(S) ТРУБОГИБ01МАЯ М/УИИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1981 |
|
SU988410A1 |
| Станок-автомат для двусторонней гибки труб | 1985 |
|
SU1271611A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Устройство для гибки труб | 1987 |
|
SU1454542A1 |
| Трубосварочный стан для производства труб в бухтах | 1979 |
|
SU990363A1 |
| Устройство для гибки ошипованныхТРуб | 1979 |
|
SU837470A1 |
| Трубогибочный механизм | 1991 |
|
SU1821263A1 |
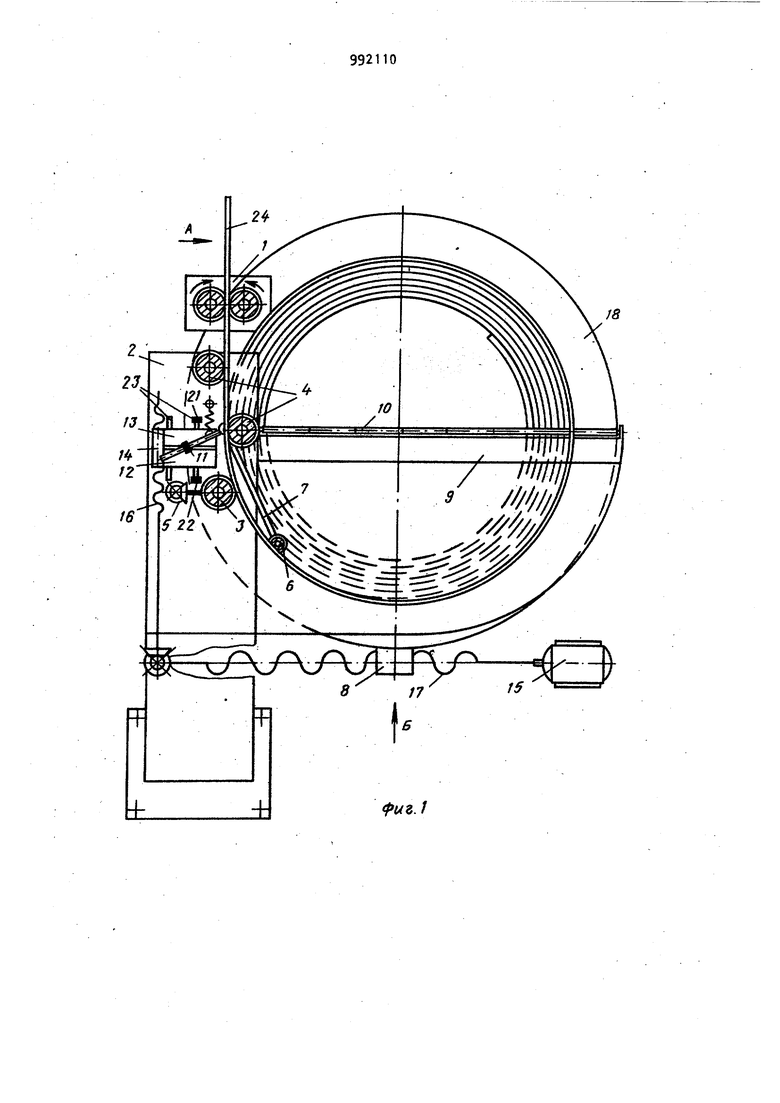
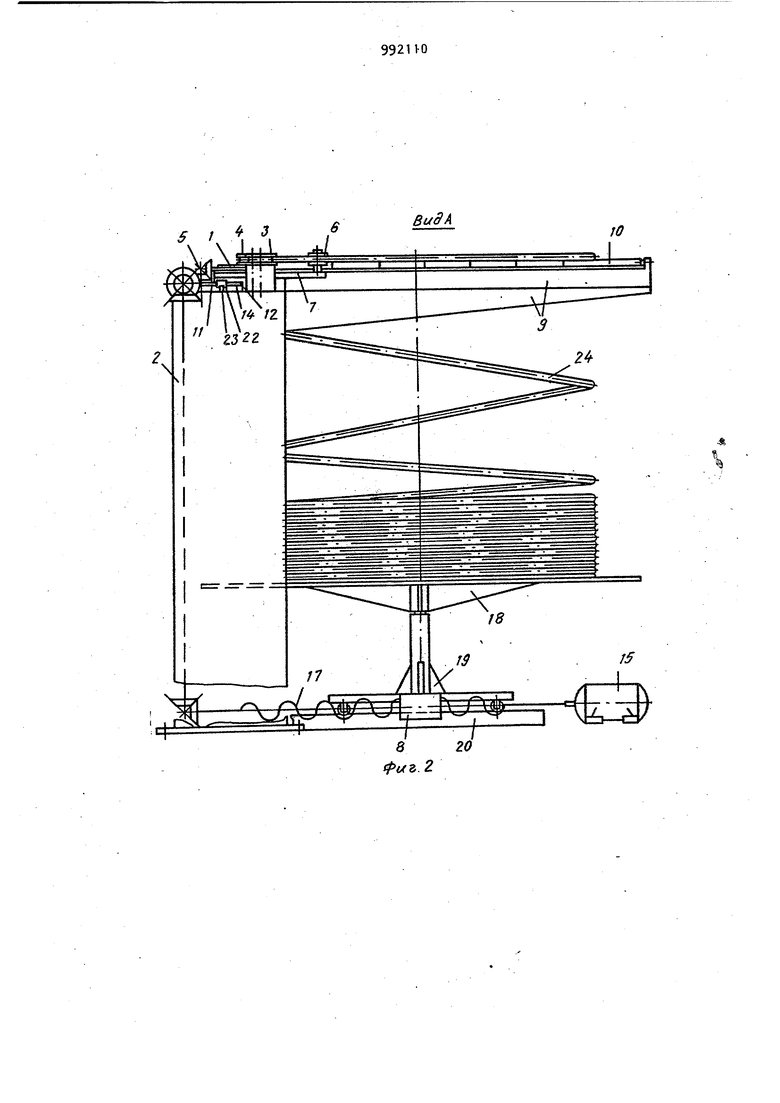
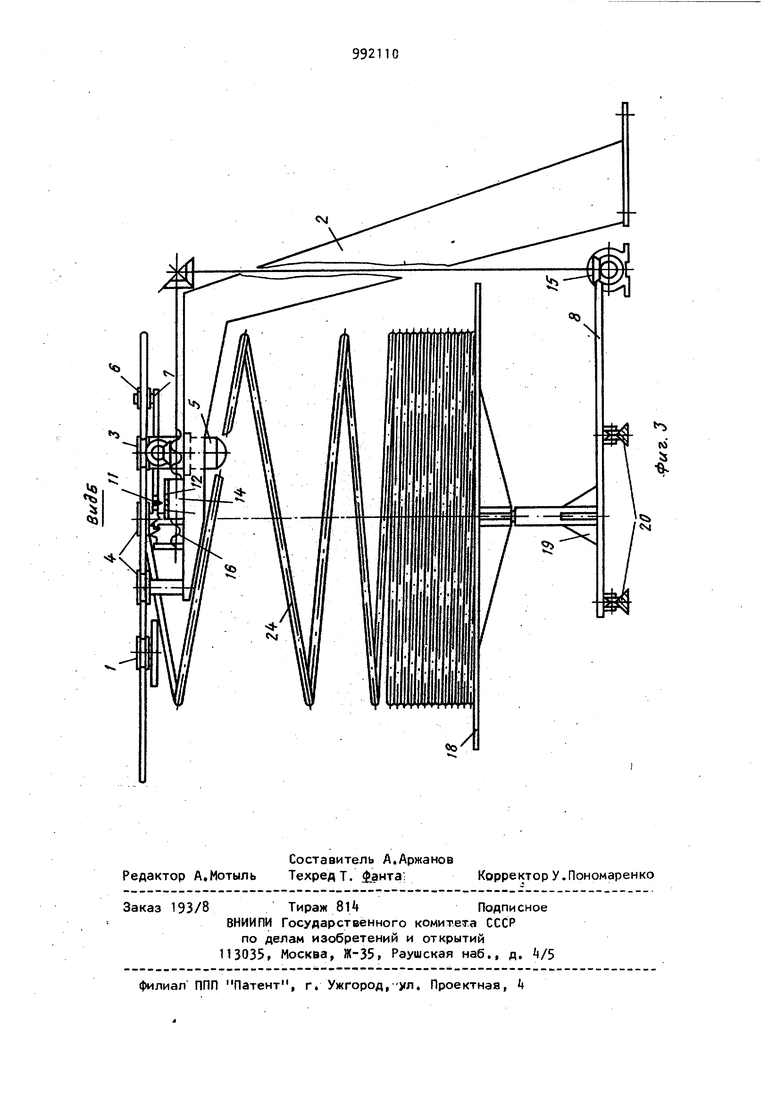
Изобретение относится к обработке металлов давлением и, в частности, к устройствам для гибки и свертывания труб в бухты. Известна установка для смотки прю волоки, содержащая гибочный узел, им ющий гибочный диск, гибочные и прижимные ролики, электропривод и приемное устройство 1.. Недостатком данного устройства является то, что на нем невозможно обеспечить получение различных диаметров бухт, а также отсутствует механизм раскладки, что приводит к пер хлестыванию витков бухты. Известна также трубогибочная ма,шина, содержащая рУму7 установленные на раме задающее устртаЧство, механиз изгиба, имеющий гибочкшй ролик с при водом его перемещения, следящий роJMK с поводком и приемное устройство 2. Недостатки данного устройства невозможность гнутья труб большой /Ц1ИНЫ (порядка нескольких сот мет- : ров) и приема труб, свернутых в бухты. Кроме того, при смотке труб большой дликш необходима компактная раскладка бухты, что невозможно выполнить на этом устройстве. Недостатком данного устройства является также невозможность обеспечения определенного диаметра бухты независимо от изменения механических свойств изгибаемых труб. Цель изобретения - исключение захлестывания витков изгибаемой трубы, обеспечение заданного диаметра бухты из труб и прутков с различными механимескими свойствами и обеспечение соосности бухты и приемного устройства. Указанная цель достигается тем что трубогибочная машина снабжена консольно закрепленной на раме направляющей для трубы, приводом возвратно-поступательного перемещения приемного устройства, установленной на 399 раме и связанной с приводом