(54) СКАНИРУЮиШЕ УСТРОЙСТВО К ДЕФЕКТОСКОПУ


| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующее устройство к дефектоскопу | 1982 |
|
SU1033961A2 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Сканирующее устройство к ультразвуковому дефектоскопу | 1985 |
|
SU1295329A1 |
| Устройство для контроля качества продольных сварных швов зубчатых колес | 2020 |
|
RU2751149C1 |
| МЕХАНИЗМ УСТАНОВКИ ДАТЧИКОВ ДЛЯ СКАНИРУЮЩЕГО УСТРОЙСТВА ДЕФЕКТОСКОПИИ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2186367C1 |
| Сканирующее устройство для ультразвукового контроля сварных швов изделий | 1982 |
|
SU1128161A1 |
| Устройство для ультразвукового контроля изделий | 1983 |
|
SU1147978A1 |
| Устройство для дефектоскопии цилиндрических изделий | 1991 |
|
SU1797048A1 |
| Устройство для ультразвукового контроля сварных швов изделий | 1982 |
|
SU1097934A1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |




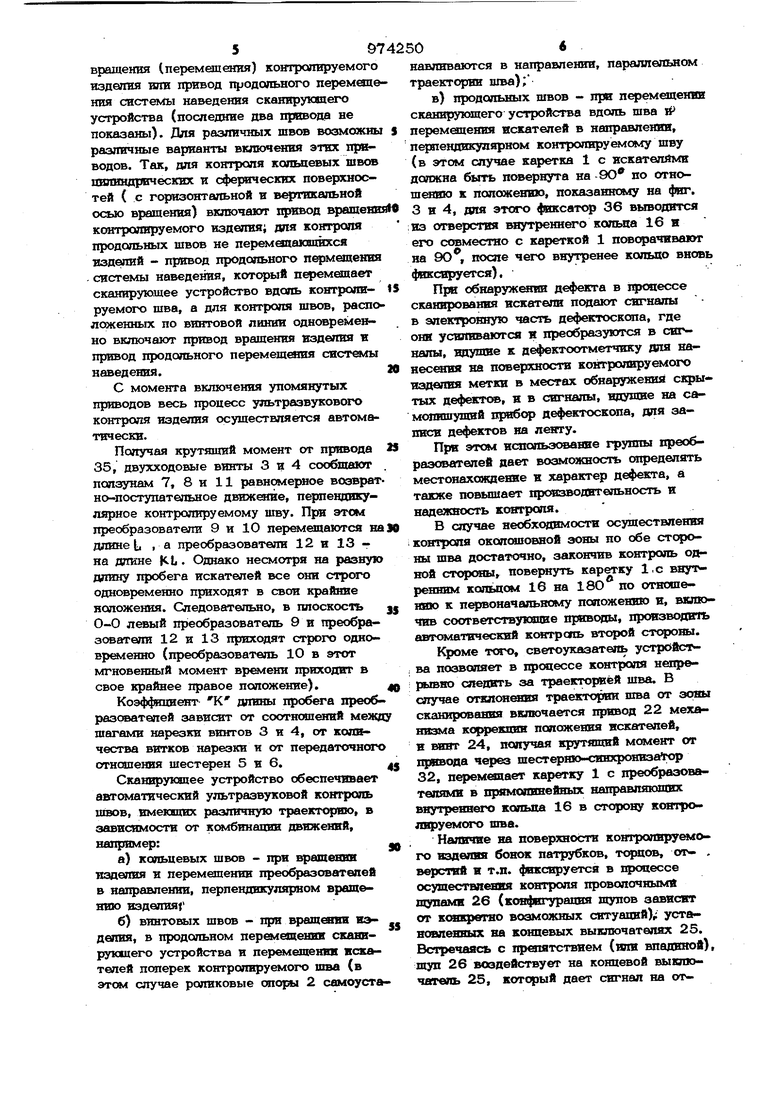
Изобретение относится к средствам неразрушающего контроля качества материалов и изделий и может быть применено в машиностроении. Известно сканирующее устройство к дефектоскопу, содержащее кривсяшшношатунный механизм, на рычаге которого размещен преобразователь дефектоскоп а Недостатком устройства является низкая маневренность, невозможность контроля выпуклых и вогнутых поверхностей. Наиболее близким техническим ропением к изобретению является сканирующее устройство к дефектоскопу, содержащее каретку на роликовых опорах с установленными на ней преобразователями и канал обработки сигналов преобразователей с самопишущим регистратором f 2J . . Недостатком устройства является ограниченность применения: невозмоокность контроля поверхностей с различной хрвБНЗНОЙ. Цель изо етения - обеспечение контроля поверхностей различной кривизны и ориентации. Обеспечение коррекции положения преобразователей и обеспечение надежности работы устройства. Поставленная цель достигается гам, что устройство снабжено поворотно-плаваюсцей подвеской, с которой связана КА ретка, имеюшей узел коррекшш ее угла наклона в выполненной в виде трех концентричных колец, на14жное и среднее вз которых соединены шарнирной осью, в среднем выполнен кольцевой паз, в которе с воаможностью ;: поворота в фиксации установлено внут юннее кольцо, на- ружное кольцо выполнено с радиальным пазом. Узел ко фекцни угла наклона попвески выполнен в виде держателя в шарнврно-соедвненной с ним вшгговой пары, BBHT которой имеет на конце перпендикулярный его осв палец, взаимодействующий с пазом наружного кольца подвескя. 97 Каретка вьшопнена в виде рамы с двумя параллельными налравшсюишми, раз . мешенными в ее плоскости, и винтовой пары с приводом, гайка которой закреплена на внутреннем кольпе подвески и установлена с возможностью возвратнопоступательного перемещения по налравлякшшм, а винт с хфиводом жестко закре лен на раме. Кроме того, устройство снабжено узлом блокировки, вьшолненным в виде кон цевых выключателей и охватывающих периметр каретки проволочных щупов. На фиг. 1 изображена кинематическая схема устройства; на фиг.. 2 - ползун и карданная подвеска преобразователя продольный разрез, тонкими линиями по казаны варианты профиля поверхности, поверхности контролируемого изделия) на фиг. 3 и 4 - сканирующее устройство размещенное соответственно на изделии вьшуклой и вогнутой формы, вид сбоку. Сканирукшее устройство содержит каретку 1, которая размещена на ролико вых опорах 2. В каретке с возможностью свободного вращения установлены два двухходовых винта 3 и 4. На винтах соответственно жестко закреплены шестерни 5 и 6. На винт 4 посажены ползуны 7 и 8, к которым щарнирно подсоединены соответственно преобразователи 9 и 10. На винт 3 посажен ползун 11, к котгорому шарнирно подсоединены преобра зователи 12 и 13. Устройство имеет поворотно-плавающу подвеску, имеющую узел коррекшш