(54) РУКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Манипулятор | 1979 |
|
SU770781A1 |
| Манипулятор для раздельного съема отливок и литниковой системы | 1980 |
|
SU865515A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Рука манипулятора | 1981 |
|
SU984855A1 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ МАРКИРОВКИ | 2000 |
|
RU2189289C2 |
1
Изобретение относится к машиностроению, в частности к автоматическим манипуляторам, и может быть использовано для автоматизации вспомогательных операций при обслуживании технологического оборудования.
Известна рука манипулятора, содержащая силовой цилиндр, корпус, в котором установлен с возможностью перемещения корпус силового цилиндра, на котором закреплен выдвижной упор, взаимодействующий с демпферами, устанбвленными на корпусе руки 1.
Однако известная рука манипулятора характеризуется недостаточной точностью позиционирования изделия.
Целью изобретения является повышение точности позиционирования.
Указанная цель достигается тем, что рука манипулятора снабжена роликами, установленными на эксцентриковых осях, и расположенными на внутренней поверхности корпуса направляющими, причем оси роликов установлены с возможностью поворота вокруг своей оси, а выдвижной упор смонтирован на корпусе силового цилиндра щарнирно с возможностью взаимодействия
с демпфером через выполненное в корпусе руки окно.
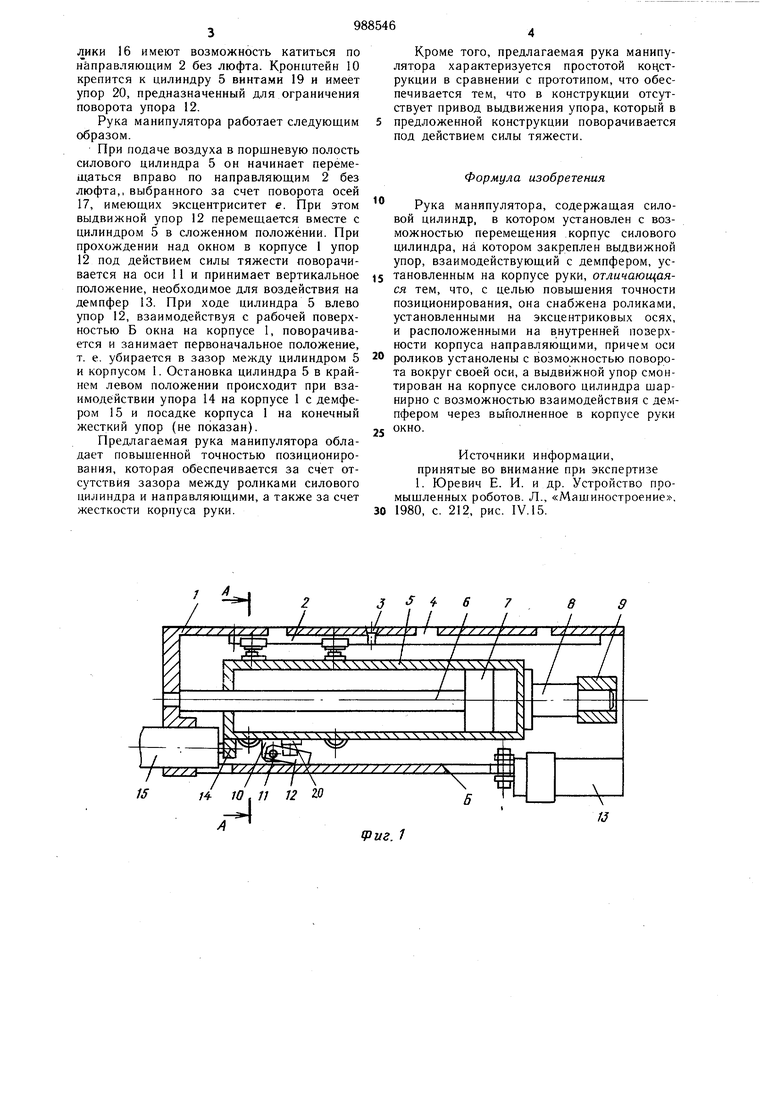
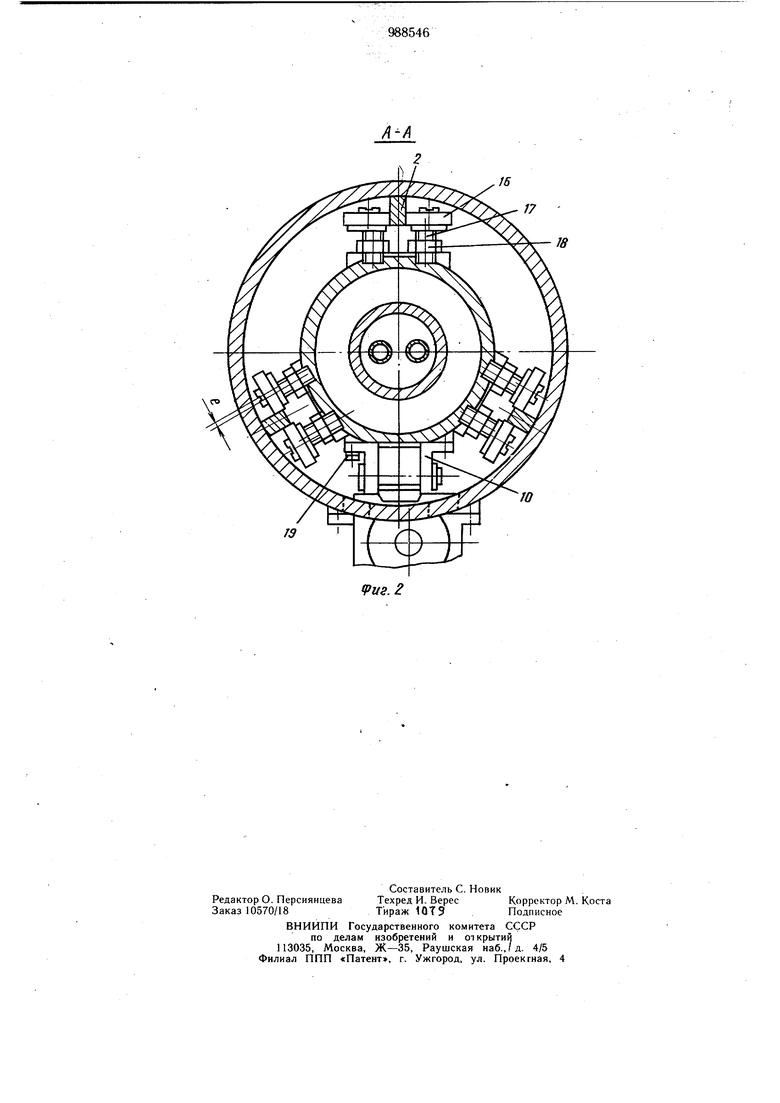
На фиг. 1 показана рука манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
5 Рука манипулятора содержит неразрезной для обеспечения жесткости корпус 1 с окном. В корпусе 1 установлен с возможностью перемещения по съемным направляющим 2, закрепленным винтами 3 и имею Q щим шипы 4 для фиксации, силовой пневмоцилиндр 5 со штоком 6 и поршнем 7. Шток 6 жестко закреплен в корпусе 1. На торце силового цилиндра 5 закреплен кронштейн 8, несущий хомут 9 для установки на нем схвата для захвата детали (не показан).
15 На цилиндре 5 имеется кронштейн 10 с осью 11, на которой насажен выдвижной упор 12, имеющий возможность поворота вокруг оси 11 для взаимодействия с демпферами 13 в крайнем правом положении цилиндра 5, и жесткий упор 14 для взаимодействия с демпфером 15 в крайнем левом положении цилиндра 5 для его остановки. Цилиндр 5, кроме того, снабжен роликами
16,насаженными на эксцентриковые оси
17,которые законтрены гайками 18. Ролики 16 имеют возможность катиться по направляющим 2 без люфта. Кронштейн 10 крепится к цилиндру 5 винтами 19 и имеет упор 20, предназначенный для ограничения поворота упора 12.
Рука манипулятора работает следующим образом.
При подаче воздуха в порщневую полость силового цилиндра 5 он начинает перемещаться вправо по направляющим 2 без люфта,, выбранного за счет поворота осей 17, имеющих эксцентриситет е. При этом выдвижной упор 12 перемещается вместе с цилиндром 5 в сложенном положении. При прохождении над окном в корпусе 1 упор 12 под действием силы тяжести поворачивается на оси 11 и принимает вертикальное положение, необходимое для воздействия на демпфер 13. При ходе цилиндра 5 влево упор 12, взаимодействуя с рабочей поверхностью Б окна на корпусе 1, поворачивается и занимает первоначальное положение, т. е. убирается в зазор между цилиндром 5 и корпусом 1. Остановка цилиндра 5 в крайнем левом положении происходит при взаимодействии упора 14 на корпусе 1 с демфером 15 и посадке корпуса 1 на конечный жесткий упор (не показан).
Предлагаемая рука манипулятора обладает повыцгенной точностью позиционирования, которая обеспечивается за счет отсутствия зазора между роликами силового цилиндра и направляющими, а также за счет жесткости корпуса руки.
Кроме того, предлагаемая рука манипулятора характеризуется простотой конструкции в сравнении с прототипом, что обеспечивается тем, что в конструкции отсутствует привод выдвижения упора, который в предложенной конструкции поворачивается под действием силы тяжести.
Формула изобретения
Рука манипулятора, содержащая силовой цилиндр, в котором установлен с возможностью перемещения корпус силового цилиндра, на котором закреплен выдвижной упор, взаимодействующий с демпфером, установленным на корпусе руки, отличающаяся тем, что, с целью повыщения точности позиционирования, она снабжена роликами, установленными на эксцентриковых осях, и расположенными на внутренней поверхности корпуса направляющими, причем оси роликов устанолены с возможностью поворота вокруг своей оси, а выдвижной упор смонтирован на корпусе силового цилиндра шарнирно с возможностью взаимодействия с демпфером через выполненное в корпусе руки
окно.
Источники информации, принятые во внимание при экспертизе 1. Юревич Е. И. и др. Устройство промыщленных роботов. Л., «Мащиностроение, 1980, с. 212, рис. IV. 15.
15
/7
18
/О
VVS.Z
