(54) МЕХАНИЗМ ПОДАЧИ И ЗАЖИМА ПРУТКА ТОКАРНОГО МНОГОШПИНДЕЛЬНОГО АВТОМАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Многошпиндельный токарный автомат | 1979 |
|
SU1040696A1 |
| Многошпиндельный токарный авто-MAT | 1979 |
|
SU852448A1 |
| Многошпиндельный токарный автомат | 1974 |
|
SU567554A1 |
| Токарный многошпиндельный станок | 1989 |
|
SU1660850A1 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1979 |
|
SU882704A1 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1979 |
|
SU872038A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU933269A1 |
| Автомат для двухсторонней обработки концов деталей | 1973 |
|
SU495161A1 |
| Устройство для автоматической подачи прутков | 1988 |
|
SU1717288A1 |
| Устройство для подачи материала к обрабатывающей машине | 1983 |
|
SU1091976A1 |
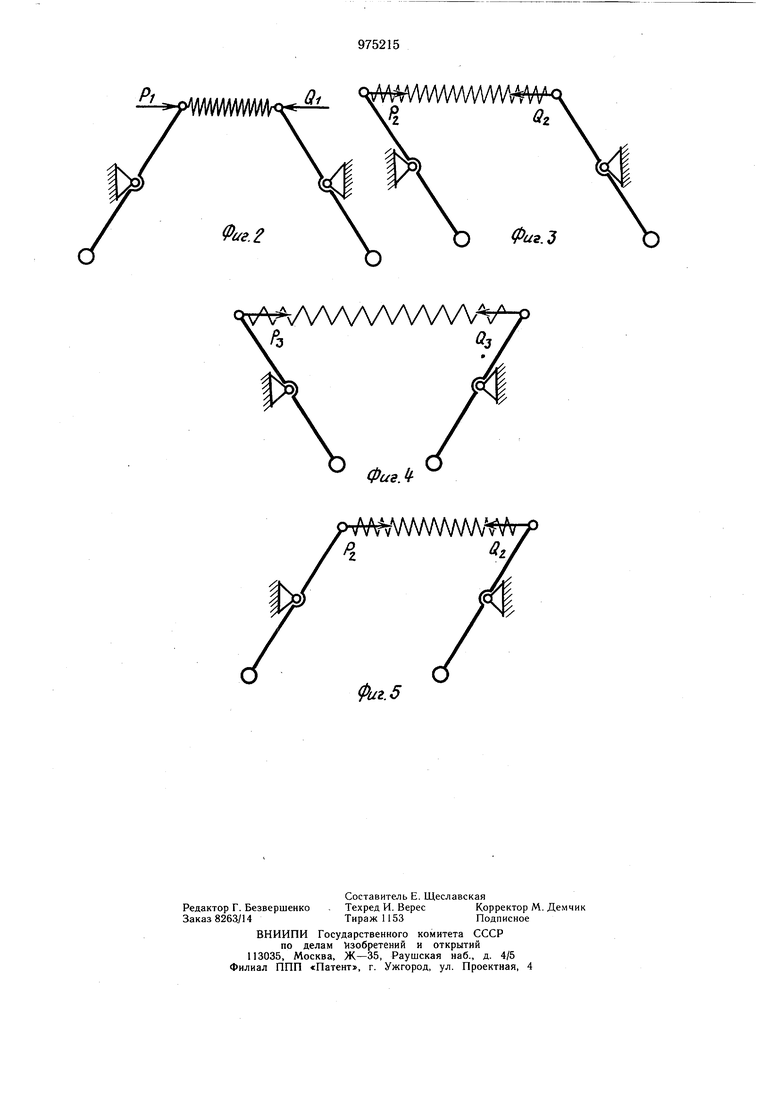
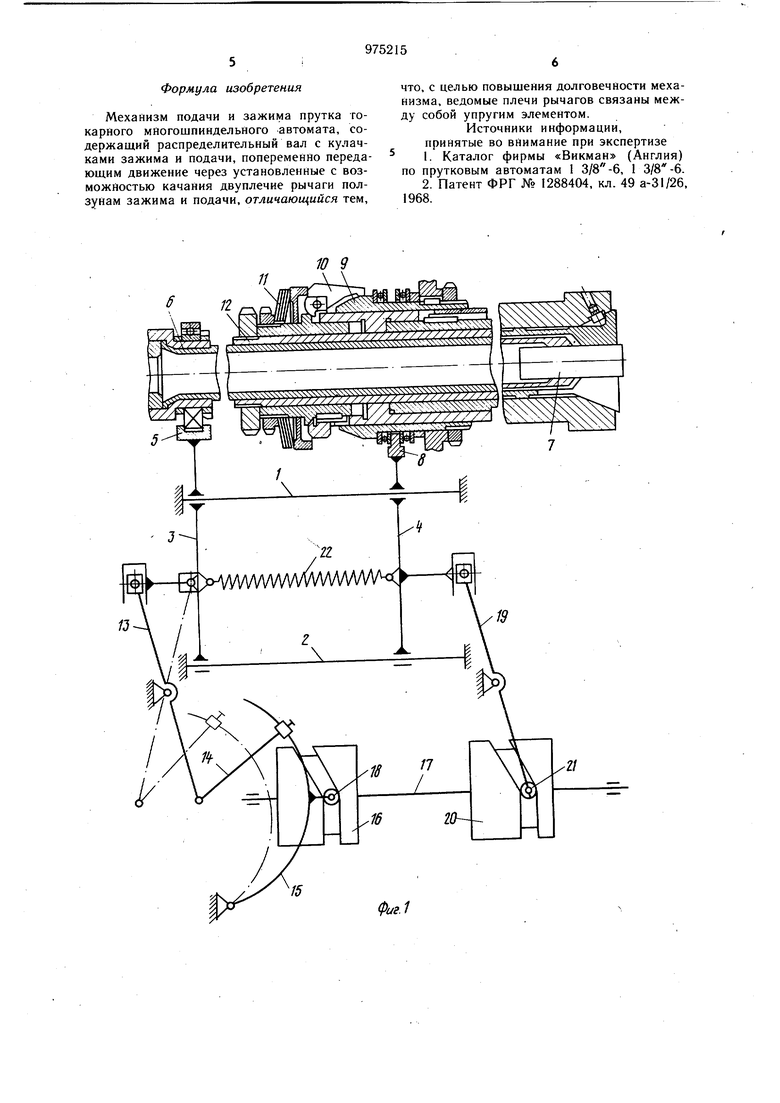
Изобретение относится к станкостроению и предназначено для подачи и зажима прутка токарного многошпийдельйого автомата. Известен механизм подачи прутка токарйого многошпиндельного автомата, в котором во избежание ударов ролик двуплечего рычага, передающего движение от приводного кулачка через ползун к трубам подачи, постоянно прижат пружиной к поверхности паза кулачка. Пружина расположена между ведущим плечом рычага, несущего палец с роликом, и корпусом станка 1. Однако из-за перегрузки силой пружины кинематических пар механизма ролик-кулачок и палец-ролик, постоянно находящихся в относительном движении с трением скольжения и качения, повышается их износ, уменьшается точность величины подачи прутка и снижается долговечность механизма. Наиболее близким к изобретению по технической сущности является механизм зажима прутка токарного многошпиндельного автомата, в котором с целью предупреждения возникновения ударов и снижения нагрузок ролик двуплечего рычага, передающего движение от приводного кулачка через ползун к трубам зажима, постоянно прижат пружиной к поверхности паза кулачка, которая установлена между- ведомым плечом рычага, взаимодействующим с ползуном зажима, и корпусом станка 2. Недостатком известного механизма является его недолговечность, вызываемая излишней перегрузкой пар трения от усилия пружины, изменяющегося от минимального до максимального значения. Цель изобретения - повышение долговечности механизма подачи и зажима прутка. Поставленная цель достигается тем, что в механизме подачи и зажима прутка токарного многощпиндельного автомата, содержащем распределительный вал с кулачками зажима и подачи, попеременно передающим движение через установленные с возможностью качания двуплечие рычаги ползунам зажима и подачи, ведомые плечи рычагов связаны между собой упругим элементом. На фиг. 