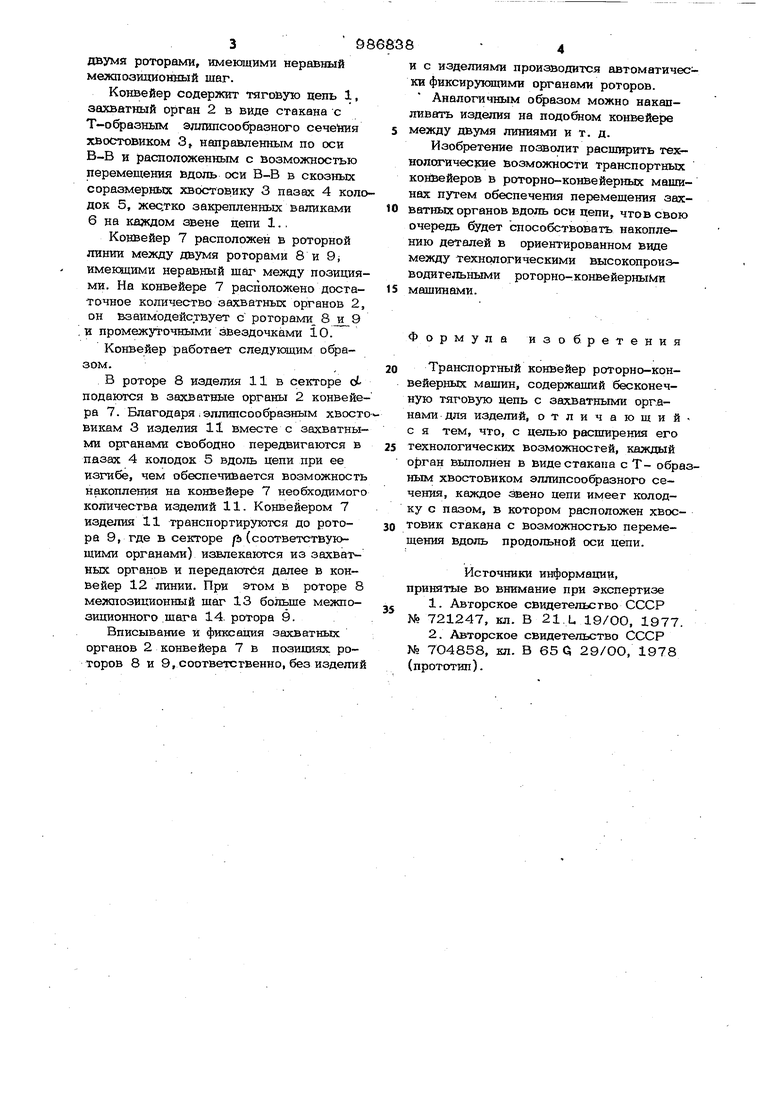
Изобрегение относится к подъемнотранспортному машинострое1Ешю а именно к транспортным конвейерам, применяющимся в роторно-конвейерных машинах и линиях поштучного транспортирования различных изделий в ориентированном виде. Известна роторная автоматическая линия сборки втупочно- роликовой цепи, содержащей роторы, цепной транспортер с базовыми для сборки колодками и дополнительный цепной транспортер со ступенчатыми штырями, при этом по меныией мере одна пара этих штырей имеет большую высоту, чем ocranbHbieCl Ближайшим техническим решением к данному изобретению является транспорт ный конвейер роторно-конвейерных машин содержащий .бесконечную тяговую цепь с захватными органами для изделий C2J Недостатком изветного конвейера является невозможность накапливания и&делий вплотную одно к другому, принятия и передачи изделий на разных .шаговых расстояниях между захватны,ми органами роторов, что сужает технологические возможности конвейера. Целью изобретения является расшире ние технологических возможностей транспортного конвейера. Указавшая цель достигается тем, что в транспортном конвейре роторно; конвейерных машин, содержащем беско- . нечную тяговую цепь с захватными органами для изделий, каждый орган выполнен в виде стакана с Т-образным хвостовиком эллшгсообразного сечения, пpиэi bм каждое звено цепи имеет колодку с пазом, в котором расположен хвостовик стана- на с возможностью перемещения вдоль продольной ос,и цепи. На фиг. 1 изображен участок транспортного конвейера, вид сверху; на фиг. 2 - разрез А-А на фиг. If на фиг. 3 - сечение Б-Б на, фиг. 2; на фиг. 4 - схема, вид сверху; пример использования конвейера в линии между 3 9 двумя роторами, имеющими неравный мелшозидионный шаг. Конвейер содержит тяговую цепь 1, захватный орган 2 в виде стакана с Т-офазным эллипсообразного сечейия хвостовиком 3, направленным по оси В-В я расположенным с возможностью перемеЕюния вдоль оси В-В в скозных соразмерных хвостовику 3 пазах 4 коло док 5, жес,тко закрепленных валиками 6 на каждом звене депи 1.. Конвейер 7 расположен в роторной линии между двумя роторами 8 и 9; имеющими неравный шаг между позиция ми. На конвейере 7 расположено достат очное количество а ахв атных орг анов 2, он взаимодействует с роторами 8 ,и промежуточными звездочками io. Конвейер работает следующим образом. В роторе 8 изделия 11 в секторе oL подаются в захватньш органы 2 конвейе ра 