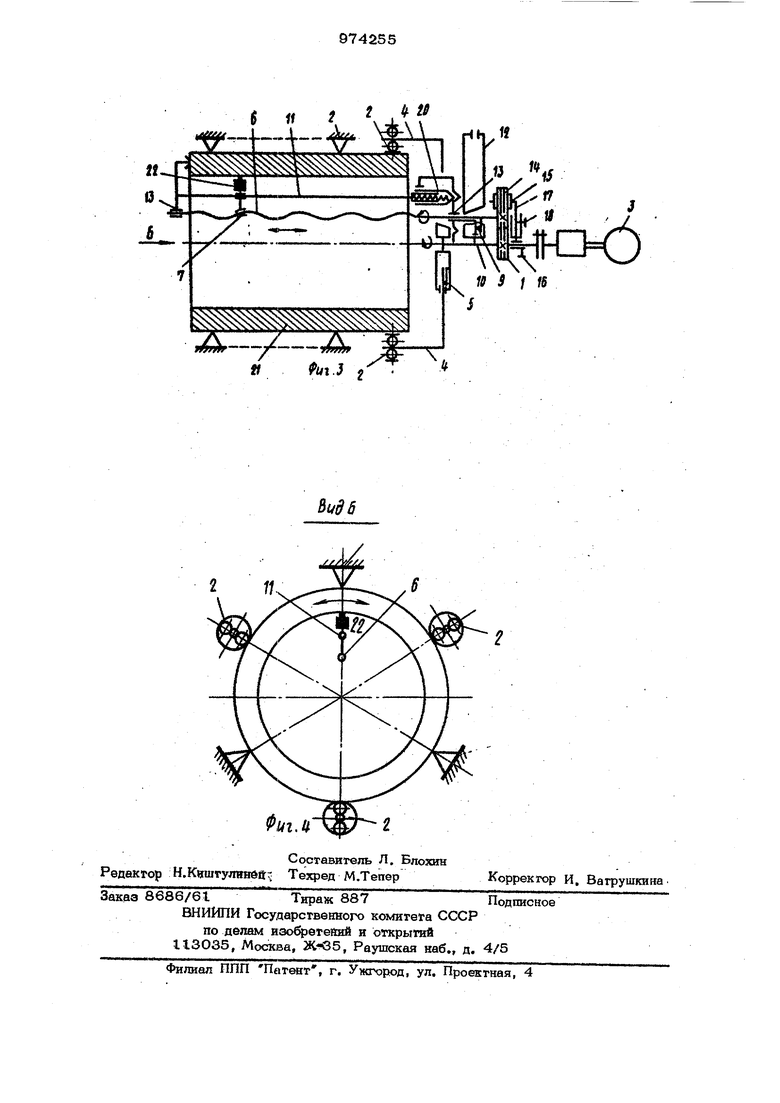
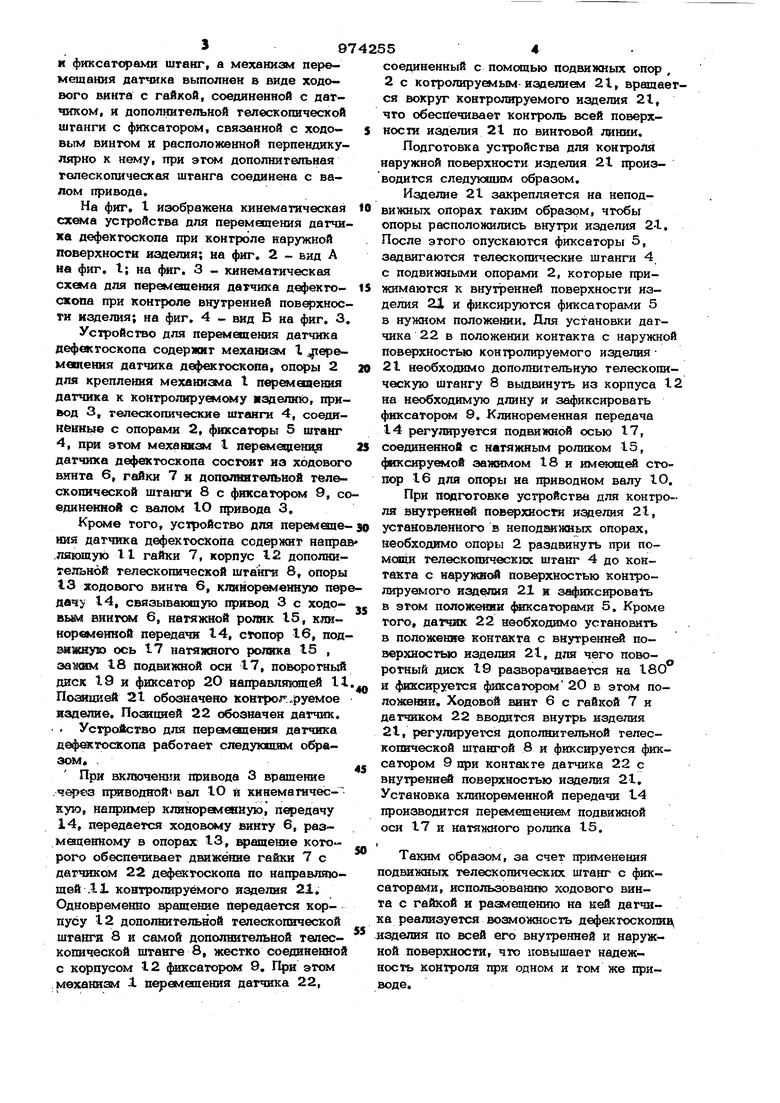
и фиксатс ами штанг, а механизм перемешания датчика выполнен в виде ходового винта с гайкой, соединенной с дат чиком, и пополнительной телескопической шганги с фиксатором, связанной с ходовым винтом и расположенной перпендикулярно к нему, при этсм дополнительная телескопическая штанга соединена с валом привода. На фиг, t изображена кинематическая скемй устройства для перемещения датчика дефектоскопа при контроле наружной поверхности изделия; на фиг. 2 - вид А на фиг, I; на фиг. 3 - кинематическая схема для перемещения датчика дефектоскопа при контроле внутренней поверхности изделия; на фиг. 4 - вид Б на фиг, 3 Устройство для перемещения датчика дефектоскопа содержит механизм I ереметения датчика дефектоскопа, опоры 2 для крепления механизма t перемешения датчика к контролируемому изделию, привод 3, телескопические штанги 4, соеяиненные с опорами 2, фиксаторы 5 штанг 4, при этом механизм 1 перемещенця датчика дефектоскопа состоит из ходового винта 6, гайки 7 и допол«ител19Ной телескопической штанги 8 с фиксатором 9, со единенной с валом Ю привода 3, Кроме того, устройство для перелетеиия датчика дефектоскопа содержит непра .ляющую II гайки 7, корпус 12 дополнителы(1бй телескопической штанги 8, опоры 13 ходового винта 6, клинор еиную пер аочу 14, связывакяяую привод 3 с ходовьш1 внитом 6, натяжной ролик 15, клинороменной передачи 14, ctonop 16, под Вйшгую ось 17 натяжного ролика t5 , зажим 18 подвижной оси t7, поворотный диск 19 и фиксатор 20 направияклцей И Позицией 21 обозначено контрог..руемое изделие. Позицией 22 обозначен датчик. . . Устройство для перемещения датчика дефектоскопе работает следующим образом. . При включении привода 3 вращение .