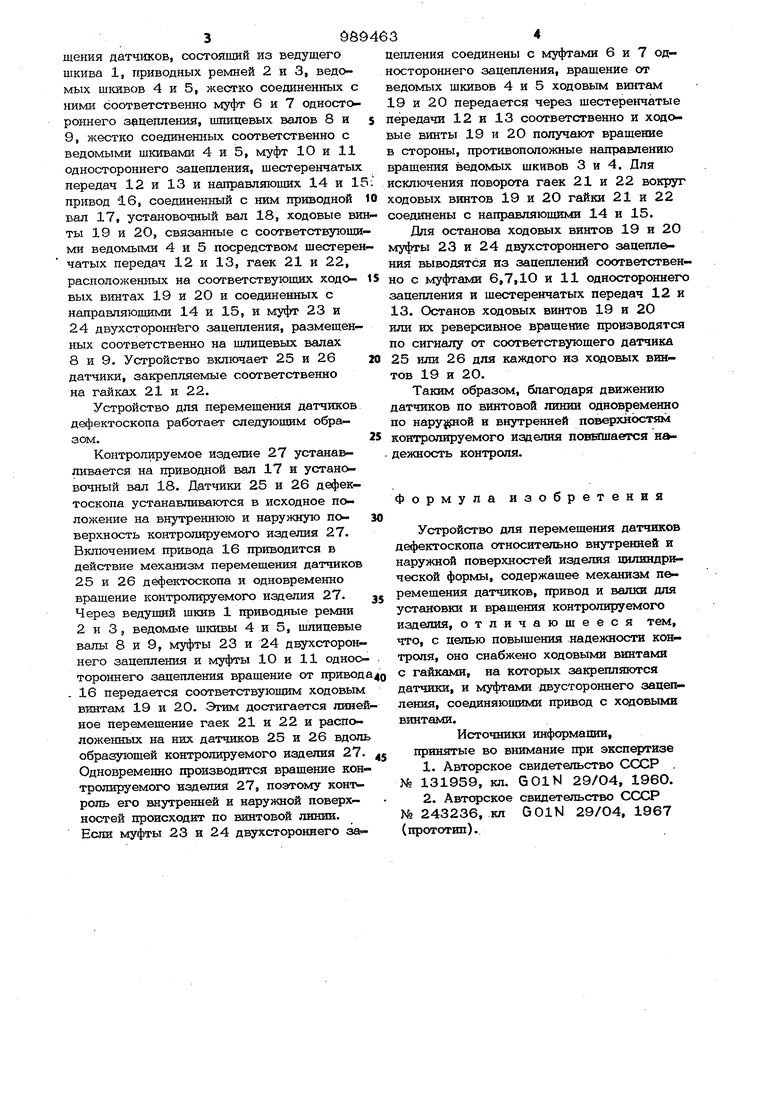
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ДАТЧИКОВ ДЕФЕКТОСКОПА Изобретение относится к измерительной технике и может быть использовано щйх нера: ушаюшем контроле изаелий из линдрической формы. Известно устройство для дефектоско. ПИИ изделий цилиндрической формы, содер- жашее установленный с возможностью возвратно-поступательного движения вдоль к жтролиру«лого изделия сосуд, заполненный жидкостью с заключенными внутри его излучателем (преобразователем), а дня п емешения сосуда вокруг изпепия устройство снабжено бесконечными цепями, кинематически связанными с сосудом 1 . С%|нако данное , не обеспечивает контроль 1шутренних поверхностей, необходимость перенастройки (изменения длины цепей) при измельчении диаметра контролируемою изделия. Наиболее близким по технической, суп ности к изобретению является устройство для перемешеншЕ датчиков дефектоскопа относительно внутренней и наружной по верхностей изделия шшиндрЕСческой формы, содержашее механизм перемеи ения датчиков, привод и валки для установки и врар шения коятролируемохю изделия) 2J . Однако известное устхюйство характеризуется недостаточной надежностью ко/а- троля, обусловленной нево(я ожностью котатроля одновременно с внутренне н наруя ней его сторон, а также грсвдоздкостью устройства по )авнш1ию с ковтролируемьЕМ издели « 1. Л-. Цепь изобретения - повышение , надевпносги контроля. Эта цель достигается тем, что устройство дпя пер ъ ещения датчиков деф стоско па снабжено ходовыми searatim с гайками, на которых закр@пляют я датчики, и муфта ми двустороннего зацепления, соединяхнпимя привод с ходовыми винтами. На фнг. 1 изображена кинематическая схема, устр ства; на фиг. 2 - вид А на фиг. 1. Устрс ство для перемещения датчиков дефектоскопа содержит механизм
шения датчиков, состоящий из ведущего шкива 1, приводных ремней 2 и 3, ведомых Ш1швс)в 4 и 5, жестко соединенных с ними соответственно муфт 6 и 7 одностороннего зрцепления, шпицевых валов 8 и $ 9, жестко соединенньтх соответственно с ведомыми шкивами 4 и 5, муфт 10 и 11 одностороннего заценления, шестеренчатых передач 12 и 13 и направляющих 14 и 15: привод 16, соединенный с ним приводной 10 вал 17, установочный вал 18, ходовые ви ты 19 и 20, связанные с соответствующи ми ведомыми 4 и 5 посредством шестерен чатых передач 12 и 13, гаек 21 и 22, расположенных на соответствующих ходовых В1штах 19 и 20 и соединенных с направляющими 14 и 15, и муфт 23 и 24двухстороннего зацепления, размещенных соответственно на шлицевых валах 8 и 9, Устройство включает 25 и 26 датчи1си, закрепляемые соответственно на гайках 21 и 22. Устройство для перемещения датчиков дефектоскопа работает следующим образом. Контролируемое изделие 27 устанавливается на приводной вал 17 и установочный вал 18. Датчики 25 и 26 дефектоскопа устанавливаются в исходное положение на внутреннюю и наружную поверхность контролируемого изделия 27. Включе гаем привода 16 приводится в действие механизм перемещения датчиков 25и 26 дефектоскопа и одновременно вращение коктролируемогхэ изделия 27. Через ведущий щкив 1 приводные ремни 2 и 3, ведомые щкивы 4 и 5, шлицевые валы 8 и 9, муфты 23 и 24 двухстороннего зацепления и муфты 10 и 11 одноотороннего зацепления вращение от привод . 