, . ...;..-/
Изобретение относится к области ма1ишностроения, а именно к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные операции,. , Известен исполнительный орган манипулятора, содержащий сочлененные между собой звенья, вьшолйенные в виде рамок, основание и захват .
Этот исполнительный орган обеспечивает две поступательные степени подвижности.
Недостатком известного механизма яв яяется Отсутствие вращательной степени подвижности, что сужает технологические возможности, а также низкая кинематическая точность из-за наличия зазоров в направляющих.
Целью изобретения 51Вляётся расширение технологических возможностей путем увеличения числа степеней подвижности.
Эта цель достигается тем, что исполни тельный орган манипулятора снабжен
переходными звеньями и гибким элементом, а каждое основное звено снабжено четырьмя парами стержней имеющими сферические головки, причем в каждой паре один из стержней связан с предыдущим основным звеном, а другой - с последую- пшм, а пары последовательно расположенных стержней, соединены переходными звеньями, гибкий элемент расположен внутри переходнь1Х звеньев и связан с поршнем
10 ошового шшиндра.
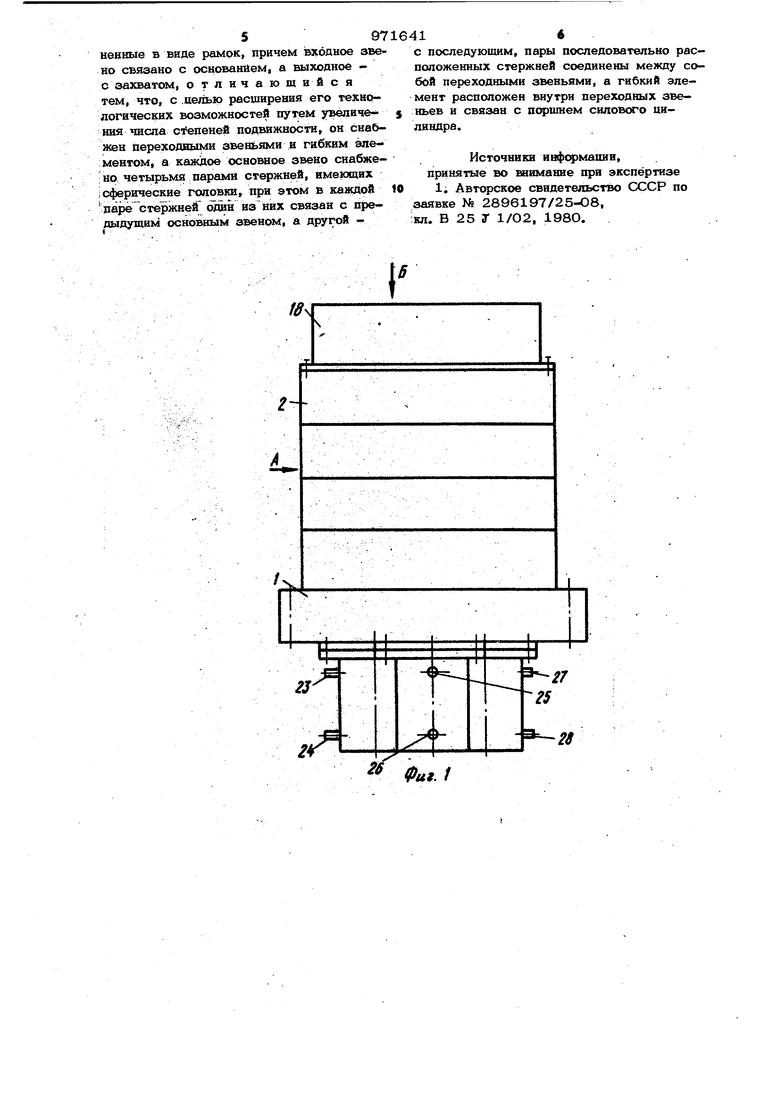
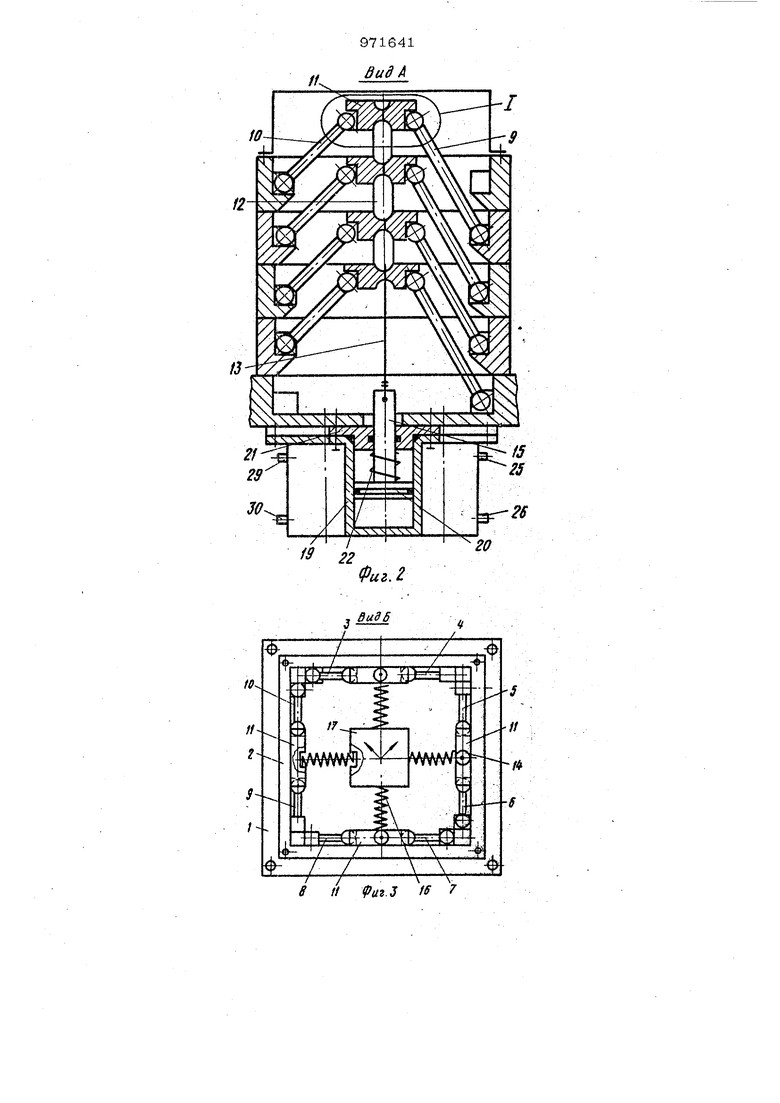
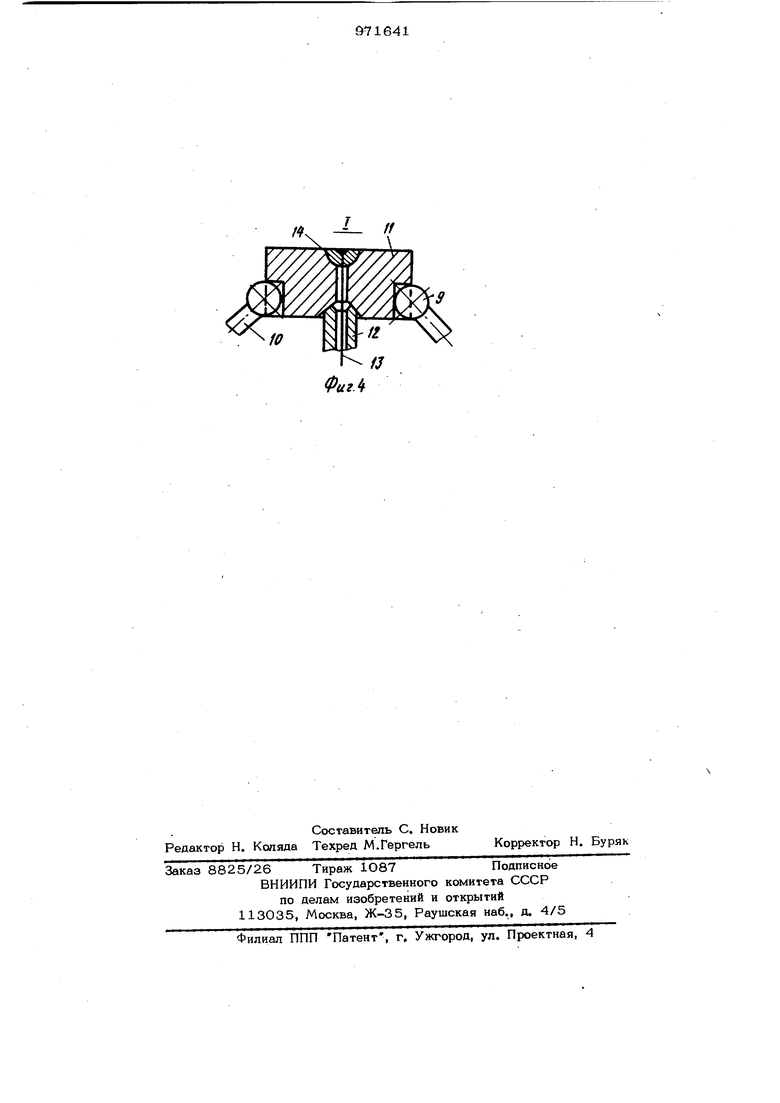
На фиг. 1 изображен исполнительный орган манипулятора; на фиг. 2 - вид А .на фиг. 1 (в разрезе)i на фиг. 3 - вид Б на иг. 1 (крышка снята); на фиг. 4 15узел J на фиг. 2 (в разрезе). .
