Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для автоматизации загрузки-выгрузки деталей в технологическое оборудование.
Известен промышленный робот, содержащий механическую руку с кистью в виде траверсы, на которой расположена группа схватов 1.
Недостатком известно.го робота является узость технологических возможностей промышленного робота.
Цель изобретения - расширение технологических возможностей .
Цель достигается тем, что промышленный робот снабжен расположенной на траверсе, по крайней мере одной державкой с индивидуальным приводом перемещения, на которой установлен схват.
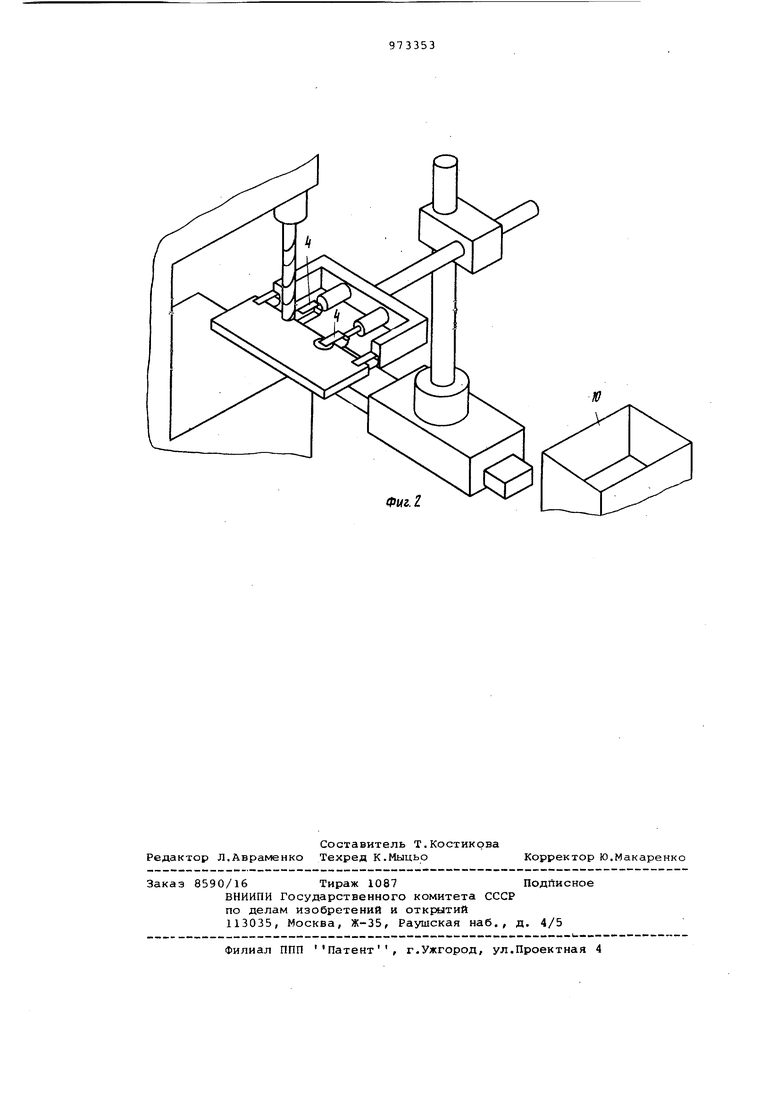
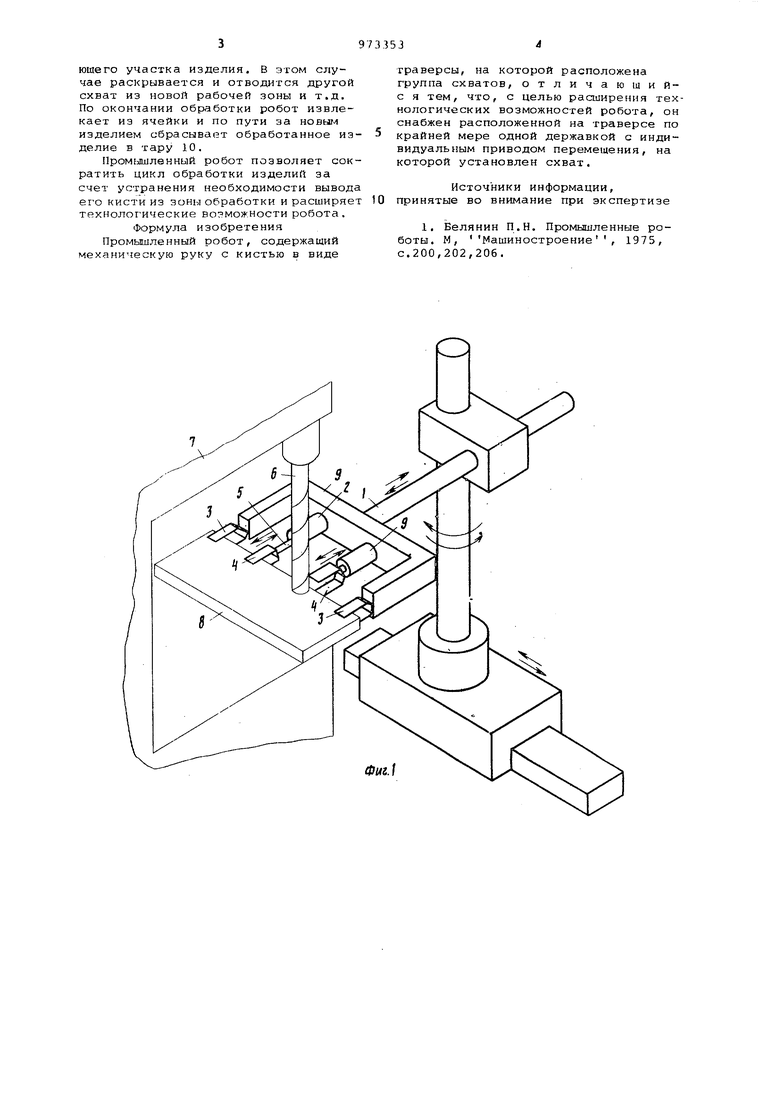
На фиг. 1 изображен промышленный робот в мсадент удержания изделия при обработке одного из его участков; на фиг. 2 - промышленный робот при обработке другого участка изделия,
Промишленный робот содержит механическую руку 1 с кистью в виде траверсы 2, на которой неподвижно закреплены схваты 3, а схваты 4 установ лены в державках 5, имеющих возможность перемещения относительно траверсы 2. Рабочий инструмент 6 закреплен на технологическом оборудовании 7, которая имеет ячейку для установки изделия 8. Привод 9 державки 5 представляет собой, например, пневмоцилиндр. Для накопления готовых изделий служит тара 10.
Устройство работает следующим об10разом.
Траверса 2 робота со схватами 3 и 4 захватывает изделие 8 с позиции загрузочного устройства и поворотом руки подает его в ячейку технологи15ческого оборудования 7.
Затем один из схватов 4, расположенньой в зоне работы инструмента 6, раскрывается и покидает рабочую зону с помощью привода 9 державки 5.
20
Остальные схваты продолжают удерживать изделие- в ячейке. Рабочий инструмент обрабатывает участок изделия 8. После окончания обработки этого участка и отвода инструмента