угла наклона каретки 1, вьшолненшз1Й в виде трех коицентрично установленных колец 14, 15 и 16. Наружное ксвшдо 14 и среднее 15 соединены щарнирной осью (не показано). Среднее ксльцо имеет кольцевой паз, в котором с возможностью поворота и фиксации установлено третье внутреннее кольцо 16. В наружном кольце 14 вьшолн радиальный паз. Узел ко феюши угла накло1{а подвески вьшолнен в виде держателя 17 и щарнирно соединенной с ним винтовой пары, вин 18 которой имеет на конце перпендикулярный его оси палец 19, взаимодействуххций с пальцем (не показано) наружного кольца 14. Каретка 1 выполнена в виде рамы с двумя парбшлепьяыми- иаправлягюошми 2О и 21, размшценнымв в ее плоскости и винтовой пары с приводом 22. Гайка 23 этой пары закреплена на внутреннем кешьце 16 и установлена с возможностью возвратно-поступательного перемещения по направляющим. Винт 24 и привод 22 жестко закреплены на раме. Узел блокировки устройства вьшолнен в виде концевых выключателей 25 установленных на каретке 1 и охватывающих ее проволочных щупов 26. Устройство работает следующим образом. Наводимый на контролируемое изделие 27 преобразователь под действием пружи ны 28 автоматически приспосабливается, в двух взаимно перпендикулярных ппос- костях к его профилю. Положение держателя 29 соответствующего преобразователя относительно корпуса его ползуна можно изменять регулировочным винтом 30. Вращением щестерни,5 при выведенной из зацепления кулачковой полумуфты 31 с шестерней-синхронизатором 32 преобразователи 12 и 13, .9 и 10 выводят в плоскость О-О, соответствующую началу ультразвукового контроля. С помощью системы 33 наведения устройство наводят на контролируемое изделие 27 до тех пор пока пружина 34 надежно прижимает роликовые опоры 2 к поверхности изделия. Одновременно винтом 18 корректируют положение устройства таким образом, чтобы палец 19 занял среднее положение в радиальном пазу кольца 14. Таким образом, устройство в хфоцессе контроля непрерывно самоустанавливается на поверхности контролируемого изделия в двух взаимно перпендикулярных направлениях: в одном --в пределах угла в другом - пределах зазора сГ . Вместе с тем, при наведении сканирующего устройства на контролируемое изделие 27, расположенные внутри базы роликовых опор 2 преобразователи 9, 10, 12 и 13, встречаясь с поверхностью изделия, под действием 28 автонсж но самоустанавливаются на ней в двух взаимно перпендикулярных направлениях и в дальнейшем, при осуществлении про-; цесса сканирования гарантировано следят за этой поверхностью. При этом допускается неравенство угловой,, выпуклых поверхностей и, аналогично, углов р) и /) для вогнутых (для контроля вогнутых поверхностей держателн 29 с помощью регулировочных винтов ЗО подаются вперед, в сторону контролируемого изделия). Затем включают электронную систему дефектоскопа, привод 35 механизма перемещения искателей, а также, в зависимости от траектории щва, привод вращения (перемещения) контролируемог изделия 1УШ привод продольного перемещ ния системы наведения сканирукяаего устройства (последние два привода не показаны). Дпя различных швов возмозкн различные варианты включения этих приводов. Так, для контроля колЫ1евых швов шшиндрвческих и сферических поверхностей ( с горизонтальной и верттЕкапьной осью вращения) включают хфивод врашев контролируемого изделия; для контроля продольных швов не перемешакшшхся изделий - привод продольного пермездеки . системы наведения, перемзсцает сканирующее устройство вдоль контролируемого шва, а для контроля швов, распо ложенных по винтовой линии одновременно включают привод вращения изделия и привод продсвхьного перемещения системы наведения. С момента включения упомянутых приводов весь процесс ультразвукового контроля изделия осуществляется автоматически. Получая крутящий момент от привода 35, двухходовые винты 3 и 4 сообщают ползунам 7, 8 и 11 равномерное