(54) АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Автооператор для гальванических линий | 1983 |
|
SU1138369A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Автоматическая линия для гальванической обработки изделий | 1986 |
|
SU1381204A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Устройство для загрузки невулканизованных покрышек в форматоры-вулканизаторы | 1985 |
|
SU1321598A1 |
| Автооператор для автоматической линии термообработки | 1976 |
|
SU748113A1 |
Изобретение относится к грузоподъемной и транспортной технике и может быть использовано в качестве автос ператоров гальванических линий. Известен автооператор для гальванических линий, включающий ходовую тележку, каретку с блоком, через который перекинут трос, связанный с приводным барабаном 1. Недостатком данного автооператора является невысокая производительность из-за невозможности обеспечения высокой скорости выше ванн и ее снижения при погружении в ванну. Наиболее близким по технической сущности и достигаемому результату к изобретению является автооператор для гальванических лнний, включающий ходовую тележky с вертикальными направляющими, в которых размещена каретка с блоком, огибаемым тросом, связанным одним концом с приводным барабаном, а другим - с механизмом изменения скорости каретки, на котором установлен подвижный элемент, взаимодействующий с ограничителем хода каретки 2. Недостатком данного устройства является то, что возможность изменения скорости каретки только в два раза не обеспечивает высокой производительности автооператора, так как не позволяет установить оптимальные скорости как на участке погружения в ванну, так и выще ее. Производительность такого автооператора ограничивается лимитирующей скоростью на одном из участков и является высокой лищь для случая, когда отношение оптимальной скорости выше ванны к оптимальной скоростн на участке погружения в ванну равно двум. Невозможность