(54) УСТРОЙСТВО ДЛЯ ЦИКЛОВОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Раздвижное транспортное средство для перевозки длинномерных грузов | 1988 |
|
SU1685767A1 |
| Роботизированный комплекс | 1986 |
|
SU1454686A1 |
| Пневмопривод | 1989 |
|
SU1597452A1 |
| Устройство для контроля герметичности полых изделий | 1990 |
|
SU1705710A1 |
| Пневматический привод грузоподъем-НОгО уСТРОйСТВА | 1978 |
|
SU812695A1 |
| Пневматическая система управления цилиндром | 1987 |
|
SU1495532A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневматический привод с периодическим возвратно-поступательным движением | 1980 |
|
SU983327A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
Изобретение относится к области робототехники и может быть использовано при создании цикловых манипуляторов , Известно устройство для циклового управления манипулятором, содержащее входной блок, блок микрокоманд и выходной блок l Наиболее близким по технической сущности к предлагаемому является устройство, содержащее разделительный клапан, первый, второй и третий управляющие пневмораспределители и по., каждой регулируемой координате четвертый управляющий пневмораспределитель, первый и второй ввод и вывод которого соединены соответственно с выводом и вводом пневмоцилиндра, связанного через шток с первым и вторым пневмораспределителем-датчиком, причем выводы первого и второго пневморас.пределителя-датчика подключены соответственно: первой регулируемой координаты к первому и второму вводу первого управляющего пневмораспределителя второй регулируемой координаты к первому вв5)ду второго управляющего пневмораспределителя и третьему и второму вводу соответственно первого и второго управляющего пневмораспределителя. третьей регулируемой координаты и первому и второму вводу третьего управ лякндего пневмораспределителя, а четвертой регулируемой координаты к третьему вводу третьего управляющего пневмораспределителя и четвертым вводам первого и третьего управляющего распределителей, первый ввод разделительного клапана соединен со входом устройства, второй ввод - с первым выводом первого управляющего пневмораспределителя, а вывод - с третьим вводом второго управляющего пневмораспределителя, первым и вторым выводом подключенного ко второму и третьему вводу четвертого управляющего пневмораспределителя первой регулируемой координаты, второй вывод первого управляющего пиевмораспределителя и вывод третьего управляющего пневмораспределителя соединены соответственно со вторым и третьим вводом четвертого управляющего пневмораспределителя второй регулируемой координаты 2 . Недостатком известного устройства является сложность его конструкции, обусловленная избыточным количеством пневмоаппаратов.
Целью изобретения является упроще ние устройства.
Поставленная цель достигается тем что устройство содержит пятый и шестой управляющие пневмораспределители первый и второй выводы которых подключены соответственно ко второму и третьему вводу четвертого управляющего пневмораспределителя третьей и четвертой регулируемых координат,первый, второй и третий ввод пятого управляющего распределителя соединены соответственно с выводом второго пневмораспределителя-датчика четвертой регулируемой координаты, второго пневмораспределителя-датчика второй регулируемой координаты и первого пневмораспределителя-датчика четвертой регулируемой координаты, а первый, второй и третий ввод шестого управляющего пневмораспределителя подключены соответственно к выводам второго пневмораспределителядатчика третьей регулируемой координаты, первого пневмораспределителя-датчика первой регулируемой координаты и первого пневмораспределителя-датчика третьей регулируемой координаты.
