(54) СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Система управления | 1978 |
|
SU697974A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
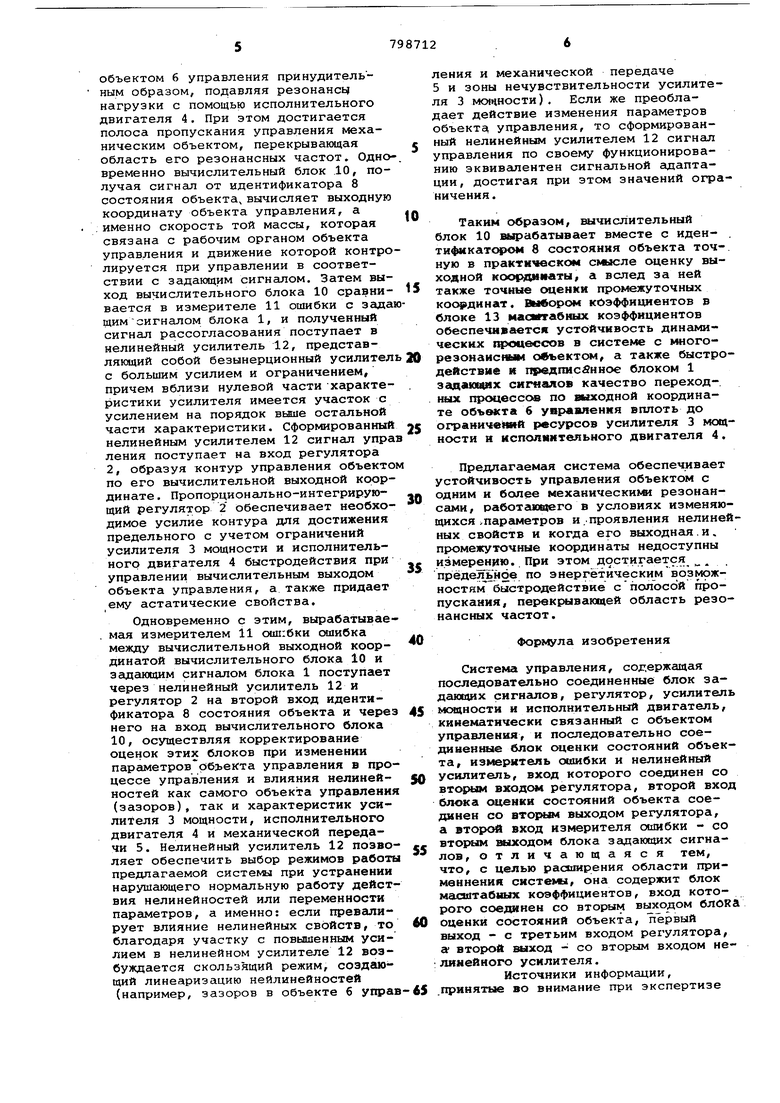
Изобретени1е относится к системам автоматического управления, в частности к следящим системам, объектом которых является исполнительный двигатель с нагрузкой на валу, и может быть использовано для управления эле тромеханическим объектом, в том числ с упругими связями и зазорг№ш, когда выходные и промежуточные координаты нагрузки не все доступны измерению с помощью датчиков,например в станко строении в системах управления механизмами металлорежущих станков. Известны следящие системы, содержащие последовательнр соединенные измеритель рассогласЪвания, регулятор и объект регулирования, вход и выход которого соединены с соответствующими входами устройства для измерения текущих динамических характеристик нестационарного объекта (идентификатором), выход которого соединен со вторым входом регулятора i;i и 2. Известны также следящие систекы, содержащие последовательно соединен ные задатчик, измеритель рассогласо вания, регуляторИ объект, выход которого соединен с первым входом сумматора, второй вход которого чео эталонную кюдель соединен с выходом задатчика, а выход через устройство управления с бесконечно большим коэффициентом усиления и ограничением соединен со вторым входом регулятора. В такой системе сравнивают реальные выходные координаты объекта с желаемыми, а по их разности формируется дополнительный сигнал управления 3. Наиболее близкой по технической сущности к предлагаемому техническому решению является самоиастраивакяцая система, содержащая последовательно соединенные блок задающих сигналов, рагулятор, усилитель мощности и исполнительный двигатель, кинематически связанный с объектом управления, и последовательно соединенные блок оценки состояний объекта, измеритель ошибки и нелинейный ус|1литель, вход которого соединен со вторым входом регулятора, второй вход блока оценки состоянийобъекта соединен со вторым выходом регулятора, а второй вход измерителя ошибки - со вторым выходом блока задающих сигналов 4j. Недостатком известной системы является то, что при работе с объектом управления, соединенным с исполнительным двигателем с помощью механической передачи е упругой связью и зазором, система становится неработо способной. Цель изобретения - расширение области применения системы для управле ния объектом, у которого выход и промежуточные координаты нагрузки недоступны измерению, путем подавления резонансных колебаний объекта управления и расширения полосы пропускания за границу области резонанс ных частот. Поставленная цель достигается тем что система управления содержит блок масштабных коэффициентов, вход которого соединен со вторым выходом блок оценки состояний объекта, первый выход - с третьим входом регулятора, а второй выход - со вторым входом нели нейного усилителя. При этом организовывается два кон тура управления объектом управления, координаты нагрузки которого .недосту ны измерению. Первый, внутренний, ко тур управления по состоянию объекта образованным регулятором, усилителем мощности и исполнительным двигателем с датчиком скорости, замкнутым через блок оценки состояния объекта и блок масштабных коэффициентов, чем обеспечивается устойчивость и быстродействие при управлении объектом на основе восстановления блоком оценки состояния (п-1) независимых переменных объекта, где п - общий порядок дифференциальных управлений объекта. Восстановление (оценка) недоступных для непосредственного измерения координат объекта управления по выходному сигналу исполнительного двигателя возможно потому, что в сигнал скорости двигателя содержится информация о динамических процессах в объекте управления, накладывающихся в виде обратной реакции на движение вала двигателя