СО
4 со
11423492
зобретение относится к гидранливаны но от ос мо уп на че сл ме
20
25
ческим и пневматическим устройствам для управления тормозом подъемных машин одноконцевого подъема и может - быть .использовано в гонорудной промышленности, .
Целью изобретения является упрощение устройства.
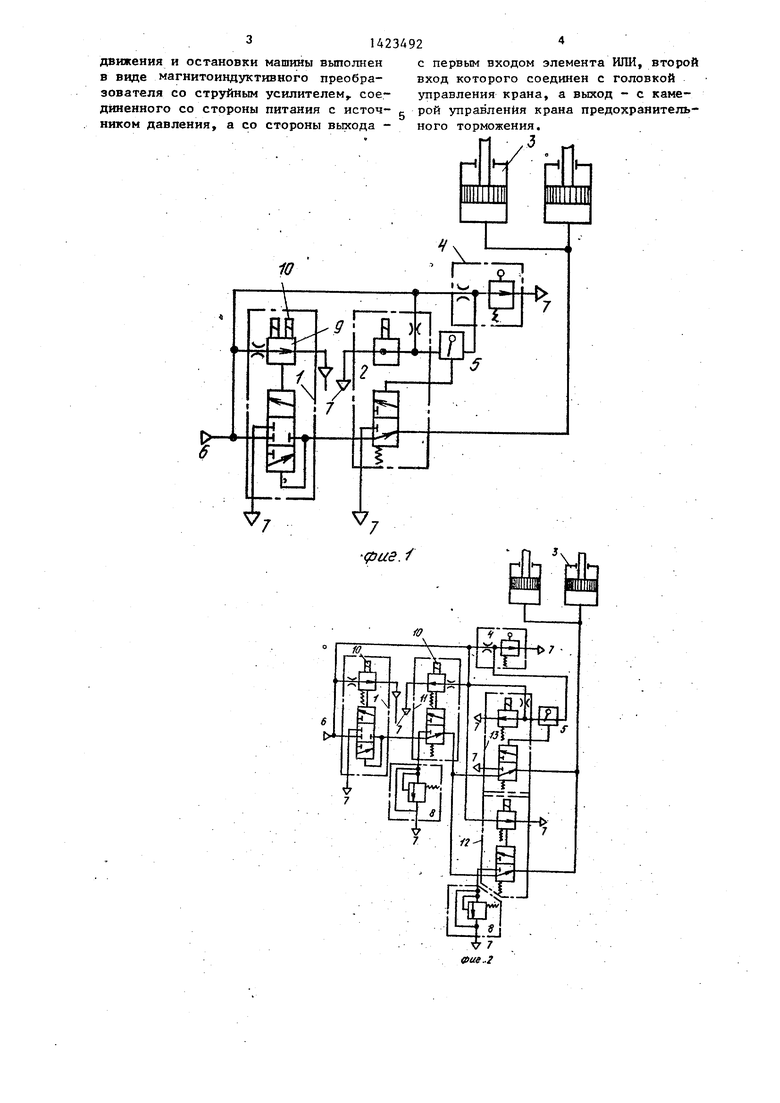
На фиг, 1 представлена принципи- fO альная схема тормозной системы подъемной машины с одним краном (клапаном) предохранительного торможения; на фиг, 2 - пример выполнения схемы тормозной системы с тремя кранами 15 (клапанами) предохранительного торможения , .
Тормозное устройство (фиг, 1) содержит регулятор 1 давления, кран (клапан) 2 предохранительного торможения, тормозные цилиндры 3, датчик 4 напранления вращения и остановки машины, элемент ИЛИ 5, Нагнетательная полость регулятора 1 давления подключена к источнику 6 давления, сливная - к сливу 7, распредетштелъ- ная - к нагнетательной полости крана 2 распреде лительная полость крана 2 соединена с подпоршневой полостью тормозных цилиндров 3, сливная - со сливом 7, I Регулятор 1 давления и кран 2 управляются с помощью злектромагнит- |Ных головок 8 со струйным усилителем, причем головка 9 управления, регуля- 35 тора давления снабжена двумя электромагнитами 10; один - для плавной регулировки давления от нуля до но - минального, второй - для создания Ьервой стзшени давления при отключе- ии головки 9,
Датчик 4 направления движения и установки машины связйн кинематически с валом йодьемной машины и выпол- iieH в виде магнитоиндуктивного пре- Образователя со струйным усилителем И реализует функцию
30
40
0
5
-
O 5
5
0
0
Кран 11 (фиг.2) включен последовательно в общую цепь, а нагнетательные и распределительные полости кранов 12 и 13 соединены между собой, В отличие от схемы по фиг,1 сигнал от датчика 4 направления движения и остановки машины через элемент ИЛИ 5 может быть подан только на камеру управления крана 13, Кран 13 предназначен для ускоренного выпуска рабочего тела, а краны И и 12 имеют на сливе регулирующие устройства для замедленного выпуска рабочего тела.
Устройство работает следующим образом.
При движении машины вверх и частоте вращения п п,, отключение электрической цепи управления предохранительного тормоза приводит к отключению только регулятора 1 давления и наложению первой ступени торможения. Кран 2 остается включенным за счет сигнала давления, поступающего от датчика 4, При частотах вращения п п срабатьшает кран 2, полностью вьшускающий рабочее тело из цилиндра 3 и накладывающий тормозной момент.