через щжводной вал Ю и кинематическую, например клиноремевную, передачу 14, передается ходовому вийту 6, размегценному в опорах 13, вращение которого обеспечивает движение гайки 7 с датчиком 22 дефектоскопа по направлепощей .11 контролируемого изделия 21, Одновременно вращение передается корпусу 12 дополнительной телескопической штанги 8 и самой дополшгтельной телескопической штанге 8, жестко соединенной с корпусом 12 фиксаторсш 9, При этом механигм Д. перемещения датчика 22, соединенный с пометцью подвижных опор , 2 с котролируемым-изделием 21, вращается вокруг контролируемого изделия 21, что обеспечивает контроль всей поверхности изделия 21 по винтовой линии. Подготовка устройства для контроля наружной поверхности изделия 21 производится следуюишм образом. Изделие 21 закрепляется на неподвижных опорах таким образом, чтобы опоры расположились внутри изделия 2-1. После этого опускаются фиксаторы 5, задвигаются телескопические шганги 4 с подвижными опорами 2, которые прижимаются к внутренней поверхности изделия 21 и фиксируются фиксаторами 5 в нужном положении. Для установки датчика 22 в положении контакта с наружной поверхностью контролируемого идделия 21 необходимо дополнительную телескопическую штангу 8 выды1нуть из корпуса 12 на необходимую длину и зафиксировать фиксаторсал 9. Клиноременная передача 14 регулируется подвижной осью 17, соединенной с натяжным роликом 15, фиксируемой зажимом 18 и имеющей стопор 16 для onqpbi на приводном валу Ю. При псщготовке устройства для контроля внутренней поверхности изделия 21, установленного в неподвкжньсс опорах, необходимо опоры 2 раздвинуть при помощи телескопическ штанг 4 до контакта с наружной поверхностью контролируемого изделия 21 и з иксироваТь в этом положеиви 4етссагорамя 5. Кроме того, датчик 22 необходимо установить в положение контакта с внутренне поверхностыо изделия 21, для чего поворотный диск 19 разворачивается на 18О и фиксируется фиксатором 20 в этом положении. Ходовой винт 6 с гайкой 7 и датчиком 22 вводится внутрь изделия 21, регулируется дополнительной телескопической штангой 8 и фиксируется фиксатором 9 при контакте датчика 22 