возврат но-поступательное движение, перпендикулярное контролируемому шву. При этом преобразоватепи 9 и 1О перемещаются и длине L 18 преобразователи 12 и 13 на длине KL. Однако несмотря на разную длину пробега искателей все они строго одновременно приходят в свои крайние положения. Следовательно, в плоскость 0-0 левый пр еобразователь 9 и преобразователи 12 и 13 приходят строго одновременно (преобразователь 10 в этот мгновенный момент приходпг в свое крайнее правое положение). Коэ4)фшшент К длины пробега преобразователей зависит от соотношений межд шагами нарезки винтов 3 и 4, от колкчества витков нарезки и от передаточного отношения шестерен 5 и 6. Сканирующее устройство обеспечивает автоматический ультразвуковой кошроль IUBOB, имеющих различную траектсфшо, в зависимости от кс 4бинации движений, например: а)кольцевых швов - при вращении изделия и перемещении преобразователей в направлении, перпендикулярном вращению изделня{ б)винтовых швов - при вращеяии и делия, в продольном перемещении сканирующего устройства и пер дещенвн нскателей поперек контролируемого шва (в этом случае роликовые опоры 2 самоуста навливаются в направлении, параллельном траектории шва); в) продольных швов - при перемещение сканирующего устройства вдоль шва й перемещения искателей в направлении, перпенфскулярном контролируемому шву (в этом случае каретка 1 с нскател5}ми должна быть повернута на -9О по отношению к положению, показанн1я «у на фиг. 3 и 4, для этого факсатор 36 выводится ;из отверстия внутреннего кольда 16 и его совместно с кареткой 1 поварачяъваот на 9О , после чего внутренее колыхо вновь фиксируется), При обнаружении дефекта в iqKmecce сканирования искатели подают сигналы в электронную часть дефектоскопа, где ОНИ усиливаются я преобразуются в сигналы, идущие к дефектоотметчику дая наиесения яа поверхности коитролируемсях) изделия метки в местах обнаружения С1фытых дефектов, я в сигналы, идущие на самопишущий п|шбор дефектоскопа, для записи дефектов иа ле1ггу. При этсл исповп эование группы преобраэссателей дает возможность определять местонахсокденяе я характер дефекта, а также повышает производительность и надежность контроля. В случае необходимости осуществления контроля окопсиповной зоны по обе стороны шва достаточно, закончив контроль одной , повернуть каретку 1,с внут рениим котлом 16 иа 18О по отношению к первоначальному положению я, включив соответствующие привс цл, производить автоматический контрспь второй стороны. Кроме того, светоуказатель устройства позволяет в процессе контроля непрерывно следить за траекто|Я ёй шва. В случае отклон шя траектории шва от зоны сканирсжЕШЯЯ включается привод 22 механизма каррекаяя положения искателей, я винт 24, получая крутящий момент от привода через шестерню-синхрониза ч р 32, перемещает каретку 1 с преобразоватепямя в прямооянейиых направляющих внутреннего кольца 16 в сторону коитроляруем(яч шва. Налячяе яа поверхности кошроляру лого изделяя боиок патрубков, торнов, от- , верстяй я т.п. фиксируется в процессе осуществпеакя контроля проволочными щуламя 26 (конфигурация щупов завясят от ксшкрвтяо возможных ситуаций); устаяовленяых яа концевых выключателях 25. Встречаясь с препятствяем (иля впадиной), уп 26 воздействует на концевой выключвггель 25, который дает сигнал на отвод системы 33 наведения со сканирующим устройством от контротфуемого изделия или на отключение привода вращения изделия.
Формупа изобретения
взаимодействующий с
пазом наружного кольца подвески.
ее плоскости, и винтовой пары с приводом гайка которой закреплена на внутреннем кольце подвески и установлена с возможностью возвратно-поступательного перемещения по направлякяцим, а винт с приводом жестко закреплен на раме.
Источники инфо1ии1ации, пришлые во внимание при экспертизе
№ 565247, кл. OOlN 27/86, 1973.
У /4J6 15 //Л Jg7 /-25 1(онгпантная живность dfy .д