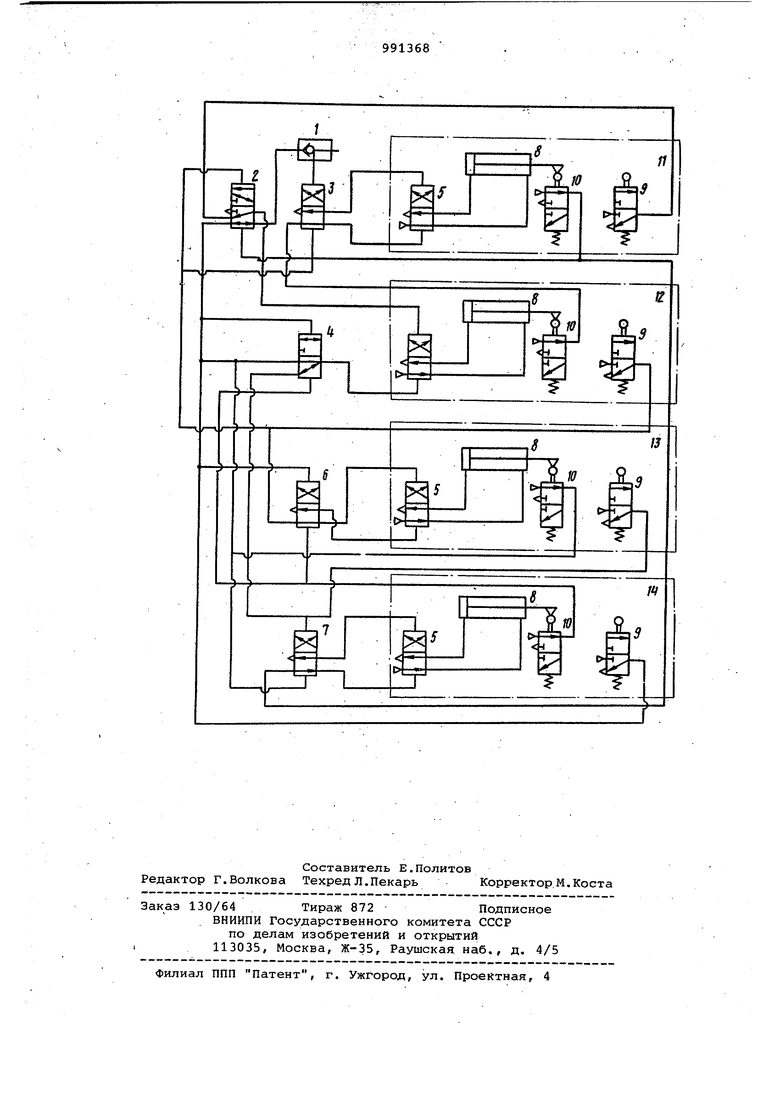
На чертеже изображена функциональная схема предлагаемого устройст ва.Устройство содержит разделитель.ный клапан 1, первый, второй, третий четвертый, пятый и шестой управляющие пневмораспределители 2,3,4,5,6 и 7 соответственно, пневмоцилиндры 8, первые и вторые пневмораспределители- датчики 9 и 10 соответственно, первая, вторая, третья и четвертая регулируемая координата 11,12,13 и 14, соответственно.
Устройство работает следующим образом.
Пусковой сигнал поступает через клапан 1 на пневмораспределитель 3. Пневмораспределитель 3 переключается и соединяет пневмораспределитель 5 первой координаты 11 с выводом пневмораспределителя-датчика 10 второй координаты 12.
Пневмораспределитель первой координаты 11 переключается, сообщая бес штоковую полость пневмоцилиндра 8 первой координаты с источником питания сжатым воздухом, а штоковую полость - с атмосферой.
Шток пневмоцилиндра 8 пер-вой коор динаты 11 выдвигается, освобождая пневмораспределитель-датчик 10 первой координаты 11 и переключая в-кон це хода пневмораспределитель-датчик 9 первой координаты 11. Теперь камера управления пневмораспределителя 5 второй координаты 12 сообщается с истоником питания сжатым воздухом.
Пневмораспределитель 5 второй координаты 12 переключается, сообщая
бесштоковую полость пневмоцилиндра 8 второй координаты 12 с источником питания сжатым воздухом, а штоковую полость - с атмосферой.
ШТок пневмоцилиндЕ)а 8 второй координаты 12 выдвигается, освобождая пневмораспределитель-датчик 10 второй координаты 12 и переключая в . конце хода пневмораспределитель-датчик 9 второй координаты 12. Теперь камера управления пнешмораспределителя 2, камера управления пневмораспределителя 3 и камера управления пневмораспределителя 5 третьей координаты 13 сообщаются с источником, питания сжатым воздухом.
Пневмораспределители 2, 3 и 5 третьей координаты 13 переключаются Пневмораспределитель 5 третьей координаты 13, переключившись, сообщает бесштоковую полость пневмоцилиндра 8 третьей координаты 13 с источником питания сжатым воздухом, а штоковую полость - с атмосферой.
Шток пневмоцилиндра 8 третьей координаты 13 выдвигается, освобождая пневмораспределитель-датчик 10 третьей координаты 13. Теперь камера управления пневмораспрбщелителя 5 второй координаты 12 и камера управления пневмораспределителя 7 сообщаются с источником питания сжатым воздухом.