25 державка 5 со схватом 4 вводится в рабочую зону и вновь захватывает издел е.
Робот передвигает изделие на новую позицию в ячейке технологическо30го оборудования для обработки следуюшего участка изделия, В этом случае раскрывается и отводится другой схват из новой рабочей зоны и т.д. По окончании обработки робот извлекает из ячейки и по пути за новьал изделием сбрасывает обработанное изделие в тару 10.
Пром Л1 лвнный робот позволяет сократить цикл обработки изделий за счет устранения необходимости вывода его кисти из зоны обработки и расширяет технологические возможности робота. Формула изобретения
Промышленный робот, содержащий механическую руку с кистью в виде
траверсы, на которой расположена группа схватов, отличающийс я тем, что, с целью расширения технологических возможностей робота, он снабжен расположенной на траверсе по крайней мере одной державкой с индивидуальным приводом перемещения, на которой установлен схват.
Источники информации, принятые во внимание при экспертизе
1. Белянин П.Н. Промышленные роботы. М, Машиностроение , 1975, с.200,202,206.
| название | год | авторы | номер документа |
|---|---|---|---|
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |
| Автоматизированный комплекс для штамповки | 1986 |
|
SU1530305A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Промышленный робот модульного типа | 1983 |
|
SU1158344A1 |
| Промышленный робот | 1990 |
|
SU1756142A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Автоматическая линия горячей штамповки | 1988 |
|
SU1549665A1 |
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Установка для отделения листовых заготовок от стопы,подачи в пресс и удаления обработанного материала | 1982 |
|
SU1049265A1 |