Изобретение относится к технике автоматизированного управления производственными процессами, а именно к устройствам для использования в системах числового программного управления станками.
Известен линейный цифровой интерполятор [А.с. 920636, СССР, 1982 г.], содержащий сдвиговые регистры координатных приращений, блоки совпадения, сумматор, блок анализа знака оценочной функции, блок анализа знака разности координатных приращений. Их взаимные связи обеспечивают нахождение начального значения оценочной функции, равного

где Б и М - большее и меньшее координатные приращения соответственно.
Это обеспечивает минимальную погрешность линейной цифровой интерполяции на уровне не более 0,5 шага интерполяции.
Недостатком этого интерполятора является отсутствие возможности вычисления линейной цифровой интерполяции в многомерном (многокоординатном) пространстве, выше двухкоординатного.
Наиболее близким к заявляемому интерполятору является многокоординатный цифровой интерполятор [А.с. 966665 СССР, 1982 г.]. Он содержит блок программы и счетчик приращений, счетным входом соединенный с выходом блока задания скорости, содержит (n-1)- одноразрядных сумматоров и (n-1) блоков двухкоординатной интерполяции, причем каждый i-ый одноразрядный сумматор соединен первым входом с выходом i-ой координаты блока программы и входом первой координаты i-го блока двукоординатной интерполяции, вторым входом - с входом второй координаты каждого i-го блока двухкоординатной интерполяции и выходом (i+1)-гo одноразрядного сумматора, при этом выход первого одноразрядного сумматора соединен с установочным входом счетчика приращений, а второй вход (n-1)-гo одноразрядного сумматора подключен к выходу n-ой координаты блока программы, каждый i-ый блок двухкоординатной интерполяции соединен импульсным входом с выходом второй координаты (i-1)-гo блока двухкоординатной интерполяции, а выходом первой координаты - с выходом i-ой координаты устройства, причем импульсный вход первого блока двухкоординатной интерполяции подключен к выходу блока задания скорости, а выход второй координаты (n-1)-гo блока двухкоординатной интерполяции - к выходу n-ой координаты устройства.
Его недостатком является повышенная методическая абсолютная погрешность, равная одному шагу интерполяции. Она вызвана неучетом начального значения оценочной функции по формуле (1), а полагаемой в прототипе, равной нулю.
Задача изобретения - совершенствование многокоординатного цифрового интерполятора.
Технический результат - обеспечение максимально возможной точности цифровой интерполяции (погрешность менее 0,5 шага интерполяции) прямой линии в n - координатном пространстве (n>2).
Технический результат достигается за счет того, что в многокоординатный цифровой интерполятор, содержащий блок программы и счетчик приращений, счетным входом соединенный с выходом блока задания скорости, (n-1) одноразрядных сумматоров и (n-1) блоков двухкоординатной интерполяции, причем каждый i-й одноразрядный сумматор соединен первым входом с выходом i-й координаты блока программы и входом первой координаты i-го блока двухкоординатной интерполяции, вторым входом - с входом второй координаты каждого i-го блока двухкоординатной интерполяции и выходом (i+1)-гo одноразрядного сумматора дополнительно введены (n-1) - регистров, хранящих начальные значения оценочных функций и связанных по входу с блоком программы, а по выходу - с (n-1) одноименными блоками двухкоординатной интерполяции, соответственно. При этом выход первого одноразрядного сумматора соединен с установочным входом счетчика приращений, а второй вход (n-1)-гo одноразрядного сумматора подключен к выходу n-й координаты блока программы, каждый i-й блок двухкоординатной интерполяции соединен импульсным входом с выходом второй координаты (i-1)-гo блока двухкоординатной интерполяции, а выходом первой координаты - с выходом i-й координаты устройства, причем импульсный вход первого блока двухкоординатной интерполяции подключен к выходу блока задания скорости, а выход второй координаты (n-1)-то блока двухкоординатной интерполяции - к выходу n-й координаты устройства.
