(Л
7/
4
О
о
73
фиг.1
Изобретение относится к машиностроению и может быть использовано, например, в промышленных роботах и манипуляторах.
Цель изобретения - расширение техно- логических возможностей за счет обеспечения захвата деталей как за внутреннюю, так и за наружную поверхность с регулируемым усилием зажима.
На фиг. 1 изображен схват, общий вид; на фиг. 2 - вид А на фиг. 1.
Схват состоит из корпуса 1, в направляющих пазах 2 которого закреплены шарниры, являющиеся опорами 3 зажимных рычагов 4 с губками 5, связанных с приводом 6 через коромысло 7 с направляю- щими пазами 8, тяги 9 с шарнирными опорами 10 и оси 11 обода 12, охватывающего выступающие части корпуса 1. Опоры 3 и 10 установлены с возможностью перемещения и фиксации в направляющих пазах 2 и 8. Направляющие пазы 2 выполнены в од- ной плоскости перпендикулярно продольной оси привода и расположены попарно.
Исходных положений для губок 5 захватных рычагов 4 может быть два, в зависимости от того, за какую поверхность захватывается деталь 13. При захвате последней за наружную поверхность губки 5 захватных рычагов 4 разведены. При захвате детали 13 за внутреннюю поверхность губки 5 сведены. Эти положения достигаются путем перемещения и фиксации шарнирных опор 10 тяг 9 относительно точек поворота зажимных рычагов 4, расположенных в направляющих пазах 2 корпуса 2. Шток
ди
привода 6 находится во втянутом положении. При работе схвата шток привода 6 выдвигается, перемещая коромысло 7 с направляющими пазами 8 и закрепленные в них посредством шарнирных опор 10 тяги 9, которые через оси 11 в зажимных рычагах 4 поворачивают вокруг зафиксированных в нат правляющих пазах 2 корпуса 1 щарнирных опор 3 зажимные рычаги 4, губки 5 которых разводятся либо сводятся до упора в зажимаемую деталь 13. Освобождение детали происходит в обратной последовательности при перемещении штока, привода в исходное положение.
Формула изобретения
