(54) ЗАХВАТ ДЛЯ ПОЛЫХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Двурогий крюк | 1980 |
|
SU903279A1 |
| Траверса для подъема и перемещения крупногабаритных тяжеловесных грузов | 1978 |
|
SU767006A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПАКЕТОВ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ | 1996 |
|
RU2105704C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Навесное устройство к крану | 1973 |
|
SU438602A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ШВАРТОВОЧНО-ТАКЕЛАЖНОЕ УСТРОЙСТВО ВЕРТОЛЁТА | 2023 |
|
RU2819338C1 |
Изобретение относифсч к(грузоподъемному оборудованию, в частности к навешиваемым на грузовой крюк крана грузозахватным приспособлениям для изделий с полостями.
Известен захват для полых иэде-i ЛИЙ, содержащий прижимы, шарнирно соединенные посредством осей с распорными элементаг и, размещенные с внутренней стороны прижимов упоры для распорных элементов и приводное устройство прижимов l.
Недостатком известного захвата является низкая надежность в работе.
Цель изобретения - повышение надежности в работе.
Поставленная цель достигается тем, что в захвате упйры установлены на осях и выполнены каждый из двух секторов, соединенных попарно пластиной, установленной с возможностью опирания на нее распорных элементов.
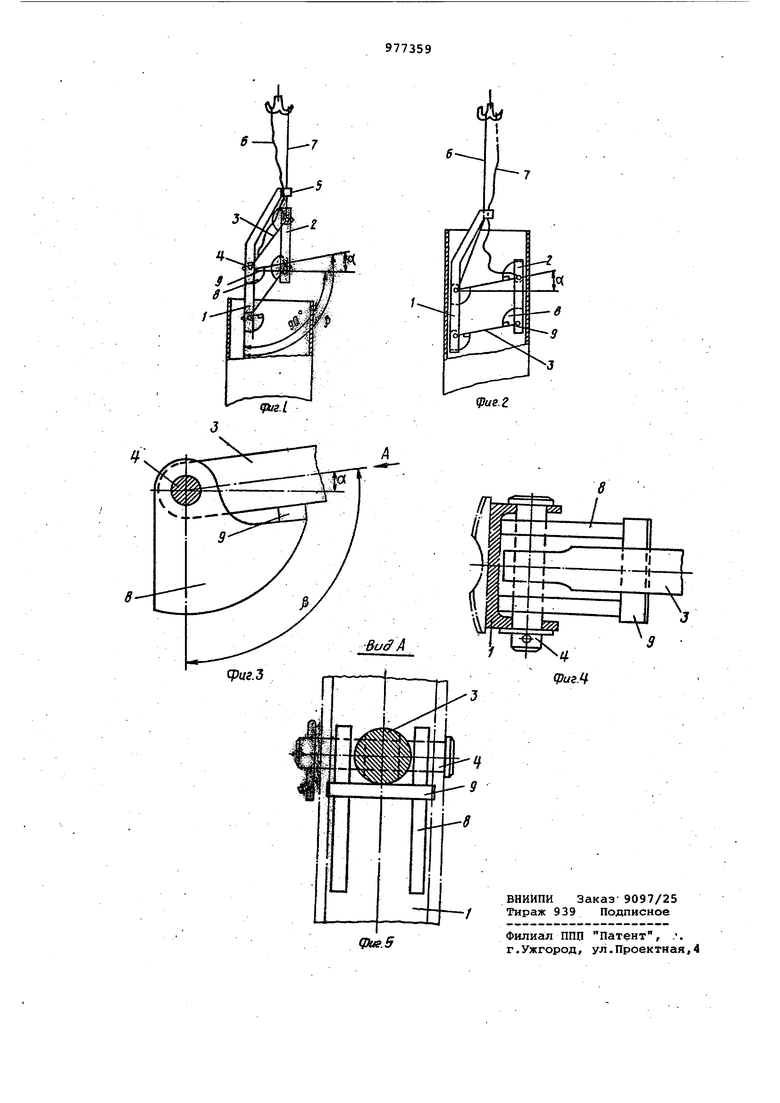
На фиг.1 изображен предлагаемый захват/ исходное положение на фиг.2- то же рабочее положение, при наклоне распорных элементов на критический угол; на фиг.З - упор с распорным элементом и пластиной; на фиг.4 - то же, вид сверху; на фиг.5 - вид по стрелке А на фиг.З.
