(54) СУДОВАЯ ЛЕБЕДКА СЛЕД5ЩЕГО КАНАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовая лебедка | 1958 |
|
SU119446A1 |
| Лебедка для спуско-подъемных операций в море | 1990 |
|
SU1744056A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Швартовая лебедка | 1985 |
|
SU1392020A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Лебедка с трансформатором крутящего момента | 2023 |
|
RU2819462C1 |
| ГАСИТЕЛЬ КОЛЕБАНИЙ ГРУЗА НА СТРЕЛЕ СУДОВОГО КРАНА | 2021 |
|
RU2769024C1 |
| Судовая лебедка | 1978 |
|
SU893694A1 |
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| Т Д -с. и. Василенко, В. А. Межаков, И. Г. Венжега, И. К. Чрпурнов'' '^'^^^ >&!и М. Г. НудельманI Vj ПЛ'/г;:'^; j._I '' ^^^'"'''-?:-:ЛЬ' е;'5,:[;ог:;:л | 1966 |
|
SU186114A1 |
Изобретение относится к подъемшлм устройствам, а именно к судовым ле- / бедкам следящего каната.
Наиболее близким техническим решением к описываемому изобретению является судовая лебедка следящего каната, содержащая канатный барабан, связанный с дйигателем через рабочую гидромуфту и редуктор, а через обгонную муфту - с опорным элементом 13.
Недостатком указанной лебедки является жесткая связь барабана с храповым механизмом, работающим резко, толчками, что приводит к большим динамическим нагрузкам в канате и снижает надежность лебедки.
Целью изобретения является повышение надежности лебедки путем обеспечения постоянства натякения каната в режиме слежения за волной.
Для этого лебедка снабжена ускоряющим редуктором и тормозной гидромуфтой, насосное колесо которой связано с барабаном через ускоряющий редуктор, а турбинное - с обгонной муфтой.
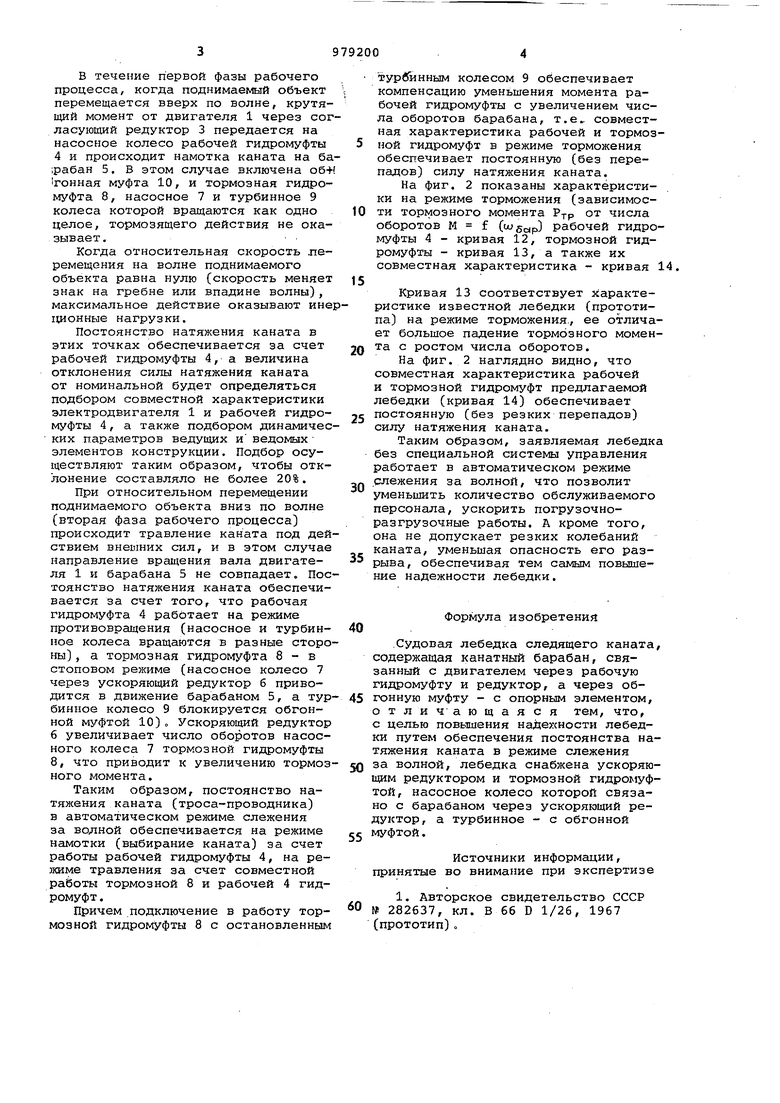
На фиг. 1 схематично изображена судовая лебедка; на фиг. 2 - характеристики (зависимость тормозного момента от числа оборотов) рабочей
и тормозной гидромуфт, а также, их совместная характеристика.