Пневмораспределитбль 7 и 5 второй координаты 12 переключаются. Пневмораспределитель 5 второй координаты 12, переключившись, сообщает штоковую полость пневмоцилиндра 8 второй координаты 12 с источником питания, сжатым воздухом, а бесштоковую с атмосферой.
Шток пневмоцилиндра В второй координаты 12, втягивается, освобождая пневмораспределитель-датчик 9 второй координаты 12 и переключая в исходном положении пневмораспределительдатчик 10 второй координаты 12. Теперь камера управления пневмораспределителя 5 первой координаты 11 сообщается с источником питания, сжатым воздухом.
Пневмораспределитель 5 первой координаты 11 перекл очается, сообщая штоковую полость пневмоцилиндра 8 первой координаты 11 с источником питания с йатым воздухом, а бесштоковую полость - с атмосферой.
Шток пневмоцилиндра 8 первой координаты 11 втягивается, освобождая пневмораспределитель-датчик 9 первой координаты 11 и переключая в исходном положении пневмораспределительдатчик 10 первой координаты 11. Теперь камера управления пневмораспределителя 5 четвертой координаты 14 и камера управления пневмораспределителя 2 сообщаются с источником питания сжатым воздухом.
ПневмораспределитЬли 2 и 5 четвертой координаты 14 переключаются.. Пневмораспределитель 5 четвертой координаты 14 переключившись, сообщает бесштоковую полость пневмоцилиндра 8 четвертой координаты 14 с источником питания сжатым воздухом, а штоковую .полость - с атмосферой.
Шток пневмоцилиндра 8 четвертой к.оординаты 14 выдвигается освобождая пневмораспределитель-датчик 10 чет-, втертой координаты 14 и переключая в конце хода пневмораспределительдатчик 9 четвертой координаты 14,Теперь камера управления пневмораспределителя 3, камера управления пневмораспределителя 4 и камера управления пневмораспределителя б сообщаются с источником питания сжатым воздухом.
Пневмораспределители 3, 4 и 6 переключаются. Пневмораспределитель 3, переключившись, сообщает первую камеру управления пнеймораспределителя 5 первой координаты 11 с источ НИКОМ питания сжатым воздухом, а вторую камеру управления - с атмосферой.
Пневмораспределитель первой координаты 11 переключается, сообщая бесштокоВую полость пневмоцилиндра 8 первой координаты -11 с источником питания сжатым воздухом, а штоковую полость - с атмосферой.
Шток пневмоцилиндра 5 первой координаты 11 выдвигается, освобождая пневмораспределитель-датчик 10 первой координаты 11 и переключая в конце хода пневмораспределитель-датчик 9 первой координаты 11.- Теперь камера управления .пневмораспределителя 5 второй координаты 12 сообщается с источником питания сжатым воздухом.
Пневмораспределитель 5 второй координаты 12 переключается, сообщая бесштоковую полость пневмоцилиндра 8 второй координаты 12 с источником питания сжатым воздухом, а штоковую с атмосферой.
Шток пневмоцилиндра 8 второй координаты 12 выдвигается, освобождая пневмораспределитель-датчик 10 второй координаты 12 и переключая в конце хода пневмораспределитель-датчик 9 второй координаты 12. Теперь камера управления пневмораспределителя 5 третьей координаты 13, камера управления пневмораспределителя 2 и камера управления пневмораспределителя 3 сообщаются с источником питания сжатым воздухом.
Пневмораспределители 2, 3 и 5 третьей координаты 13 переключаются. Пневмораспределитель 5 третьей коор.динаты 13, переключившись, сообщает штоковую полость пневмоцилиндра 8 третьей координаты с источником питания сжатым воздухом, а бесштоковую полость - с атмосферой.
Шток пневмоцилиндра 8 третьей координаты 13 втягивается, освобождая пневмораспределитель-датчик 9 третьей координаты 13 и переключая в И(.-ходном положении пневмораспределительдатчик 10 третьей координаты 13. Теперь камеры управления пневмораспределителя 5 второй координаты 12 и пневмораспределителя 7 сообщаются с источником питания сжатым воздухом.
Пневмораспределители 7 и 5 второй, координаты 12 переключаются. Пневмораспределитель 5 второй координаты 12, переключившись, сообщает штоковую полость пневмоцилиндра 8 втсфой
координаты 12 с источником питания сжатым воздухом, а бесштоковую - с атмосферой.