Захват состоит из прижимов 1 и 2 с зубьями и поперечных распорных элементов 3, соединенных с осями 4. На удлиненном конце прижима 1 закреплено кольцо 5, установленное по оси захвата, через которое пропущены канаты. Грузовой канат 6 прикреплен к прижиму 1, холостой канат 7 к прижиму 2. Петли на свободных кон10цах канатов 6 и .7 навешены на крюк . На осях 4 установлены упоры выполненные в виде секторов 8, соединенных попарно между собой пластинами 9. Центральный угол |Ь секторов 8
15 больше заданного критического угла oL на 90°. Критический угол d- - угол минимального наклона распорных элементов 3 к горизонтали для данного груза. Упоры размещены между прижима20ми 1 и 2 распорными элементами 3 в зоне их сближения при захвате груза. В исходном положении устройство подвешено на холостом канате 7 и находится в сложенном положений. Грузовой
25 канат б длинее холостого каната 7 и поэтому ослаблен (фиг.1).
Захват работает следующим образом.
После ввода устройства внутр1з
30 груза и снятия холостого каната 7 с крюка крана захват оказывается подвеш.нным на грузовом канале 6, самораркрывается, поворачиваясь йа осях 4 распорными элементами 3 и касаясь внутренней поверхности полости зубьями прижимов 1 и 2. При подъеме происходит саморасклинивание устройства. При этом распорные элементы 3 продолжают поворачиваться на осях 4. Если из-эа податливости материала,, например трубы/ или принятия трубой 9Л1ЛИПСОВИДНОЙ формы угол наклона распорных элементов дос тигнет ct, то распорные элементы 3 упрутся в пластины 9,в результате пере хода распорньми элементами критического положения и дальнейшего обратно складывания устройства и его срыва с изделия не произойдет. Если податливость трубы наблюдается по всей ее длине от места контакта эубьев прижимов I и 2 до края трубы, то захвата и, следовательно, подъема трубы не произойдет, Это является допслнительным прелмущ&стпоы.. предлагаемого устройстваг так как происходит автомагическое самоограничение грузоподъ емности (по тяговому усилию на грузовой канат). Еспи захват трубы произошел при угле наклона распсфных элементов 3 больше критического угла (т.е. распорные элементы 3 не достигли еще своего крятического noложения), а при перемеп ении произошел скол материала тру под зубом прижима или труба на участке захёата приняла эллипсовидную фор. распорные элементы 3.повернутся на: осях 4, достигнут своего критического положения и вступят во взаимодействие с пластинами 9 упоров, не . пройдя своего критического положения В результате устр(й1ство не сложит.ся и срыва груза не произойдет. После установки груза на площадку или место мЬнтажа вновь навешива- ют холостой канат 7 на крюк крана (грузовой канат при этом провисает) и поднимают устройство. При подъеме распорные элементы 3 поворачиваются в обратном направлении, устройство склёщывается и вытягивается из трубы. Конструкция упоров может допускать изменение центрального угла (Ь для предварительной настройхи устройства для работы с различными изделиями. Однако,учитывая, что на практике переход на другие изделия могут происходить нечасто, целесообразно предлагаемое устройство укомплектовать набором упоров. Использование предлагаемого устройства обеспечит надежность и безопасность проведения погрузочио-разгрузочных и строительно-монтажных операций с трубами и другими.полыми из-делиями, материал которых подвержен местным повреждениям в местах устройСтва с внутренней поверхностью или которые могут принимать эллипсовидную форму на участке захвата. Формула изобретения Захват из полых изделий, содержаний прижимы, шарнирно соединенные посредством осей с распорными элементами, размещенные с внутренней стороны щ ижимов упоры для распорных элементов и приводное устройство. прижимов отличающийся тем, что, с целью повышения надежности, упоры установлены на упомянутых осях и выполнены каждый из двух секторов, соединенных попарно пластиной, установленной с возможностью опирания на нее распорных элементов. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ W 2805205, кл. В 66 С 1/54, 1980 (прототип).