1.Схват, содержащий корпус, с выступающими частями, на которых щарнирно установлены рычаги и привод с коромыслом, шарнирно связанным через тяги с рычагами, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения захвата деталей как за внутреннюю, так и за наружную поверхность с регулируемым усилием зажима, корпус и коромысло выполнены с направляющими пазами, расположенными попарно в одной плоскости и перпендикулярно к продольной оси привода, а шарниры рычагов и тяг закреплены соответственно в этих пазах с возможностью перемещения.
2.Схват по п. 1, отличающийся тем, что, с целью повыщения жесткости конструкции, корпус снабжен ободом, охватывающим его выступающие части и жестко связанным с ними.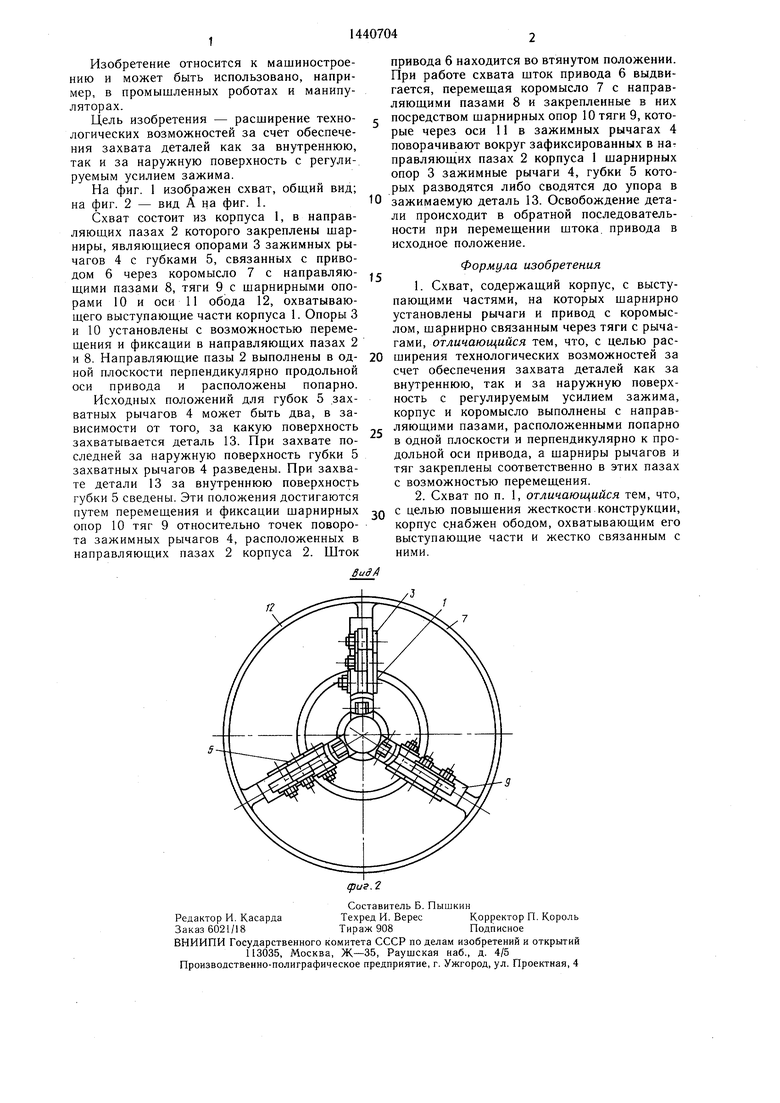
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1983 |
|
SU1117205A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват | 1982 |
|
SU1093543A1 |
| Схват | 1984 |
|
SU1178585A1 |
| Захват | 1978 |
|
SU768635A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват | 1986 |
|
SU1335450A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата деталей как за внутреннюю, так и за наружную поверхность с регулируемым усилием зажима. Для этого корпус 1 и коромысло 7 выполнены с направляющими пазами 2 и 8 соответственно, расположенными попарно, лежаш,ими в одной плоскости перпендикулярно продольной оси привода 6. При захвате детали 13 за наружную поверхность губки 5 захватных рычагов 4 разведены, при захвате детали за внутреннюю поверхность губки сведены. Эти положения достигаются путем перемеш,ения и фиксации шарнирных опор 10 и тяг 9 относительно точек поворота зажимных рычагов 4, расположенных в направляющих пазах 2 корпуса 1. 1 з.п.ф-лы, 2 ил.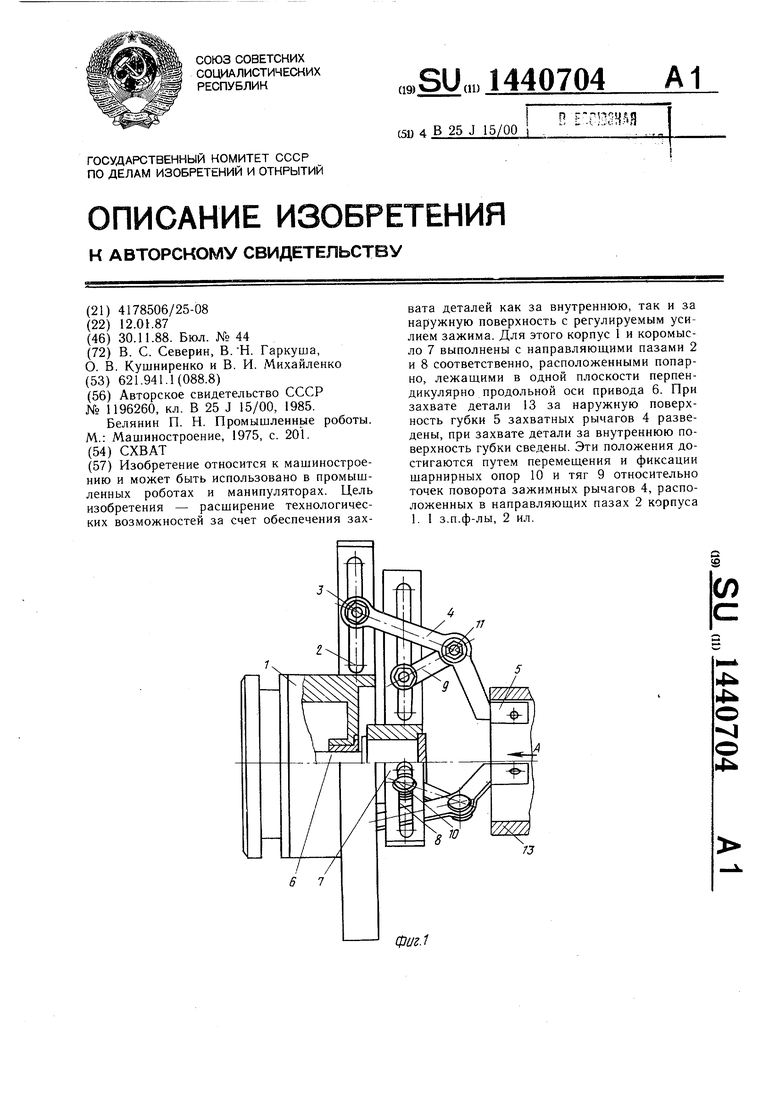
| Схват | 1984 |
|
SU1196260A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Белянин П | |||
| Н | |||
| Промышленные роботы | |||
| М.: Машиностроение, 1975, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