с внутренней поверхностью изделия 21. Установка клиноременной передачи 14 производится перемешениел подвижной оси 17 и натяжного ролика 15, t Таким образом, за счет применения подвижных телескопических штанг с фиксаторами, использовашпо ходового винта с гайкой и размещению на ней датчика реализуется возможность дефектоскопн изделия по всей его внутренней и наружной поверзшости, что повышает надежность кон1роля при одном и том же приводе.
Формула изобретения
Устройство для перемещения датчика дефектоскопа, содержащее механизм перемешения датчика, опоры для крепления механизма перемещения датчика к контролируемому изделию и привод, отличающееся тем, .что, с целью повышения надежности и расширения технологических возможностей контроля, оно снабжено телескопическими штангами, соединенными с опорами, и фиксаторами штанг, а механизм перемещения датчика вьшолн к в виде ходового винта с $$$$ $$$$у утЯЧ Г л/ Т2 ж
я
гайкой, соединенной с датчиком, и дополнительной телескопической штанги с фиксатором, связанной с ходовым винтом и расположенной перпендикулярно к нему, при этом дополнительная телескопическая штанга соединена с валом привода.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 192466, кл. 301N 27/82, 1965.
2,Авторское свидетельство СССР № 198778, кл. G01 N 29/О4, 1966 (прототип).
Фи.Г
Ы/( tecxi I 11 f, t tS
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвуковой дефектоскопии изделий в труднодоступных местах | 1982 |
|
SU1033959A1 |
| Сканирующее устройство к дефектоскопу цилиндрических изделий | 1983 |
|
SU1095070A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Устройство для контроля трубопроводов | 1984 |
|
SU1317356A1 |
| Устройство для ультразвукового контроля изделий | 1986 |
|
SU1415176A1 |
| Устройство для перемещения датчиков дефектоскопа | 1981 |
|
SU989463A1 |
| Устройство для наружного контроля трубопроводов | 1984 |
|
SU1226292A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |