжает опускаться. Пружина 4 продолжает сжиматься, шток 3 перемещается на величину, необходимую для выхода кулачка 5 из взаимодействия с размыкающими рычагами 11. Под действием пружин 10 поворачиваются размыкающие
0 рычаги 11 и захватные рычаги 9. Размыкающие рычаги 11 размещаются над кулачком 5 щтока 3. Объект транспортировки захвачен, пружина 4 сжата.
При подъеме схвата крюки захватных рычагов 9 упираются в отбортовку объекта.
5 Пружина 4 разжимается, шток 3 поднимается вверх до соприкосновения упорного пояска 7 щтока 3 с регулировочной гайкой 8. При движении щтока 3 вверх кулачок 5 раздвигает размыкающие рычар ги II, при этом деформируются возвратные пружины 12, ббеспечивая прижим размыкающих рычагов 11 к кулачку 5 при любом пространственном положении схвата.
При опускании объекта транспортировки
5 в заданное место упоры 2 вступают в контакт с объектом транспортировки, при этом щток 3 продолжает перемещаться, раздвигая кулачком 5 размыкающие рычаги II и тем самым раскрывая захватные рычаги 9, после чего схват прихо0 дит в исходное положение.
Для регулирования взаимного положения размыкающих рычагов 11 и кулачка 5 служит регулировочная гайка 8.
Аналогично работает схват и в горизонтальном и перевернутом положениях.
При выполнении пружины корпуса из двух пружин 13 и 14 (фиг. 2) отличие в работе схвата состоит в следующем.
При перемещении штока 3 вниз обе пружины 13 и 14 начинают деформироваться, причем из-за меньшей жесткости пружины 14 она деформируется в большей степени. После достижения шайбой 15 упора 16 на корпусе 1 пружина 14 выключается из работы, и дальнейшее движение штока 3 вызывает сжатие одной пружины 13, обладающей большей жесткостью, что требует приложения большего усилия. Наличие порогового усилия подачи схвата на объект повышает надежность работы схвата.
Формула изобретения
. Схват манипулятора, содержащий корпус с упорами, подпружиненный относительно корпуса щток, на конце которого установлен кулачок, захватные рычаги.
0
шарнирно связанные с упорами, и размыкающие рычаги, установленные на захватных рычагах с возможностью ограниченного поворота и взаимодействия с кулачком, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен возвратными пружинами, установленными между упорами и захватными рычагами и между захватными рычагами и размыкающими рычагами, и упорным буртом на кулачке, при этом шток подпружинен относительно корпуса в сторону сближения кулачка с корпусом.
Ь-
| Захват манипулятора | 1981 |
|
SU982899A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