обеспечить перемещение каретки с оптимальными скоростями на различных участках трассы увеличивает время подъема и опускания, а значит, и время переноса подвесок из ванны в ванну. Это ухудшает качество обработки -деталей, либо приводит к браку, так как время для ряда процессов, например при переносе подвесок из ванны пассирования в ванну-сборник с холодной водов, из ванны травления в ванну пррмывки и т. д. должно быть как можно меньшим, Для сокращения указанного времени приходится уменьшать величину вертикального перемещения подвески за счет уменьшения ее высоты, что приводит к уменьшению съема продукции, т. е. к снижению производительности линии.
Цель изобретения - повышение качества обработки деталей и повышение производительности путем обеспечения необходимого соотношения скоростей перемещения подвески с деталями на участках в жидкости ванны и выше ее.
Указанная цель достигается тем, что в автооператоре для гальванических линий, содержащем ходовую тележку с вертикальными направляющими, в которых размещена каретка с блоком, огибаемым тросом, связанным одним концом с приводным барабаном, а другим - с механизмом изменения скорости каретки, на котором установлен подвижный элемент, взаимодействующий с ограничителем хода каретки, механизм изменения скорости каретки выполнен в виде установленной на ходовой тележке с возможностью свободного вращения катушки, с которой связан конец троса, и двух звездочек с огибающей их цепной передачей, на которой смонтирован подвижный элемент, при этом одна звездочка жестко связана с катушкой, а другая установлена посредством оси на вертикальных направляющих, причем ходовая тележка имеет останов, а цепь - кулак, установленный с возможностью взаимодействия с остановом тележки.
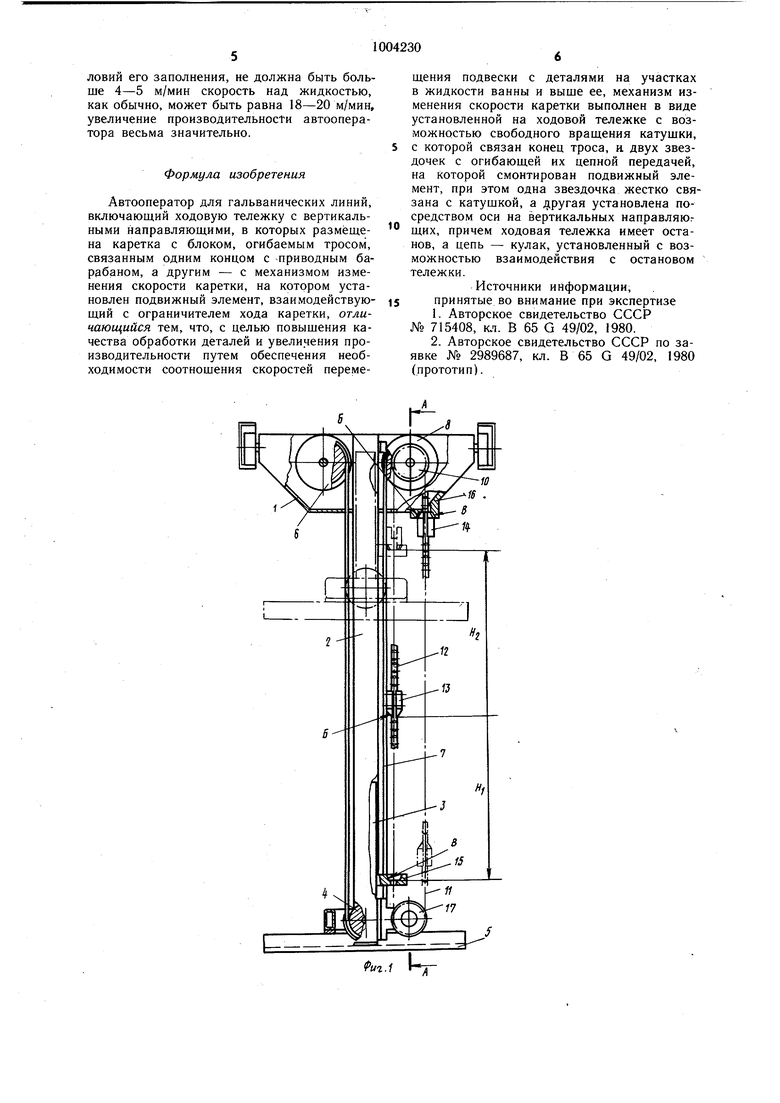
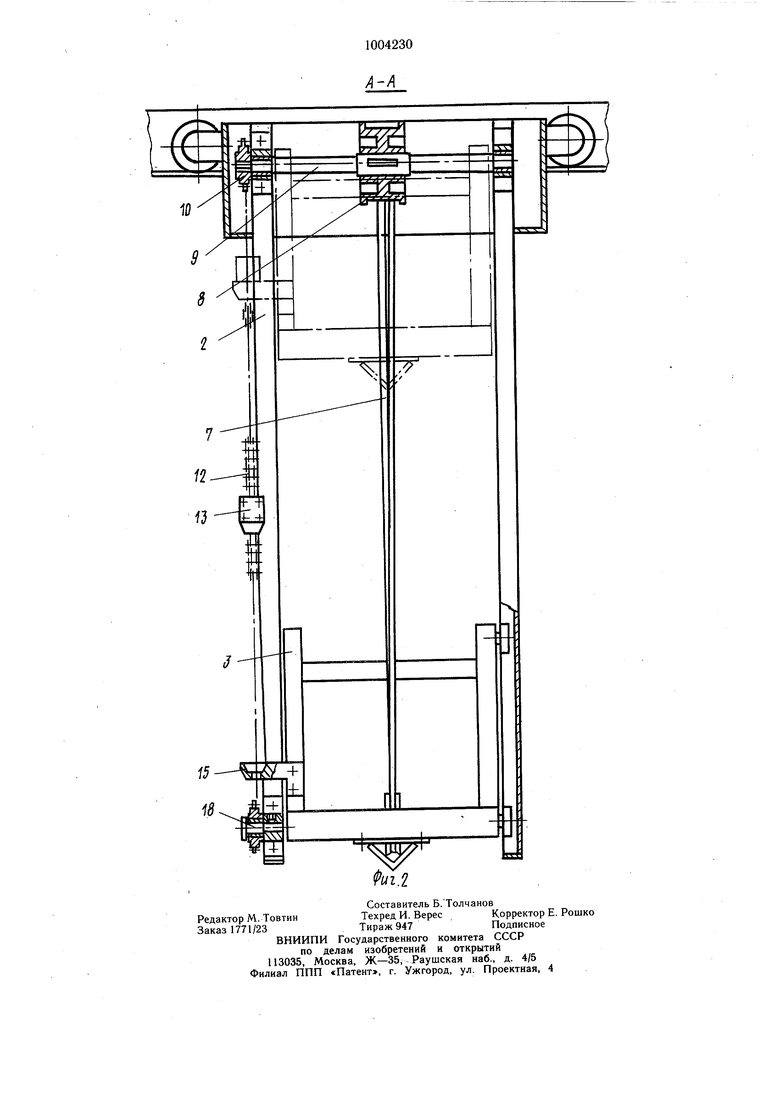
На фиг. 1 изображен автооператор, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1.