7. Благодаря эллипсообразным хвост викам 3 изделия 11 вместе с захватны ми органами свободно передвигаются в пазах 4 колодок 5 вдоль цепи при ее изгтгбё, чем обеспечивается возможность накопления на конвейере 7 необходимог количества изделий 11. Конвейером 7 изделия 11 транспортируются до ротора 9, где в секторе р (соответствук щими органами) извлекаются из захватных органов и передаются далее в конвейер 12 линии. При этом в роторе 8 межлозиционный шаг 13 больше межпозиционного .шага 14. ротора 9. Вписывание и фиксация захватных органов 2 конвейера 7 в позициях роторов 8 и 9, соответственно, без издели И С изделиями производится автоматически фиксирующими органами роторов. Аналогичным образом можно накапливать изделия на подобном конвейере между двумя линиями и т. д. Изобретение позволит расширить тех- нолагичес}ше возможности транспортных конвейеров в роторно-конвейерных машинах путем обеспечения перемещения захватных органов вдоль оси цепи, что в свою очередь будет способствовать накоплению деталей в ориентированном виде между технологическими высокопроизводительными роторно-конвейерныК1и машинами. Формула изобретения Транспортный конвейер роторно-конвейерных машин, содержащий бесконечную тяговую цепь с захватньпуга органами для изделий, отличающийс я тем, что, с целью расширения его технологических возможностей, каждый орган вьшолнен в виде стакана с Т- образным хвостовиком эллипсообразного се- чешш, каждое звено цепи имеет колодку с пазом, В котором расположен хвостовик стакана с возможностью перемещения вдоль продольной оси цепи. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 721247, кл. В 21.L 19/00, 1977. 2.Авторское свидетельство СССР № 7О4858, кл. В 65 Q 29/ОО, 1978 (прототип).
Фиг. /
4А
11
ife
фуг, I
S-ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1982 |
|
SU1027114A1 |
| Автоматическая роторно-конвейерная машина для сборки пильных цепей | 1986 |
|
SU1409403A1 |
| Роторно-конвейерная линия | 1991 |
|
SU1821334A1 |
| Цепной грузонесущий конвейер | 1980 |
|
SU939345A1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Транспортирующее устройство роторно-конвейерной машины | 1982 |
|
SU1074777A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Транспортный ротор для перемещенияшТучНыХ издЕлий | 1979 |
|
SU841907A1 |
| Роторно-конвейерная машина для сборки пильной цепи | 1981 |
|
SU1042871A1 |
| Роторно-конвейерная машина для сборки цепей | 1981 |
|
SU948059A1 |


