Изобретение относится к механизации и автоматизации вспомогательных операций в машиностроительном и приборостроительном производствах, ..а именно к захватным устройствам манипуляторов, предназначенных для автоматизации технологических процессов при сборке круглых ферромагнитных деталей, их поштучной загрузке и выгрузке.
Известен электромагнитно-механический схват манипулятора, содержащийэлектромагнит, подвижные губки, установленные с возможностью возвратно-вращательного движения, привод их перемещения и механизм вращения электромагнита 1.
Недостатком такого схвата является сложность конструкции.
Целью изобретения является -упрощение конструкции схвата.
Поставленная цель достигается тем, что в электромагнитном схвате, содержащем электромагнит, привод его вращения и механическое ориентирующее устройство, последнее выполнено в виде втулки с внутренней конической поверхностью, установленной соосно с электромагнитом.
На фиг. 1 показан схват, общий вид; на фиг. 2 - вид А на фиг. 1.
На руке 1 манипулятора установлен электромагнит 2 и привод 3, обеспечивающий вращение магнита. На руке 1 неподвижно к сооско с электромагнитом 2 установлена втулка 4 с внутренней конической поверхностькх. Переносимая деталь обозначена позицией 5.
Электромагнитный схват работает следующим образом.
При прохождении схвата над позицией захвата электромагнит 2 включается и притягивает деталь 5.3а счет погрещности установки детали на позиции захвата деталь, притянутая электромагнитом, устанавливается несоосно с электромагнитом и опирается частично на коническую поверхность