Исполнительный орган манипулятора содержит основание 1 и взаимодействующие друг с другом и с основанием 1 ос20 .новные звенья 2, выполненные в виде рамок квадратной фсфмы в плане. На внутренних поверхностях основных звеньев 2 образованы углубления, в которых разме- 39 щепы сферические окончания стержней 310. Стержни 3 и 4, 5 и 6, 7 и 8, 9 и 10 образуют пары причем в каждой паре сферическое окончание одного стержня ра папожено в углублении предыдущего (считая от основания) основного звена, а сфе рическое окогиание второго стержня этой же пары расположено в углублении следуЮ щего (смежного) основного звена (фиг. 2) Пары сходящихся верхними концами стержней образуют стержневую систему/ связанную траверсами 11 и переходными зве ньями 12 со сферическими окончаниями, входящими, как и сферические оконча1етя стержней 3-10 в углуЬления траверс 11. В траверсах 11- и переходных звеньях 12 выполнешл отверстия, в которых пропущены тросы 13 или другие гибкие элементы. Тросы-13 заделаны во вкладышах 14 (фиг. 4) и в штоках 15 силовых цилиндро:;., В исходном положении траверсы 11 ,аты к боковым поверхностям основ™ ных звеньев 2 усилиями пружин 16. Противопололсные концы пружин упираются в опору 17. Верхняя (фиг, 1) группа стержней закрыта крышкой 18, к которой крепится захват или другой рабочий орган (на чертеже не показан). Приводное устройство вынолнеио в виде четырех, силовых ЦЕШИНД ров, содержащих корпусы 19, поршни 20 выполненные заодно со штоками 15, и крышки 21 Поршни 20 подпружинены пружинами 22, предназначенными для удержания системы стержней в исходном положении при отсутствии давления в силовых ци линдрах. Подвод раьочей среды к силовым дилнндрам и ее сброс производится чеоез штуцеры 23..-ЗО. Штуцеры 24, 26, 28 и 30 li данной конструкции соединены с атмосферой. Для уменьшения трения одна из ваа- имодействующих друг с другом плоскостей основных звеньев 2 может быть покрыта антифрикционным материалом (на пример, фторО 1ластом-4). Ис:полнительный орган манипулятора работает следующим образом. 13 исходном положении (при отсутствии давления в полостях силовых цилиндров или при равенстве давлений во всех иорш невых и всех штоковых полостях) систем неизменяема. Если давление в системе отсутсгвует, то усилия от внешних нагрузок не дол;кны лревыишть усилий, соада 22. 1-4 При необходимости получить движение вдоль оси X (фиг, 3) давление рабочей среды доплсно быть подано к штуцерами 25 (штоковые полости силовых цилиндров), а выпуск жидкости (газа) производится из штуцеров 27 и 29. При этом тросы 13 передадут усилия через : вкладыши 14 на траверсы 11 и, далее, через переходные звенья 12 последователь- но на группы стержней 7 и 8, 9 и 10, верхние сферические концы которых начну р двигаться вниз, а также на группы стержней 3 и 4j 5 и 6, верхние сферические концы которых начнут- двигаться. вверх (фиг, 3), В связи с тем, что в каждой паре стержней нижний конец одного стержня упирается в углубление предыдущего основного звена 2 (или основания 1), а нижний конец второго стержня той же пары упирается в углубление последующе- го (смежного) основного звена 2 (фиг. 2), возникают усилия, сдвигающие основные звенья 2 друг относительно друга. Основание 1 считаем неподвижным, поэтому вся система сдвинется на величину, равную сумме перемещений всех основных звеньев 2, Движение по оси (фиг, 3) обеспечивается подачей давления рабочей среды К штуцерам 23 и 29, .а ее выпуск проИЗВОДИТСЯ из штуцеров 25 и 27. При необходимости получить вращение вокруг продольной оси устройства по часовой .стрелке давление должно быть по- дано к штуцерам 23 и 27 сброс производится из штуцеров 25 и 29. При этом группы стержней .9 и 10 сообщат движение .вверх (фиг. 3), а группы стержней 5 и 6 сооЬшат конструкции аналогичное движение, но вниз (фиг1 З), создавая таким образом пару сил, необходимую для поворота каждого основного звена 2 относительно смежного (или основания 1). Исполнительный орган манипулятора обеспечивает три степени подвижности: две поступательных и одну вращательную, Кроме того, он обеспечивает повыщенную точность перемещения (вращения) в связи с тем, что зазоры между движущимися деталями ликвидированы. Это позволяет расширить технологические возможности устройства. Формула .изобретения Исполнительный орган манипулятора, содержащий силовой цилиндр и сочлененные между собой основные звенья, вьшолневные в виде рамок, причем входное звено связано с основанием, а выходное с захватом, отличающийся тем, что, с .целью расширения его технологических возможностей путем увепиче ния числа степеней подвижности, он снабжен переходными звеньями и гибким эпе- ментом, а каждое основное звено снабжено четырьмя парами стержней, имеющих i сферические головки, при этом в каждой даре сте;ржней одан из них связан с предыдущим основным звеном, а другой с последующим, пары последовательно расположенных стержней соединены между собой переходными звеньями, а гибкий элемент расположен внутри переходных зве:ньев и связан с поршнем силового цилиндра.
Источники информации, принятые во внимание при экспертизе
1; Авторское свидетельство СССР по заявке № 2896197/25-08, :кл. В 25 Т 1/О2, 198О.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
10
30
.-26 20
Фиг.г
Buds