возвратно-поступательного перемещения приемного устройства платформой с ограничителями ее перемещения, а также ограничителями перемещения гибочного ролика, связанными с приводом перемещения последнего. Кроме того, один из ограничителей перемещения гибочного ролика установ лен на поводке с возможностью перемещения вдоль последнего, а остальные- на платформе,. На фиг, 1 представлено устройство в плане, на фиг, 2 -, вид по стрел ке А на фиг. 1, на фиг. 3 вид по стрелке Б на фиг, 1. Трубогибочная машина имеет в своем составе задающее устройство 1, ра мещенный на раме 2 механизм изгиба, выполненный в виде одного гибочного ролика 3 и двух опорно-направляющих роликов k. Гибочный ролик 3 имеет привод 5 перемещения, управляемый следящим роликом 6, установленным на подпружиненном поводке 7. Под плоскостью гиба расположено приемное уст ройство 8 для изгибаемых труб. На ра ме 2 для удержания последнего витка трубы в плоскости гиба и образования свободно висящей спирали бухты консольно установлена направляющая 9 имеющая поддерживающий ролик 10, На поводке 7 установлен ограничитель 11 перемещения гибочного ролика 3 ограничители перемоцеиия 12 и 13 гибочного ролика 3, выполненные, например, в виде металлических пластин, установлены на платформе 1, Платформа 14 связана с приемным устройством 8 для изгибаемых труб через общий реверсивный привод 15 перемещения с величиной по соотношению 5л, где S - величиI IV-z на перемещения приемного устройства изгибаемых труб, R) и R,- максималь ный и минимальный радиусы получаемых бухт, L - длина поводка до следящего ролика, L - длина поводка до установле ного на нем ограничителя перемещения гибочного ролика. Общий привод 15 перемещения может быть выполнен, например, в виде ходовых винтов 1б и 17. Пр.иемное устройство 8 для изгибаемых труб выполнено в виде свободно вращающейся фигурки 18, размещенной под плоскостью гиба в опоре 191 кото рая установлена на направляющих 20, .4 При сборке трубогибочной машины определенным положением гибочного ролика 3 подпружиненного поводка 7f ограничителя 11 перемещения, платформы , ходовых винтов 1б и 17 опоры 19 выполняется условие соосности бухты и приемного