0 втулки ,4. Во время перемещения руки со схватом к позиции установки детали на технологическое оборудование производится непрерывное вращение электромагнита 2 приводом 3. При этом силы трения, приложенные к детали от нижней поверхности электромагнита 2 и от конической поверхности втулки 4, образуют пару сил, за счет которой деталь, вращаясь, полностью смещается на .поверхность электромагнита и устанавливается соосно с ним. После того,
0 как рука 1 манипулятора переместит схват в требуемое место пространства, электромагнит 2 выключается и освобождает переносимую деталь.
Использование предлагаемой конструкции схвата позво,дяет захватывать перено- . симую деталь без остановки руки и устанавливать ее в заданное место с обеспечением необходимой точности позиционирования, а выполнение ориентирующего устройства в виде втулки с внутренней конической по верхностью обеспечивает упрощение конструкции схвата.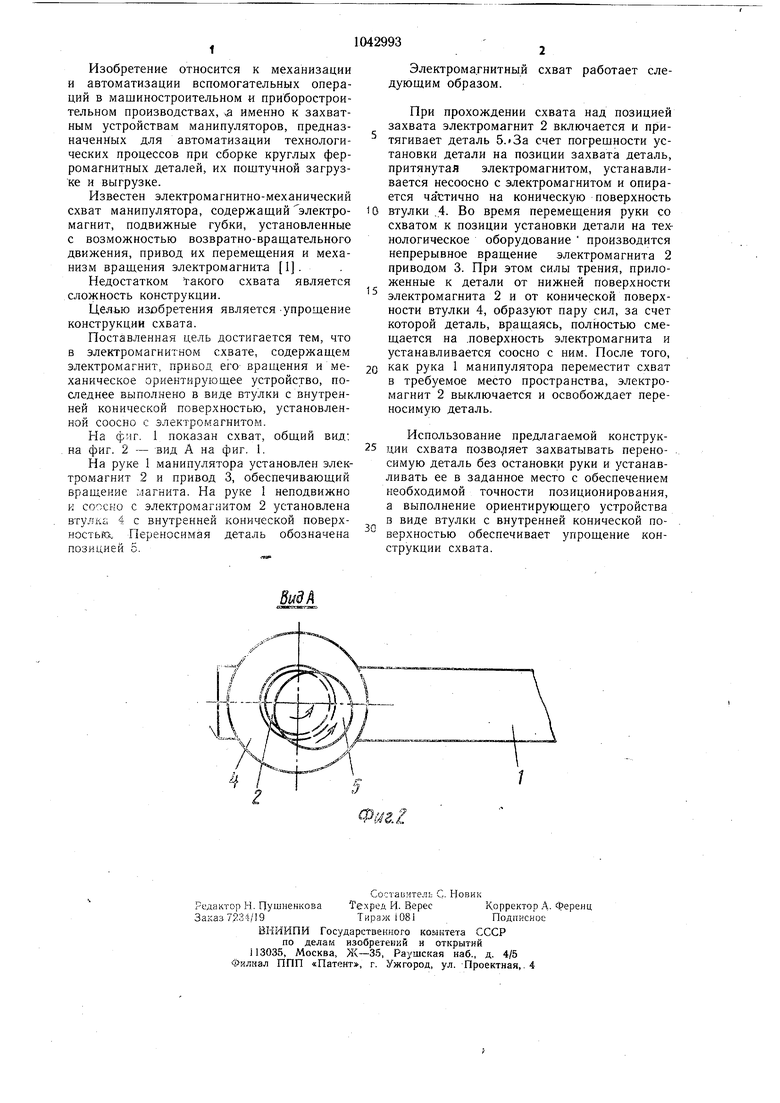
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Электромагнитное захватное устройство манипулятора | 1988 |
|
SU1641611A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Электромагнитный поворотный захват манипулятора для ферромагнитных деталей | 1978 |
|
SU747716A1 |
| Роботизированный технологический комплекс | 1985 |
|
SU1294601A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий электромагнит, привод его вращения и механическое ориентирующее устройство, отличающийся тем, что, с целью упрощения конструкции, ориентирующее устройство выполнено в виде втулки с внутренней конической поверхностью, установленной соосно с электромагнитом. (Л Nt; ГС со ;о оо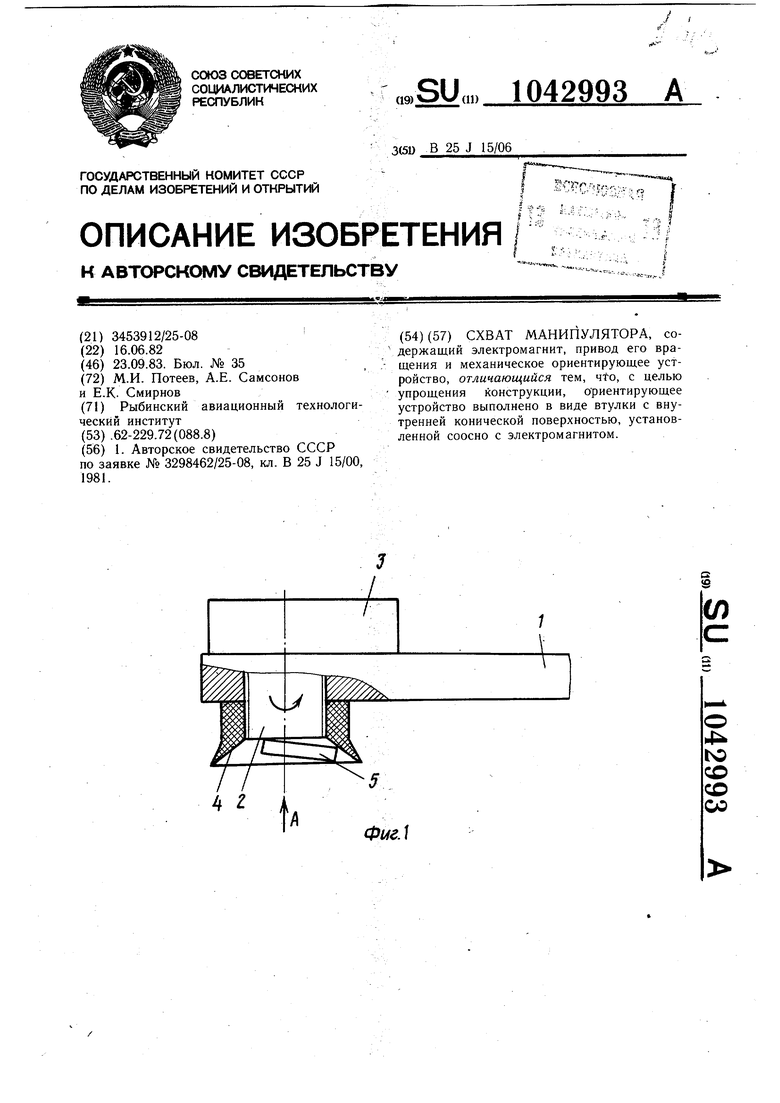
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3298462/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
