(5) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ СПУТНИКОВ НА МЕТАЛЛОРЕЖУЩЕЙ СТАНКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТАЛЛОРЕЖУЩИЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2004 |
|
RU2257287C1 |
| Металлорежущий станок с устройством для автоматической смены обрабатываемых деталей | 1977 |
|
SU745649A1 |
| Устройство для автоматической смены спутников на металлорежущем станке | 1986 |
|
SU1400851A1 |
| Металлорежущий станок | 1982 |
|
SU1069972A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
| Переналаживаемая автоматическая линия | 1990 |
|
SU1726206A1 |
| Многооперационный станок | 1982 |
|
SU1096082A1 |
| Многооперационный станок | 1979 |
|
SU880689A1 |
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Металлорежущий станок | 1977 |
|
SU680858A2 |


1
Изобретение относится к станко строению и может быть использовано в металлорежущих станках с автоматической сменой обрабатываемых деталей.
Известно устройство для автоматической смены спутников на металлорежущем станке, содержащее основание с направляющими, расположенными по ходу движения рабочего стола, каретку для перемещения спутника и механизм захвата спутников tl1,
Недостатками данного устройства являются его сложность и длительный цикл смены спутников.
Целью изобретения является упрощение конструкции и сокращение времени на смену.
Для достижения указанной цели основание снабжено жестким упором, а механизм захвата выполнен в виде двух установленных на каретке с возможностью поворота рычагов, кинематически связанных между собой через дополнительно введенную ось. Один
ИЗ рымагов выполнен подпружиненным и снабжен захватом, а другой установлен с возможностью взаимодействия с неподвижным упором основания.
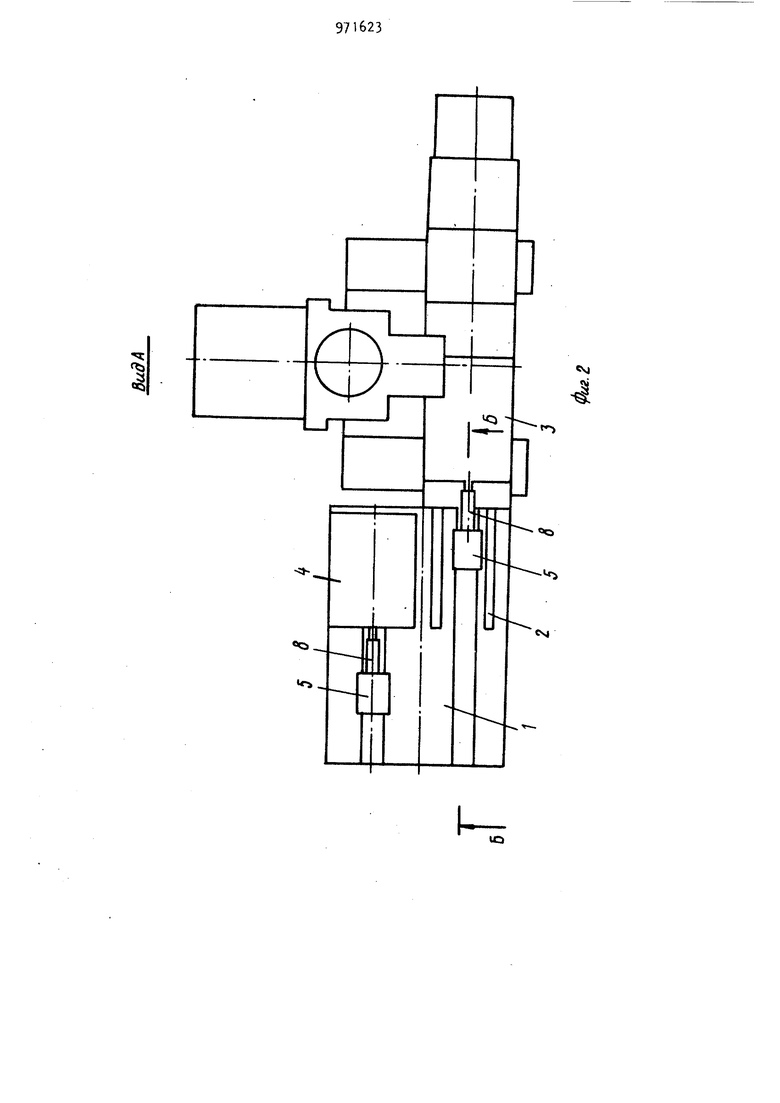
На фиг. 1 изображен металлорежущий станок с устройством для автоматической смены обрабатываемых деталей; на фиг, 2 - вид А на фиг„ 1; на фиг. 3 разрез Б-Б на фиг, 2,
Устройство для автоматической сме10ны спутников содержит основание 1, на верхней плоскости которого выполнены направляющие 2 . На направляющих 2 размещены спутники 3 и А, В корпусе основания 1 для каждого
IS спутника 3 и 4 встроен механизм их перемещения. Механизм перемещения выполнен в виде каретки 5 соединенной с гайкой 6, через которую проходит ходовой винт 7. на каретке установлен
20 механизм захвата спутника, выполненный в виде поворотных-рычагов 8 и Эг посаженных на осях 10 ,и 11, и взаимодействующих между собой посред3ством общей оси 12„ Рычаг b поджат пружиной 13о Свободный конец рычага 8 взаимодействует-с кронштейном I спутника, а рычаг 9 взаимодействует с неподзижным упором 15, установленным на основании 1 в конце хода каретки 5. Направляющие 2 установлены по ходу движения рабочего стола 16 фрезерного станка с вертикальным шпинделем 17. Станок работает следующим образоМсПо команде на загрузку спутника 3 с обрабатываемой деталью на рабочий стол 16 каретка 5-перемещается винтом 7 по ходу движения рабочего стола 16 в сторону шпинделя 17 и транспортирует спутник 3 на рабочий стол 16. В конце хода каретки 5 рычаг 9 находит на упор 15. поворачивается и отклоняет ось 12, которая поворачивает .рычаг 8 на оси 10 и сжи мает пружину 13о Рычаг 8 освобождает кронштейн I спутника 3 Каретка 5 находится в позиции ожидания до конца обработки детали. После завершения операции обработки детали спутни 3 подаётся рабочим столом 16 к карет ке 5о По команде на съем спутника с рабочего стола 16 каретка 5 начинает перемещаться в обратном направлении от шпинделя 17. Рычаг 9 освобождается от действия упора 15, а рычаг 8 действием пружины 13 поворачивается и своим концом захватывает кронштейн 1 спутника 3. При дальнейшем движении каретки 5 спутник 3 находит на 3 направляющие 2 основания 1, Для установки другого спутника k рабочий стол 16 устанавливают против последнего И цикл повторяется. Применение предлагаемого устройства значительно сокращает время на смену обрабатываемых деталей за счет сокращения подготовительных движений в цикле автоматической смены. Формула изобретения Устройство для автоматической смены спутников на металлорежущем станке, содержащее основание с направляющими, расположенными по ходу движения рабочего стола, каретку для перемещения спутника и механизм захвата спутников, отличающееся тем, что, с целью упрощения конструкции и сокращения времени на смену, основание снабжено жестким упором, а механизм захвата выполнен а виде двух установленных на каретке с возможностью поворота рычагов, кинематически связанных между собой через дополнительно введенную ось, причем один из рычагов выполнен подпружиненным и снабжен захватом, а другой установлен с возможностью взаимодействия с неподвижным упором основания. Источники информации, принятые во внимание при экспертизе Ь Авторское свидетельство СССР № 568533, кл, В 23 Q 39/Oit, 197,
ч:
«vj