устройства 8 для изгибаемых труб. При компактной раскладке бухты из труб большой длины привод 15 перемещения через синхронизирующее устройство (не- показано) связан с задающим устройством 1, причем реверс привода 15 перемещения осуществляется ограничителями 21 и 22 перемещения платформь Н, установленными на ее направляющих 23. Ограничитель 11 перемещения гибочного ролика 3 выполнен с возможностью его перемещения вдоль поводка. 7 и фиксации.в любой заданной точке. Устройство работает следующим образом. До поступления трубы к гибочному ролику 3 отводят вправо следящий ролик 6 (фиг,1) до соприкосновения О(- раничителей 11 и 12 перемещения, включается привод 5 перемещения гибочного ролиКа 3 который и перемещает гибочный ролик 3 влево. После прохода переднего конца трубы 2k за гибочный ролик 3 освобождают следящий ролик 6 и он под действием подпружиненного поводка 7 прижимается к трубе 2k, в результате ограничитель 11 перемещения соприкасается с ограничителем 13 перемещения, включив, тем самым, привод 5 перемоцения гибочного ролика 3 на реверс и перемещает гибочный ролик 3 до тех пор, пока труба 2k- через следящий ролик 6 не размыкает ограничители 11 и 13 перемещения, т.е. по достижении необходимого диаметра бухты. Далее, передний конец трубы 2k скользит по направляющей 9, затем по поддерживающему ролику 10, После выхода переднего конца трубы за поддерживающий ролик 10 он под действием собственного веса по спиральной траектории опускается до соприкосновения с фигуркой. 18, укладывается на нее и начинается 1роцесс накопления бухты. Соосность бухты и приемного устройства для изгибаемых труб 8 определено положением платформы 1 и общим приводом 15 перемещения. Заданный диаметр бухты определен положением следящего ролика 6, В
5,99
случае отклонения диаметра бухты от заданнопо ограничитель 11 перемещения соприкасается с ограничителем
12перемещения или с ограничителем
13перемещения и привод 5 устанавливает гибочный ролик 3 в положение, соответствующее заданному диаметру гнутья трубы 2k,