Отличия в работе устройства по фиг, 2 от работы по фиг, 1 следукядие: при предохранительном торможении различные режимы торможения обеспечиваются кранами 12 и 13, При п э п тор можение менее интенсивное за счет замедленного слива рабочего тела через регулирующее устройство крана 12 (кран J3 не отключен). При п п торможение интенсивное за счет слива рабочего тела через кран 13. Кран 11 исключает из работы при предохранительном торможении регулятор 1 давления 1, а также дублирует работу крана 12 в случае его отказа,
Кроме того, осуществляется двух- зонное регулирование процесса предохранительного торможения.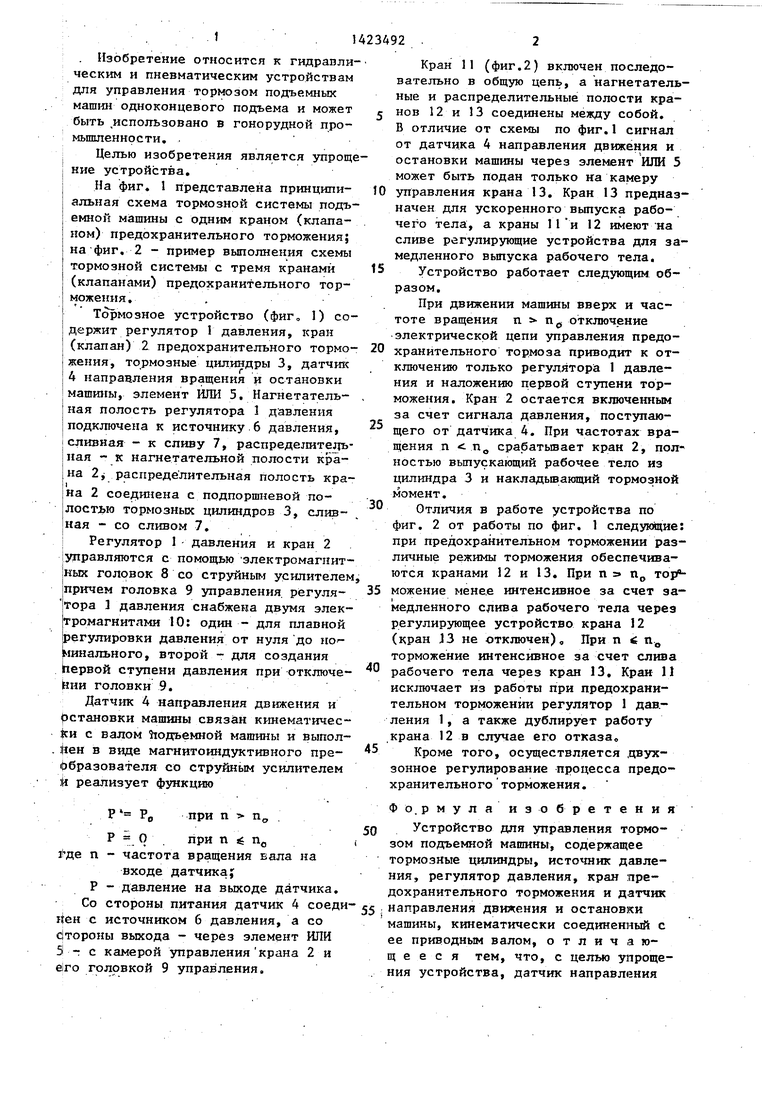
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
| Гидравлическое устройство дляупРАВлЕНия ТОРМОзОМ пОд'ЕМНыХМАшиН | 1979 |
|
SU812704A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
Изобретение относится к гидравлическим и пневматическим устройствам для управления тормозом подъемных машин однокондевого подъема и может быть использовано, в горнорудной промышленности. Цель изобретения - упрощение устройства. Устройство для управления тормозом подъемной машины содержит тормозные цилиндры, источник давления,.регулятор давления, кран предохранительного торможения и датчик направления движения и остановки машины, кинематически соединенной с ее валом. Датчик направления движения и остановки машины выполнен в виде магнитоиндуктив- ного преобразователя со струйным усилителем, соединенного со стороны питания с источником давления, а со стороны выхода с первым входом элемента ИЛИ, второй вход которого соединен с головкой управления, а выход - с камерой управления крана предохранительного торможения. 2 ил. (
Р Р
О
при п п
при п If Пд
п - частота вращения вала на
входе датчикаJ
Р - давление на выходе датчика Со стороны питания датчик 4 Йен с источником 6 давления, а со с|тороны выхода - через элемент ИЛИ 3 -г с камерой управления крана 2 и е1го головкой 9 управления.
Ф о.рмулаиз обретения
50 Устройство для управления тормозом подъемной машины, содержащее тормозные цилиндры, источник давления, регулятор давления, кран предохранительного торможения и датчик соеди- , направления движения и остановки
машины, кинематически соединенный с ее приводным валом, отличающееся тем, что, с целью упроще- . ния устройства, датчик направления
. 31423А92
движения и остановки машины вьтолнен с первым входом элемента ИЛИ, второй в виде магиитоиндуктивного преобра- вход которого соединен с головкой зователя со струйным усилителем сое- управления крана, а выход - с каме- диненного со стороны питания с источ- g рой управления крана предохранитель- ником давления, а со стороны выхода - но го торможения.
.3
/
I
ifc
г
4
.3
/
)с
о
S-,
я
V
. /
fy
10
Ф/
ГАД
г&т
ж
т
1
tr
Г
/J}
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