1 изображена схема механизма подачи и зажима прутка токарного многошпиндельного автомата; на фиг. 2-5 - положения рычагов подачи и зажима, а также действующие на них силы в процессе работы. Механизм подачи и зажима прутка многошпиндельного токарного автомата состоит из закрепленных в корпусе станка направляющих 1 и 2, На которых установлены с возможностью осевого перемещения ползуны подачи 3 и зажима 4. Ползун 3 подачи имеет захват 5, с помощью которого он сообщает поступательное движение трубе 6 подачи, имеющей цангу, и расположенному внутри нее обрабатываемому прутку 7. Ползун 4 зажима своей вилкой 8 может сообщать движение конической втулке 9 муфты зажлма, которая через поворотные рычажки 10, пакет 11 тарельчатых пружин и промежуточные детали передает движение трубе 12 зажима, имеющей цангу, внутри которой также проходит обрабатываемый пруток; Движение ползуну 3 подачи сообщается через двуплечий рычаг 13, соединенный серьгой 14 с качающейся кулисой 15, от цилиндричеокого кулачка 16, закрепленного на распределительном валу 17 и воздействующего на ролик 18 кулисы 15. Изменение величины хода ползуна 3 при изменении длины подачи прутка достигается изменением места крепления конца серьги 14 на кулисе 15. Движение ползуна 4 зажима сообщается через двуплечий рычаг 19 от закрепленного На распределительном валу 17 цилиндрического кулачка 20, взаимодействующего на ролик 21 рычага 19. Ведомые плечи рычагов 13 и 19 связаны между собой с помощью пружины 22 растяжения. Для обеспечения требуемых динамических характеристик механизма сила пружины 22 при его работе должна изменяться в определенных оптимальных пределах. Поэтому при изменении длины подачи прутка, вызывающем изменение угла качания рычага 13, растяжения и максимальной силы пружины, необходимо регулировать силу пружины. Для этого могут быть использованы обычные методы регулировки, Например, при помощи винта, что вполне приемлемо при эксплуатации станка в условиях крупносерий ного и массового производства, где его переналадки производятся редко. Механизм .работает следующим образом. В его исходном положении пруток зажат после окончания его подачи. Этому соответствует положение рычага подачи 14, показанное на фиг. I прерывистыми линиями, а рычага зажима 19 - сплошными линиями. Ролики кулисы 15 и рычага 13 обкатываются по участкам выстоя кулачков 16 и 20, вращающихся вместе с распределительным валом 17. Поэтому рычаги подачи 13 и зажима 19 неподвижны и находятся под действием соответственно сил PI и Qi предварительного натяжения пружины 22. В процессе дальнейщего вращения распределительного вала ролик рычага 19 продолжает находиться на участке выстоя кулачка 20. Ролик кулисы 15 Начинает взаимодействовать с участком