Автооператор состоит из ходовой тележки 1 с вертикальными направляющими 2, по которым перемещается каретка 3 с блоком 4, несущая грузозахватный орган 5 для подвесок или барабанов с обрабатываемыми деталями. На тележке 1 смонтирован приводной барабан 6, на котором закреплен один конец троса 7, огибающего блок 4. Свободный конец троса 7 соединен с катушкой 8, установленной с возможностью вращения на тележке 1. Катушка 8 жестко связана посредством вала 9 со звездочкой 10 цепной передачи 11, смонтированной на одной из вертикальных направляющих 2. На одной ветви цепи 12 передачи 11 закреплен подвижный элемент 13, а на другой - кулак 14, взаимодействующие соответственно с ограничителем хода 15, смонтированным на каретке 3, и остановом 16, выполненным на ходовой тележке 1. Подвижный элемент 13 и кулак 14 имеют направляющие поверхности Б, а ограничитель хода 15 и останов 16 - углубления В для взаимной фиксации. Звездочка 17 свободно установлена на оси 18 вертикальных направляющих и служит для натяжения цепи 12. Катущка 8, звездочки 10, 17 и цепная передача 11. представляют собой механизм изменения скорости каретки 3.
На фиг. 1 и 2 основными линиями показано крайнее нижнее положение каретки 3, а штрихпунктирами - ее крайнее верхнее положение.
Работа автооператора осуществляется следующим образом.
Перемещением ходовой тележки 1 автооператор подводится к нужной позиции. Включением приводного барабана 6 на наматывание троса 7 начинается движение каретки 3 вверх, при этом грузозахватный орган 5 захватывает подвеску или барабан с обрабатываемыми деталями. На нижне1у1 участке трассы Н,, когда подвеска или барабан перемещаются в жидкости ванны, каретка 3 движется со скоростью в два раза меньше скорости наматывания троса 7, так как катушка 8 остановлена посредством кулака 14, останова 16 и цепной передачи 11, и свободный конец троса 7 неподвижен.
Такая скорость сохраняется на всем участке трассы Н до тех пор, пока ограничитель хода 15 не дойдет до подвижного элемента 13. Это положение соответствует полному выходу подвески или барабана из жидкости ванны. С этого момента начинается перемещение подвижного элемента 13 и через цепную передачу 11 вращение катушки 8 на наматывание троса 7, что приводит к увеличению скорости перемещения каретки 3. Такая скорость сохраняется на всем участке Hj. Увеличение скорости на участке Н зависит от отношения di/d, где d - диаметр делительной окружности звездочки 10; dj - диаметр катушки 8 по центрам уложенного троса. При df/d.l -скорость на участке Н увеличивается более 2 раз, чем на участке Н,, при dj/ds 1 в 2 раза, при dj/da 1 - менее двух раз. Таким образом, меняя соотношение диаметров звездочки 10 и катушки 8, можно обеспечить любое увеличение скорости каретки на участке Н.
При взаимодействии подвижного элемента 13 с ограничителем хода 15 и кулака 14 с остановом 16 направляющие поверхности Б подвижного элемента 13 и кулака 14 входят соответственно в углубления В ограничителя хода 15 и останова 16, что обеспечивает взаимную фиксацию.
Возможность установления оптимальных скоростей на различных участках при погружении в ванну и выше ее позволяет увеличить производительность автооператора по сравнению с прототипом во всех случаях, кроме того, когда отнощение оптимальной скорости перемещения каретки выше ванны и оптимальной скорости на участке погружения равно двум.
Так например, для линий с барабанами, имеющими индивидуальные приводы, в которых величина перемещения над жидкостью больще, чем в жидкости, а скорость погружения барабана в жидкость, исходя из условий его заполнения, не должна быть больше 4-5 м/мин скорость над жидкостью, как обычно, может быть равна 18-20 м/мин, увеличение производительности автооператора весьма значительно.
Формула изобретения
Автооператор для гальванических линий, включающий ходовую тележку с вертикальными направляющими, в которых размещена каретка с блоком, огибаемым тросом, связанным одним концом с -приводным барабаном, а другим - с механизмом изменения скорости каретки, на котором установлен подвижный элемент, взаимодействующий с ограничителем хода каретки, отличающийся тем, что, с целью повышения качества обработки деталей и увеличения производительности путем обеспечения необходимости соотношения скоростей перемещения подвески с деталями на участках в жидкости ванны и выше ее, механизм изменения скорости каретки выполнен в виде установленной на ходовой тележке с возможностью свободного вращения катушки, с которой связан конец троса, я двух звездочек с огибающей их цепной передачей, на которой смонтирован подвижный элемент, при этом одна звездочка жестко связана с катущкой, а ;д1ругая установлена посредством оси на вертикальных направляюг щих, причем ходовая тележка имеет останов, а цепь - кулак, установленный с возможностью взаимодействия с остановом тележки.
Источники информации, принятые во внимание при экспертизе