Введение дополнительно (n-1) регистров для хранения начальных значений оценочных функций в многокоординатный интерполятор позволило повысить точность интерполяции за счет учета начальных значений оценочной функции в каждой паре координат.
Это является новым техническим решением в технике цифровой интерполяции прямой в n - координатном пространстве, поскольку результаты проведенного заявителем анализа аналогов и прототипа не позволили выявить признаки, тождественные всем существенным признакам данного изобретения.
Предложенный интерполятор промышленно применим, поскольку его техническая реализация возможна с использованием типовых элементов микроэлектронной техники (интегральных логических схем).
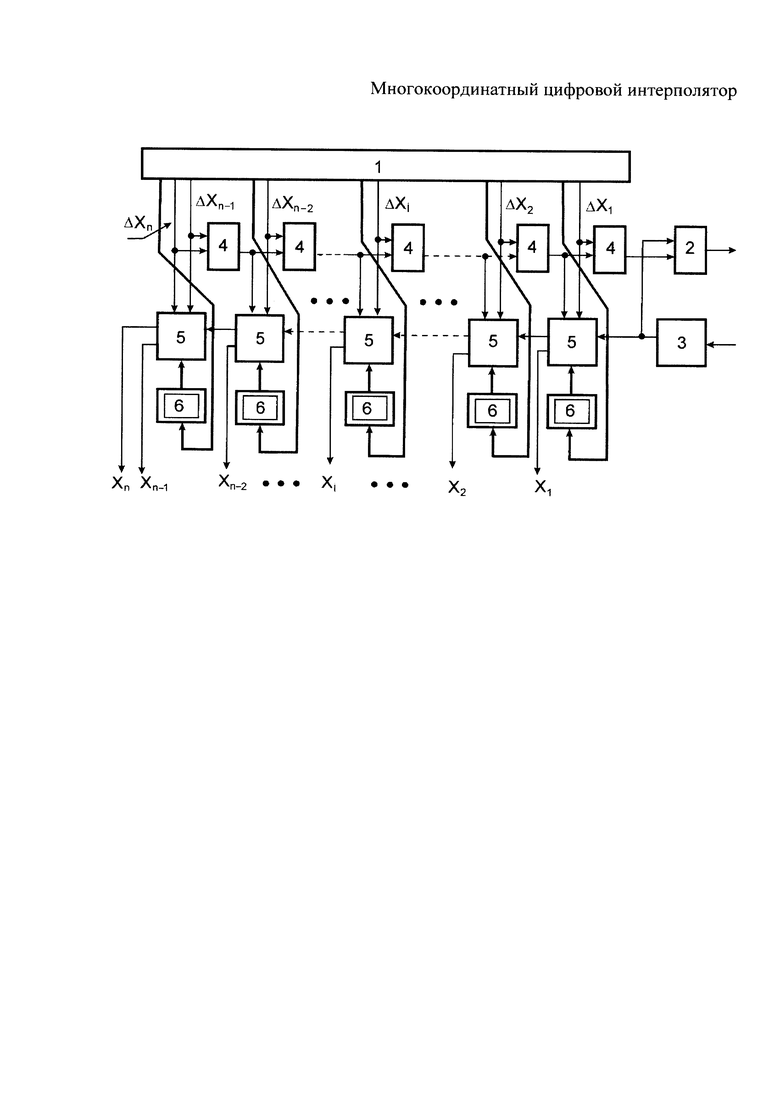
На фигУРЕ изображена схема интерполятора. Интерполятор содержит блок 1 программы, счетчик 2 приращений, блок 3 задания скорости, (n-1) одноразрядных сумматоров 4, (n-1) блоков 5 двухкоординатной интерполяции и (n-1) регистров 6 для хранения начальных значений оценочных функций. Блоки 5 двухкоординатной интерполяции работают по методу вычисления текущих значений оценочных функций.
Для интерполяции прямой в n-мерном пространстве из блока 1 программы вводятся величины координатных приращений ΔXi (i=1, 2,…, n).