движения кулачка 16, поворачивая кулису по часовой стрелке и через серьгу 14 рычаг 13 в противоположном направлении. Рычаг 13 перемещает влево ползун 3 подачи вместе с трубой 6 подачи - происходит набор материала. После окончания набора ролик кулисы 15 выходит на следующий участок выстоя профиля кулачка 16. При этом рычаги 13 и 19 занимают относительно положение, показанное сплощными линиями на фиг. 1, а приложенные к ним силы от растянувщейся пружины возрастают до значений Р и Q. Далее ролик рычага 19 начинает контактировать с участком движения кулачка 20, в результате чего рычаг 19 поворачивается по часовой стрелке, перемещая вправо ползун 4 зажима вместе с подвижной частью муфты зажима - конусной втулкой 9. Происходит разжим прутка. В процессе поворота рычага 19 воздействующая на него сила пружины возрастает в требуемых пределах значений (от Q до Qj), что предотвращает отрыв ролика рычага 19 от поверхности кулачка 20 и возникновение ударов. Одновременно сила, приложенная к рычагу 13, возрастает до значения Р , требуемого в начале подачи прутка. При дальнейщем вращении распределительного вала ролик рычага 19 остается на участке выстоя кулачка 20, обеспечивая Неподвижность рычагу 19, а ролик кулисы 15 начинает контактировать со следующим участком движения кулачка 16. В результате рычаг 13 поворачивается по часовой стрелке, перемещая ползун 3 подачи вправо и обеспечивая подачу прутка. В процессе поворота рычага 13 воздействующая На него сила пружины изменяется в заданных пределах , что препятствует отрыву его ролика от поверхности кулачка 16 и возникновению ударов. После окончания поворота рычага 13 сила пружины, воздействующая на рычаг 19, уменьшается до значения Q. Далее цикл работы механизма повторяется. Благодаря силовому замыканию ведомых плеч рычагов подачи и зажима материала предлагаемый механизм, обеспечивая безударность работы при подаче и зажиме прутка, исключает необоснованную перегруженность Находящихся постоянно в относительном движении с трением скольжения и качения кинематических пар в цепи привода подачи и зажима прутка на значительной части циклового угла работы механизма, что уменьшает их износ, повышает точность подачи и силу зажима в эксплуатационных условиях.
Формула изобретения
Механизм подачи и зажима прутка токарного многошпиндельного автомата, содержащий распределительный вал с кулачками зажима и подачи, попеременно передающим движение через установленные с возможностью качания двуплечие рычаги ползунам зажима и подачи, отличающийся тем, а W AAAAAMM/WW /W A
что. с целью повыщения долговечности механизма, ведомые плечи рычагов связаны между собой упругим элементом.
Источники информации, принятые во внимание при экспертизе
АЛЛЛ/WVW
Фиг л
