(5М ГАЗОСТАТИЧЕСКАЯ OfiOPA
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| Прецизионный газостатический шпиндельный узел | 2021 |
|
RU2771708C1 |
| ГАЗОСТАТИЧЕСКИЙ РАДИАЛЬНО-УПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 1966 |
|
SU184565A1 |
| Бесконтактный радиально-упорный подшипник скольжения с внешним источником давления смазки | 1985 |
|
SU1280224A1 |
| Устройство для испытания двух одинаковых противонаправленных уплотнений | 1976 |
|
SU596770A1 |
| Узел валков прокатной клети | 1975 |
|
SU806182A1 |
| Электрическая машина | 1984 |
|
SU1246250A1 |
| Радиально-упорная гидростатическая опора | 1989 |
|
SU1668763A1 |
| Газостатический подшипник | 1990 |
|
SU1726858A2 |
| Гидростатическая опора | 1975 |
|
SU648759A1 |
1 Изобретение относится к машиностроению, в частности к преццзионным аэростатическим уравновешенным роторным узлам.
Известен гидростатический подшипник, содержащий охватывающую вал втулку с несущими карманами и каналами подвода рабочей жидкости под давлением, регулирующий выходной дроссель, датчик смещения вала и блок JQ управления выходным дросселем, причем изменение сопротивления на выходе жидкости из опоры производится за счет регулирования давления жидкости, подаваемой в выходной дроссель в со- ,5 ответствии с величиной смещения вала от центра вращения tHНедостатком описанного подшипника является необходимость подачи до- 20 полнительного расхода жидкости под давлением в выходной дроссель.
Цель изобретения - повышение жесткости опоры и ее регулирование без
изменения давления и расхода подводиме(го газа.
Указанная цель достигается тем, что в газостатической опоре, содержащей охватывающую вал втулку с несущими карманами и каналами подвода газа под давлением, регулирующий выходной дроссель, датчик смещения вала и блок управления регулирующим , дросселем, регулирующий выходной дрос сель выполнен в виде пьезокерамического кольца.
Кроме того, опора может быть снабжена упорным элементом, воспринимающим осевые смещения вала, а регулирующий выходной дроссель установлен... на торце втулки со стороны этого элемента.
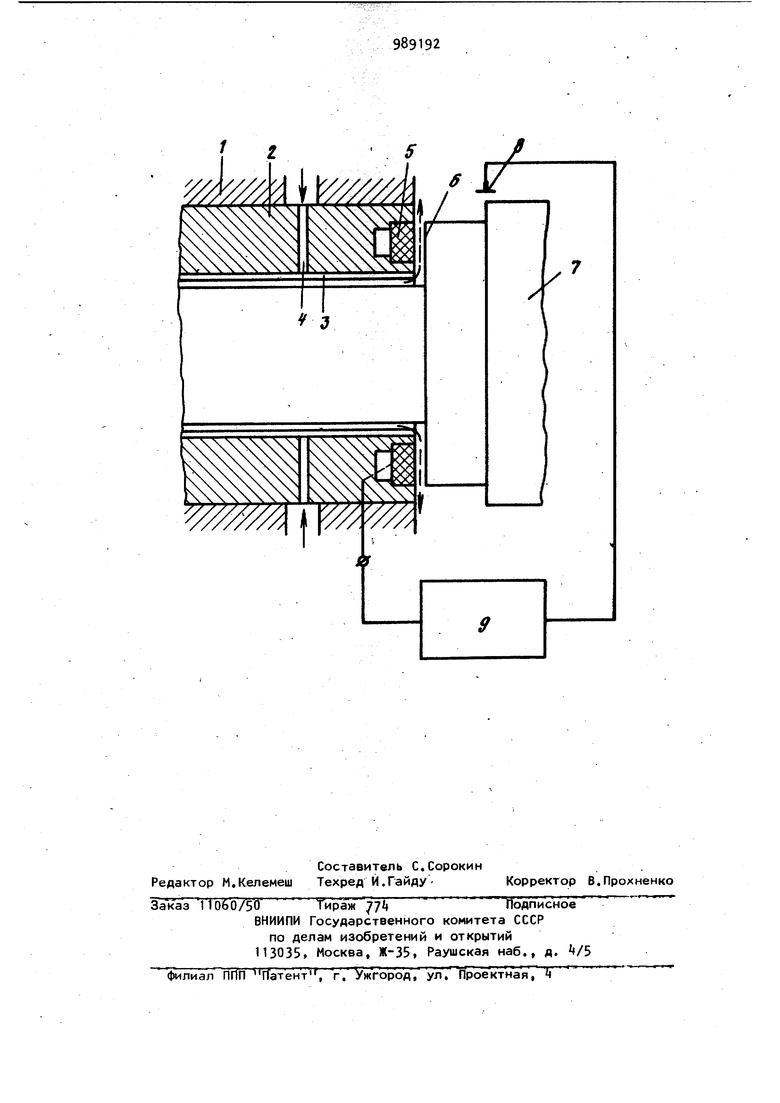
На чертеже схематически изображена предлагаемая газостатическая опора.