16 передается соответствующим ходовым винтам 19 и 20. Этим достигается линей ное перемещение гаек 21 и 22 и расположе1шых на них датчиков 25 и 26 вдоль образующей контролируемого изделия 27. Одновременно производится вращение кон- тролируемохч) изделия 27, поэтому контроль его внутренней и наружной поверхностей происходит по винтовой линии. Если муфты 23 и 24 двухстороннего за
цепления соединены с муфтами 6 и 7 одностороннего зацепления, вращение от ведомых шкивов 4 и 5 ходовым винтам 19 и 20 передается через шестеренчатые передачи 12 и 13 соответственно и ходовые винты 19 и 2О получают вращение в стороны, противоположные направлению вращения ведомых шкивов 3 и 4, Для исключения поворота гаек 21 и 22 вокруг ходовых винтов 19 и 20 гайки 21 и 22 оединены с направляющими 14 и 15. Для останова ходовых винтов 19 и 20 уфты 23 и 24 двухстороннего зацепл&ия выводятся из зацеплений соответствено с муфтами 6,7,10 и 11 одностороннего ацепления и щестеренчатых передач 12 и 13. Останов ходовых винтов 19 и 20 ли юс реверсивное вращение производятся о сигналу от соответствующего датчика 25 или 26 для каждого из ходовых винов 19 и 20. Таким образом, благодаря движению атчиков по винтовой линии одновременно о и внутренней noBepxHocTsiM контролируемого изделия повшиается надежность контроля. Формула изобретения Устройство для перемещения датчиков дефектоскопа относительно внутренней и наружной поверхностей изделия цилиндрической формы, содержащее механизм перемещения датчиков, привод и валки для установки и вращения контролируемого изделия, отличающееся тем, что, с целью повышения надежности контроля, оно снабжено ходовыми винтами с гайками, на которых закрепляются датчики, и муфтами двустороннего зацепления, соединяющими привод с ходовыми винтами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР , № 131959, кл. G01M 29/04, 1960. 2.Авторское свидетельство СССР № 243236, кл G01NJ 29/04,1967 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной кантователь опок | 1981 |
|
SU1090496A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Устройство для контроля изделий | 1991 |
|
SU1826060A1 |
| Самоходная тележка | 1978 |
|
SU749726A1 |
| Сканирующее устройство к дефектоскопу цилиндрических изделий | 1983 |
|
SU1095070A1 |
| Кантователь металлоконструкций под сварку | 1988 |
|
SU1532260A1 |
| Устройство для перемещения датчика дефектоскопа | 1981 |
|
SU974255A1 |
| Электроэрозионный станок | 1980 |
|
SU948598A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Сканирующее устройство для ультразвукового контроля | 1980 |
|
SU938143A1 |

f
иг.г