вследствие неоднонаправленных свойств механической передачи. .. Второй, внешний, контур управлени по вычислительному значению выходной координаты объекта управления образу регулятор, усилитель мощности, исполнительный двигатель, замкнутые через блок оценки состояния объекта измеритель ошибки и нелинейный усилитель. В контуре осуществляется уп1 авление с обратной связью по той вычислительной координате объекта управления, которая в процессе управ ления следуетсвоему эталонному назначению, предписываемому блоком задающих сигналов. Таким образом, блок оценки состояния объекта на основе информации об (п-1) независимых Переменных состояния объекта, управления формирует независимую переменную, пропорциональную или равную той физической координате объекта, которая контролируется в про цессе управления, приобретая скисл выходной координаты (выхода) объекта управления. Блок задающих сигналов вьадает на регулятор командный сигнал, а на измеритель ошибки эталонный сигнал выходной координаты объекта управления, вырабатываемый в нем с помощью эталонной модели системы. Блок оценки состояний объекта состоит из датчика скорости, иденти фикатора, определяющего (п-1) независимую переменную состояния объекта, и вычислительного блока, определяющего по известным (п-1) переменным состояния выходную координату объекта управления. На чертеже приведена функциональная схема предлагаемой система управления объектом с недоступным измерению выходом. Схема содержит блок 1 задающего сигнала, регулятор 2, усилитель 3 мощности, исполнительный двигатель 4, механическая передача 5, объект 6 управления, блок 7 оценки состояний Объекта, идентификатор 8 состояния объекта, датчик 9 скорости, вычислительный блок 10, измеритель 11 ошибки, нелинейный усилитель 12 и блок 13 масштабных коэффициентов. Система управления работает следующим образом. Блок задгиощего сигнала вырабатывает командный сигнал, который через регулятор 2, усилитель 3 мощности, исполнительный двигатель 4 и механическую передачу 5 передается на объект 6 управления, в котором возбуждаются резонансные колебания. Для обеспечения быстродействия и устойчивой отработки объектом управления задающего сигнала идентификатор 8 состояния объекта, получая сигнал от датчика 9 скорости исполнительного двигателя 4, на скорость которого ввиду обратной .реакции механической передачи накладываются колебания объекта управления вырабатывает недоступные измерению (2п-1) независимых координат объекта управления, имеющего п степеней свободы, именно: m упругих моментов, соответствулсвдих m упругим резонансам, и т-1 обобщенных скоростей. Если объект управления однорезонансный (имеет одну степень свободы) , то восстанавливается один упругий момент. Выход идентификатора .8 состояния подается в блок 13 масштабных 1Й зффициентов, формирующего линейную комбинацию с заданными весовыми коэффициентами сигналов, вырабатываемых идентификатором 8 состояния объекта. Сформированный блоком 13 масштабных коэффициентов сигнал через регулятор 2, усилителя мощности 3, исполнительный двигатель 4 и механическую передачу управляет объектом 6 управления принудительным образом, подавляя резонансу нагрузки с помощью исполнительного двигателя 4. При этом достигается полоса пропускания управления механическим объектом, перекрывающая область его резонансных частот. Одно временно вычислительный блок .10, получая сигнал от идентификатора 8 состояния объекта,вычисляет выходную координату объекта управления, а . именно скорость той массы, которая связана с рабочим органом объекта управления и движение которой контро лируется при управлении в соответствии с задакяцим сигналом. Затем выход вычислительного блока 10 сравни вается в измерителе 11 ошибки с зада щим сигналом блока 1, и полученный сигнал рассогласования поступает в нелинейный усилитель 12, представляющий собой безынерционный