Газостатическая опора содержит закрепленную в корпусе 1 втулку 2 с несущими карманами 3 и каналами подво9да газа , регулирующий выходной дро сель 5, выполненный в виде пьезокврамического кольца установленного в торцовой части втулки 2 перед упор ным элементом 6 вала 7| а также датчик 8 осевых .перемещений и блок 9 управления,. Опора работает следующим образом. Подаваемый через каналы k сжатый газ попадает в зазор между втулкой 2 и валом 7г уравновешивает пoQлeдний и через торцовые зазоры, придавая опоре осевую жесткость, выходит в ок ружающее пространство, В случае возникновения от осевых нагрузок соотве ствующих осевых перемещений вала 7 изменяется ширина зазора между торца ми втулки 2 и упорного элемента 6, а значит, и давление газа, протекающего в этом зазоре. Датчиком 8 воспринимается величина этого перемещения, и по его сигналу блоком 9 управ ления формируется определенный высокочастотный сигнал управления регу лирующим выходным дросселем 5, Электрический управляющий сигнал обеспечивает соответствующее действие дросселя 5, т,е, это пьезокерамическое кольцо с частотой управляющего сигнала совершает высокочастотные механические колебания, напра вленные в стсг)ону упорного элемента 6 вала 7 Поскольку в прецизионных малогабаритных газостатических опорах зазор между торцовыми поверхностями втулки 2 и упорного элемента 6 составляет несколько десятков микронов, то такое расстояние позволяет от действия дросселя 5 обеспечить сдавливающую воздушную подушку в этом зазоре, Поэтому согласно величине сиг Яала датчика 8 осевых перемещений в зазоре между втулкой 2 и упорными элементами 6 вала 7 в направлении, параллельном направлению оси,действу ет воздушная подушка, которая заграж дает путь выходящему уравновешивающему газу, ПОЭТОМУ осевая, а также и радиальная жесткость опоры увеличи вается, причем увеличение жесткости пропорционально величине осевой на грузки, При этом осевая жесткость опоры увеличивается больше, чем радиальная, так как действие сдавливаемой воздушной подушки в упомянутом зазоре распространяется в осевом направлении и действует в упор (, или уменьшается ) осевому перемещению вала 7. Выполнение газостатической опоры предложенной конструкции позволяет регулировать жесткость подвески вала согласно действующим возмущениям и обеспечить при этом желаемую стабильность вращения. Регулирование жест- I кости опоры при этом осуществляется без изменения параметров газового накопления, эффектно используя для этого сравнительно моудные и употребляющие незначительную энергию пьезокерамические вибраторы. При этом конструктивное выполнение газостатической опоры простое и технологически легко осуществимое, а подрегулирование позволяет применение опорь в особых, например,бортовых системах. Формула изобретения 1,Газостатическая опора, содержащая охватывающую вал втулку с несущими карманами и каналами подвода газа под давлением, регулирующий выходной дроссель, датчик смещения вала и блок управления выходным дросселем, отличающаяся тем, что, с целью повышения жесткости и ее регулирования без изменения давления и расхода подводимого газа, регулирующий выходной дроссель выполнен в виде пьезокерамического кольца 2.Опора по п. 1, отличающаяся тем, что, она снабжена упорным элементом, воспринимающим осевые смещения вала, а регулирующий выходной дроссель установлен на торце втулки со стороны этого элемента. Источники информации, принятые во внимание при экспертизе 1, Патент Японии № 46-19322, кл, F 16 С 17/00, 1971 (прототип).