В случае компактной раскладки (в виде плоских спиралей, расположенных одна над другой) реверсивный привод 15 перемещения объеди1няется с приводом задающего устройства (не показано), В этом случае привод 15 работает при работе привода задающего устройства 1. Платформа 1 перемещается, например, вверх (фиг, 1) до тех пор, пока не нажмет на ограничитель 21 Перемещения платформы, который переключает привод 15 на ревере. Затем цикл повторяется в противопложную сторону .ДО соприкосновения платформы k с ограничителем 22 перемещения платформы и т.д.
Во время работы привода 15 перемещается платформа 1. Изменение положения платформы 1 приводит к смещению ограничителей 12 и 13 перемещения гибочного ролика 3 относительно ограничителя 11, с результате вклю чается привод 5 и перемещения гибоч№1Й ролик 3, диаметр изгибаемой трубыспирально меняется. Диаметр трубы плавно изменяется, одновременно с эти перемещается приемное устройство 8 изгибаемых труб и выhoлняeтcя условие соосности с бухтой.
Предлагаемая трубогибочная машина обеспечивает гибку и свертку труб в бухты без захлестывания витков изгибаемых труб, получение заданного диа106
метра бухты из труб и прутков с различными механическими свойствами.
Формула изобретения
1, Трубогибомная машина, содержащая раму, установленные на раме задающее устройство, механизм изгиба, имеющий гибочный ролик с приводом его перемещения, следящий ролик с поводком и приемное устройство, отличающаяся тем, что, с целью исключения захлестывания витков изгибаемой грубы, обеспечения заданного диаметра бухты из труб и прутков с различными механическими свойствами и обеспечения соосности бухты и приемного устройства, она снабжена консольно закрепленной на раме направляющей для трубы, приводом возврно-поступательного перемещения приемного устройства, установленной на раме и связанной с приводом возвратно-поступательного перемещения приемного устройства платформой с ограничителями ее перемещения, а также ограничителями перемещения гибочного ролика связанными s приводом перемещения последнего.
2« Машина по п. 1, отличающаяся тем, что один из ограничителей перемещения гибочного ролика установлен на поводке с возмож ностью перемещения вдоль последнего, а остальные - на платформе.
Источники информации, принятые во внимание при экспертизе
tfuz.1
ВидА
I / tnrx
j ГХ
820
.2