Шток пневмоцилиндра 8 второй координаты 12 втягивается, освобождая
пневмораспределитель-датчик 9 второй координаты 12 и переключая в исходном положении пневмораспределительдатчик 10 второй координаты.12. Теперь камера управления пневмораспределителя 5 первой координаты 11 сообщается с источником питания сжатым воздухом.
Пневмораспределитель 5 первой координаты 11 переключается в исходное
положение, сообщая штоковую полость пневмоцилиндра 8 первой координаты с источником питания сжатым воздухом, а бесштоковую полость - с атмосферой. Шток пневмоцилиндра 8 первой координаты 11 втягивается, освобождая пневмораспределитель-датчик 9 первой координаты 11 и переключая в исходном положении пневмораспределительдатчик 10 первой координаты Ijl.Teперь камера управления пневмораспределителя 5 четвертой координаты 14 и камера управления пневмораспределителя 2 сообщается с источником питания сжатым воздухом.
Пневмораспределители 2 и 5 четвертой координаты 14 переключаются в
исходное положение. Пневмораспределитель 5 четвертой координаты 14, переключившись, сообщает штоковую по-, лость пневмоцилиндра четвертой координаты 14 с источником питания сжатым воздухом, а бесштоковую полость - с атмосферой.
Шток пневмоцилиндра 8 четвертой координаты 14 втягивается, освобождая пневмораспределитель-датчик 9 четвертой координаты 14 и переключая в исходном положении пневмораспределитель-датчик 10 четвертой координаты 14. Теперь камера управления пневмо
распределителя 6 и камера управления пневмораспределителя 4 сообщаются с источником питания сжатым воздухом. Пневмораспределители 4 и б переключаются в исходное положение. Цикл окончен. Предложенное изобретение позволит упростить устройство. Формула изобретения Устройство для циклового управлени я манипулятором, содержащее разделительный клапан, первый, второй и третий управляющие пневмораспределители и по каждой регулируемой координате четвертый управляющий пневмо распределитель, первый и второй ввод и вывод которого соединены, соответст венно с выводом и вводом пневмоцилиндра, связанного через шток с первым и вторым пневмораспределителемдатчиком, причем выводы первого и второго пневмораспределителя-датчика подключены соответственно первой регулируемой координаты к первому и второму вводу первого управляющего пневмораспределителя, второй регулируемой координаты к первому вводу второго управляющего пневмораспределителя и третьему и второму вводу со ответственно первого и второго управ ляющего пневмораспределителя,третьей регулируемой координаты к первому и второму вводу третьего управляющего пневмораспределителя, а четвертый регулируемой координаты к третьему вводу третьего управляющего пневмораспределителя и четвертым вводам первого и третьего управляющего распределителя, первый ввод разделительногд клапана соединен со. входом устройства, второй ввод - с первым выводом первого управляющего пневмораспределителя, а вывод - с третьим в-водом второго управляющего пневмораспределителя, первым и вторым выво дом подключенного ко второму и третьему вводу четвартого пневмораспределителя первой регулируемой координаты, второй вывод первого управляющего пневмораспределителя и вывод третьего управляющего пневмораспределителя соединены соответственно со вторыми третьим вводом четвертого управляющего пневмораспределителя второй регулируемой координаты, о тличающееся тем, что, с целью упрощения устройства, оно содержит пятый и шестой управляющие пневмораспределители, первый и второй выводы которых подключены соответственно ко второму и третьему вводу четвертого управляющего пневмораспределителя третьей и четвертой регулируемы.х координат, первый, вто-рой и третий ввод пятого управляющего распределителя соединены соответственно с выводом второго пневмораспределителя-датчика четвертой регулируемой координаты, второго пневмораспределителя-датч;яка второй регулируемой координаты и первого пневмораспределителя-датчика четвертой регулируемой координаты, а первый, второй и третий ввод шестого управляющего пневмораспределителя подключены соответственно к выводам второго пневмораспределителя-датчика третьей регулируемой координаты, первого пневмораспределителя-датчика первой регулируемой координаты и первого пневмораспределителя-датчика третьей регулируемой координаты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 415642, кл. G 05 В 19/00, 1974. 2. Hydraulics Pnevmatics, 1979, vol 17, № 5,с. 5 (прототип).