Судовая лебедка содержит связанный с нереверсируемым двигателем 1 через соединительную муфту 2, согласующий редуктор 3 и рабочую гидромуфту 4 канатный барабан 5. Барабан 5 через ускоряющий редуктор 6 связан с насосным колесом 7 тормозtoной гидромуфты 8, турбинное колесо 9 которой через обгонную муфту 10 связано с неподвижным опорным элементом 11 .
15
Следящая судовая лебедка работает следующим образом.
После закрепления свободного конца каната (троса-проводника) (на чертеже не показан) на поднимаемом
20 объекте (малое судно или лихтер) включают приводной двигатель 1, работакиций всегда на выбирание каната. При этом производится выбирание слабины каната до тех пор, пока оборо25ты двигателя не достигнут номинального значения, после чего начинается процесс работы лебедки в автоматическом режиме слежения за волной, состоящем из двух фаз; выбирание и
30 травление каната (троса-проводника).
В течение первой фазы рабочего процесса, когда поднимаемый объект перемещается вверх по волне, крутящий момент от двигателя 1 через согласующий редуктор 3 передается на насосное колесо рабочей гидромуфты 4 и происходит намотка каната на ба,рабан 5. В этом случае включена об-Н сгонная муфта 10, и тормозная гидромуфта 8, насосное 7 и турбинное 9 колеса которой вращаются как одно целое, тормозящего действия не оказывает,
Когда относительная скорость .перемещения на волне поднимаемого объекта равна нулю (скорость меняет знак на гребне или впадине волны), максимальное действие оказывают ине1Ц1онные нагрузки.
Постоянство натяжения каната в этих точках обеспечивается за счет рабочей гидромуфты 4, а величина отклонения силы натяжения каната от номинальной будет определяться подбором совместной характеристики электродвигателя 1 и рабочей гидромуфты 4, а также подбором динамических параметров ведущих и ведомых элементов конструкции. Подбор осуществляют таким образом, чтобы отклонение составляло не более 20%.
При относительном перемещении поднимаемого объекта вниз по волне (вторая фаза рабочего процесса) происходит травление каната под действием внешних сил, и в этом случае направление вращения вала двигателя 1 и барабана 5 не совпадает. Постоянство натяжения каната обеспечивается за счет того, что рабочая гидромуфта 4 работает на режиме противовращения (насосное и турбинное колеса вращаются в разные стороны) , а тормозная гидромуфта 8 - в стоповом режиме (насосное колесо 7 через ускоряющий редуктсэр 6 приводится в движение барабаном 5, а турбинное колесо 9 блокируется обгонной муфтой 10)о Ускоряющий редуктор 6 увеличивает число оборотов насосного колеса 7 тормозной гидромуфты 8, что приводит к увеличению тормозного момента.
Таким образом, постоянство натяжения каната (троса-проводника) в автоматическом реясиме слежения за волной обеспечивается на режиме намотки (выбирание каната) за счет работы рабочей гидромуфты 4, на резкиме травления за счет совместной работы тормозной 8 и рабочей 4 гидромуфт .
Причем подключение в работу тормозной гидромуфты 8 с остановленнБ1М
турЙГинным колесом 9 обеспечивает компенсацию уменьшения момента рабочей гидромуфты с увеличением числа оборотов барабана, т.е.. совместная характеристика рабочей и тормозной гидромуфт в режиме торможения обеспечивает постоянную (без перепадов) силу натяжения каната.
На фиг. 2 показаны характеристики на режиме торможения (зависимости тормозного момента Ртр от числа оборотов М f (wgcjp) рабочей гидромуфты 4 - кривая 12, тормозной гидромуфты - кривая 13, а также их совместная характеристика - кривая 14,
Кривая 13 соответствует характеристике известной лебедки (прототипа) на режиме торможения., ее отличает большое падение тормозного момента с ростом числа оборотов.
На фиг. 2 наглядно видно, что совместная характеристика рабочей и тормозной гидромуфт предлагаемой лебедки (кривая 14) обеспечивает 5 постоянную (без резких перепадов) силу натяжения каната.
Таким образом, заявляемая лебедка без специальной системы управления работает в автоматическом режиме слежения за волной, что позволит уменьшить количество обслуживаемого персонсша, ускорить погрузочноразгрузочные работы. А кроме того, она не допускает резких колебаний каната, уменьшая опасность его разрыва, обеспечивая тем самым повышение надежности лебедки.
Формула изобретения
.Судовая лебедка следящего каната, содержащая канатный барабан, связанный с двигателем через рабочую гидромуфту и редуктор, а через обгонную муфту - с опорным элементом, отличающаяся тем, что, с целью повышения надежности лебедки путем обеспечения постоянства натяжения каната в режиме слежения
за волной, лебедка снабжена ускоряющим редуктором и тормозной гидромуфтой, насосное колесо которой связано с барабаном через ускоряющий редуктор, а турбинное - с обгонной
муфтой.
Источники информации, принятые во внимание при экспертизе
fJVfap
Фиг. г