Исходными программными данными для работы блоков интерполяции являются: для первого блока 5 двухкоординатной интерполяции -приращение по первой координате ΔХ1 и сумма приращений по остальным координатам для второго блока 5 двухкоординатной интерполяции - приращение по второй координате ΔХ2 и сумма
для второго блока 5 двухкоординатной интерполяции - приращение по второй координате ΔХ2 и сумма и т.д.; для последнего блока 5 двухкоординатной интерполяции - приращения по координатам ΔХn-1 и ΔХ1.
и т.д.; для последнего блока 5 двухкоординатной интерполяции - приращения по координатам ΔХn-1 и ΔХ1.
В счетчике 2 приращений с выхода первого одноразрядного сумматора 4 вводится общая сумма приращений .
Система оценочных функций, реализуемых в устройстве, имеет вид:
U1=X1ΔY2-Y2ΔX1; U2=X2ΔY3-Y3ΔX2;
Ui=XiΔYi+1-Yi+1ΔXi; Un-1=Xn-1ΔYn–УnΔХn-1, где
U1, U2,…, Un-1 _ оценочные функции,
Блок 1 программы выдает программные данные на одноразрядные сумматоры 4.
Одновременно, блок 1 программы выдает на регистры 6 начальные значения оценочных функций, рассчитанные по формуле (1) для каждой пары координат (ΔХ1 и ΔХ2), (ΔХ2 и ΔХ3), т.д.
В счетчике 2 приращений устанавливается сумма приращений по всем координатам, в регистрах первого блока 5 двухкоординатных интерполяций устанавливаются величины ΔХ1 и
приращений по всем координатам, в регистрах первого блока 5 двухкоординатных интерполяций устанавливаются величины ΔХ1 и во втором блоке 5 двухкоординатных интерполяций ΔХ2 и
во втором блоке 5 двухкоординатных интерполяций ΔХ2 и и т.д. в (n-1)-м блоке 5 двухкоординатных интерполяций величины ΔХn-1 и ΔХn. С пуском интерполятора импульсы блока 3 задания скорости поступают на вход первого блока 5 двухкоординатных интерполяций и счетчика 2 приращений. В первом блоке 5 двухкоординатных интерполяций по знаку функции U1 производится либо посылка импульса на выход первой координаты и первый выход устройства Х1 (U1<0) с вычислением нового значения U1
и т.д. в (n-1)-м блоке 5 двухкоординатных интерполяций величины ΔХn-1 и ΔХn. С пуском интерполятора импульсы блока 3 задания скорости поступают на вход первого блока 5 двухкоординатных интерполяций и счетчика 2 приращений. В первом блоке 5 двухкоординатных интерполяций по знаку функции U1 производится либо посылка импульса на выход первой координаты и первый выход устройства Х1 (U1<0) с вычислением нового значения U1  либо посылка импульса на выход второй координаты и на импульсный вход U1≥0 с вычислением нового значения
либо посылка импульса на выход второй координаты и на импульсный вход U1≥0 с вычислением нового значения  Аналогичные операции происходят и в следующих блоках 5 двухкоординатных интерполяций. Таким образом, с каждым тактом работы блока 3 задания скорости производится выдача сигнала только по одной из координат. Поэтому общее число тактов, необходимых для отработки участка, равно сумме приращений по всем координатам, которая будет зафиксирована счетчиком 2 приращений.
Аналогичные операции происходят и в следующих блоках 5 двухкоординатных интерполяций. Таким образом, с каждым тактом работы блока 3 задания скорости производится выдача сигнала только по одной из координат. Поэтому общее число тактов, необходимых для отработки участка, равно сумме приращений по всем координатам, которая будет зафиксирована счетчиком 2 приращений.