усилител с большим усилием и ограничением, причем вблизи нулевой части характе ристики усилителя имеется участок с усилением на порядок вьлие остальной части характеристики. Сформированный нелинейным усилителем 12 сигнал упра ления поступает на вход регулятора 2, образуя контур управления объекто по его вычислительной выходной координате . Пропорционально-интегрирующий регулятор 2 обеспечивает необходимое усилие контура для достижения предельного с учетом ограничений усилителя 3 мощности и исполнительного двигателя 4 быстродействия при управлении вычислительным выходом объекта управления, а также придает ему астатические свойства. Одновременно с этим, вырабатывае мая измерителем 11 ошибки ошибка между вычислительной выходной координатой вычислительного блока 10 и задающим сигналом блока 1 поступает через нелинейный усилитель 12 и регулятор 2 на второй вход идентификатора 8 состояния объекта и через него на вход вычислительного блока 10, осуществляя корректирование оценок этих блоков при изменении параметров рбъекта управления в процессе управ1ления и влияния нелинейностей как самого объекта управления (зазоров), так и характеристик усилителя 3 мощности, исполнительного двигателя 4 и механической передачи 5. Нелинейный усилитель 12 позволяет обеспечить выбор режимов работы предлагаемой системы при устранении нарушающего нормальную работу действия нелинейностей или переменности параметров, а именно: если превалирует влияние нелинейных свойств, то благодаря участку с повышенным усилием в нелинейном усилителе 12 возбуждается скользящий режим, создающий линеаризацию нейлинейностей (например, зазоров в объекте 6 управ ления и механической передаче 5 и зоны нечувствительности усилителя 3 мощности). Если же преобладает действие изменения параметров объекта управления, то сформированный нелинейным усилителем 12 сигнсш управления по своему функционированию эквивёшентен сигнальной сщаптации, достигая при этом значений ограничения. Таким образом, шлчислительный блок 10 вырс1батывает вместе с иден- , тификатсфом 8 состояния объекта точную в практическом смысле оценку выходной кооряиматы, а вслед за ней также точные оценки промежуточных косфдннат. Выбсчйом коэффициентов в блоке 13 маснтабных коэффициентов обеспечивается устойчивость динамических tqpouecooB в системе с иногорезонаисяым объектом, а также быстродействие и предписанное блоком 1 задаюе х сигналов качество переходных процессов по выходной координате объекта 6 управления вплоть до ограничений ресурсов усилителя 3 мощности и исполмктельного двигателя 4. Предлагаемая система обеспечивает устойчивость управления объектом с одним и более механическим резонансами, работгшж го в условиях изменяющихся параметров и.проявления нелинейных свойств и когда его выходнги1.и. промежуточные координаты недоступны измерению. При этом достигается прёдельное по энергетическим возможностям быстродействие с полосой пропускания, перекрывающей область резонансных частот. Формула изобретения Система управления, содержащая последовательно соединенные блок задакпшх сигналов, регулятор, усилитель мощности и исполнительный двигатель, кинематически связанный с объектом управления, и последовательно соединенною блок оценки состояний объекта, измеритель ошибки и нелинейный усилитель, вход которого соединен со вторым входом регулятора, второй вход блока оценки состояний объекта соединен со вторым выходом регулятора, а второй вход измерителя ошибки - со вторым выходом блока задаюсцих сигналов, отличающаяся тем, что, с целью расширения области применнения сястелллг она содержит блок масштабных коэффициентов, вход которого соединен со вторым выходом блока оценки состояний объекта, пЪрвый выход - с третьим входом регулятора, а второй выход - со вторым входом нелинейного усилителя. Источники информации, принятые во внимание при экспертизе