Предлагаемый многокоординатный интерполятор обеспечивает снижение методической погрешности в два раза, так как в нем учитываются начальные значения оценочных функций в каждой паре координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный цифровой интерполятор | 1981 |
|
SU966665A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
Изобретение относится к управлению производственным процессом. Многокоординатный цифровой интерполятор содержит блок программы, счетчик приращений, блок задания скорости, одноразрядные сумматоры и блоки двухкоординатной интерполяции. Дополнительно интерполятор содержит регистры для хранения начальных значений оценочной функции, связанных по входу с блоком программ, а по выходу - с одноименными блоками двухкоординатной интерполяции соответственно. Повышается точность цифровой интерполяции. 1 ил.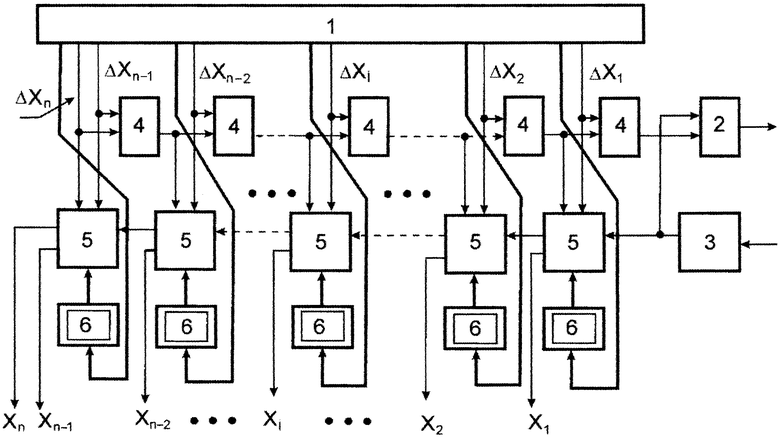
Многокоординатный цифровой интерполятор, содержащий блок программы, счетчик приращений, счетным входом соединенный с выходом блока задания скорости, (n-1) одноразрядных сумматоров и (n-1) блоков двухкоординатной интерполяции, причем каждый i-й одноразрядный сумматор соединен первым входом с выходом i-й координаты блока программы и входом первой координаты i-го блока двукоординатной интерполяции, вторым входом - с входом второй координаты каждого i-го блока двухкоординатной интерполяции и выходом (i+1)-го одноразрядного сумматора, при этом выход первого одноразрядного сумматора соединен с установочным входом счетчика приращений, а второй вход (n-1)-го одноразрядного сумматора подключен к выходу i-й координаты блока программы, каждый i-й блок двухкоординатной интерполяции соединен импульсным входом с выходом второй координаты (i-1)-го блока двухкоординатной интерполяции, а выходом первой координаты - с выходом i-й координаты устройства, причем импульсный вход первого блока двухкоординатной интерполяции подключен к выходу блока задания скорости, а выход второй координаты (n-1)-го блока двухкоординатной интерполяции - к выходу i-й координаты устройства, причем каждый i-й одноразрядный сумматор соединен первым входом с выходом i-й координаты блока программы и входом первой координаты i-го блока двухкоординатной интерполяции, а вторым входом - с входом второй координаты каждого i-го блока двухкоординатной интерполяции и выходом (i+1)-го одноразрядного сумматора, при этом выход первого одноразрядного сумматора соединен с установочным входом счетчика приращений, а второй вход (n-1)-го одноразрядного сумматора подключен к выходу n-й координаты блока программы, каждый i-й блок двухкоординатной интерполяции соединен импульсным входом с выходом второй координаты (i-1)-го блока двухкоординатной интерполяции, а выходом первой координаты - с выходом i-й координаты устройства, причем импульсный вход первого блока двухкоординатной интерполяции подключен к выходу блока задания скорости, а выход второй координаты (n-1)-го блока двухкоординатной интерполяции - к выходу n-й координаты устройства, отличающийся тем, что дополнительно содержит (n-1) регистров для хранения начальных значений оценочной функций, связанных по входу с блоком программ, а по выходу - с (n-1) одноименными блоками двухкоординатной интерполяции соответственно.
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Двухкоординатная система для программного управления | 1985 |
|
SU1249483A1 |
| Многокоординатный цифровой интерполятор | 1981 |
|
SU966665A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |

