(54) УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ЕМКОСТЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки емкос-ТЕй | 1979 |
|
SU798007A1 |
| Устройство для передачи штучных грузов с одного подвесного конвейера на другой | 1975 |
|
SU607764A1 |
| ПЕРЕДВИЖНОЙ БОКОВОЙ ОПРОКИДЫВАТЕЛЬ БОРТОВЫХ ГРУЗОВЫХ АВТОМОБИЛЕЙ | 1967 |
|
SU195958A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И ШТАБЕЛИРОВАНИЯ РАМОЧНОЙ ТАРЫ ДЛЯ СВАРОЧНЫХ ЭЛЕКТРОДОВ | 1993 |
|
RU2070155C1 |
| Опрокидыватель для разгрузки сыпучих грузов из несамоходных судов | 1976 |
|
SU600059A1 |
| Штанговый конвейер | 1986 |
|
SU1419957A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| Опрокидыватель автомобилей | 1977 |
|
SU662464A1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |

1
Изобретение относится к устройствам для разгрузки емкостей и может быть использовано в пищевой, строительной и других отраслях народного хозяйства.
По основному авт. св. № 798007 известно устройство для разгрузки емкостей, содержащее подающий конвейер для емкостей, опрокидыватель емкости с роликами на его внутренней поверхности, установленный на приводной оси, отводящие конвейеры для груза и порожних емкостей, причем опрокидыватель емкостей выполнен в виде С-образной камеры и снабжен жестко закрепленным на приводной оси поводком, взаимодействующим с камерой, центр тяжести которой смещен в. сторону подающего конвейера, а конвейер для порожних емкостей снабжен выдвижным упором для взаимодействия с камерой.
Недостатком известного устройства являются больщие габариты, которые при его эксплуатации обуславливают необходимость в больщой производственной площади.
Цель изобретения - повьгщение удобства обслуживания.
Это достигается тем, что устройство снабжено собачкой, которая установлена на свободном конце поводка с возможностью поворота в вертикальной плоскости и центр тяжести которой смещен относительно оси
5 поворота, закрепленными на Ловодке ограничителями поворота собачки, упором, расположенным под свободным концом собачки, и пластиной, устаноаденной на опрокидывателе с возможностью взаимодействия с упомянутыми упором и собачкой.
10
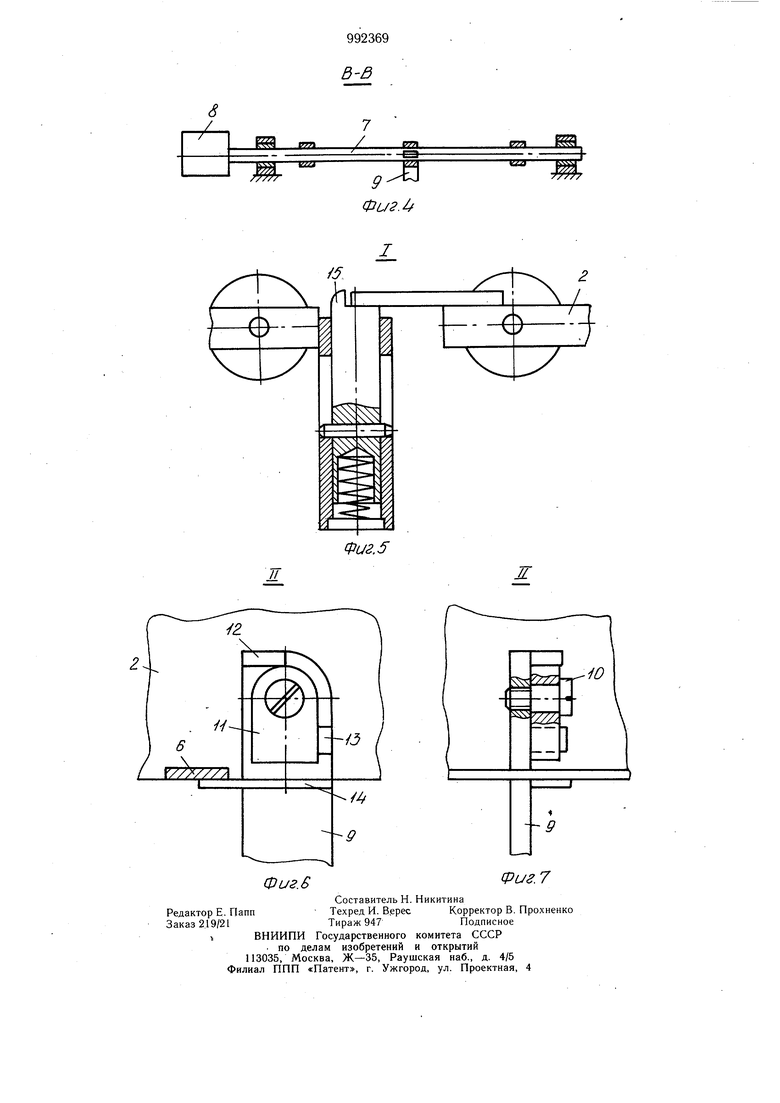
На фиг. 1 показано устройство, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3- разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2 (повернуто); на фиг. 5 - узел I на фиг. 1; на фиг. 6 - узел II на фиг. 3; на фиг. 7 - то же, вид сбоку.
Устройство содержит подающий конвейер 1 для емкостей, опрокидыватель 2, конвейер 3 удаления порожних емкостей и конвейер 4 удаления груза.
20 Опрокидыватель выполнен в виде С-образной камеры, оснащенной роликами 5,пластиной 6 и включает в себя приводную ось 7, привод 8. На приводной оси 7 жестко закреплен поводок 9, на свободном конце
которого на оси 10 установлена перекидная собачка 11. Собачка расположена между ограничителями 12 и 13 поворота и упором 14.
На стыке камеры опрокидывателя 2 с подающим конвейером 1 установлен подпружиненный отсекатель 15, а на стыке камеры с конвейером 3 удаления порожних емкостей установлен упор-амортизатор 16.
Подающий конвейер 1, камера опрокидывателя 2 и конвейер 3 установлены с уклоном в сторону транспортирования емкостей.
Ка.мера опрокидывателя 2 установлена с возможностью поворота относительно оси 7 и со смещением центра тяжести в сторону подающего конвейера 1.
Ось 10 поворота собачки смещена в сторону о|-раничителей относительно центра тяжестп собачки. Ограничители 12, 13 и ось 10 установлены так, что собачка имеет возможность поворачиваться в вертикальной плоскости по ходу движения поводка 9.
Упор 14 установлен на поводке 9 ниже свободного конца собачки 11 при ее исходном по;южении на величину, песколько большую толщины пластины 6, которая размещена с возможностью взаи.модействия попеременно с упором 14 и собачкой 11.
Подпружиненный отсекатель 15 и унорамО(ртизатор 16 установлены с возможностью взаимодействия с камерой опрркидываУстройство работает следующим образом.
Емкость 17 подающим конвейером 1 направляется в кал1еру опрокидывателя 2 по роликам 5. Включается привод 8 и посредством упора 14 поводок 9 поворачивает камеру опрокидывателя 2 по часовой стрелке относительно приводной оси 7. При этом собачка 11 опущена относительно оси 10 вниз и упирается в ограничитель 13. Поводок 9, благодаря смещению центра тяжести камеры, взаимодействует с камерой до момента свободного поворота ее под действием силы тяжести. При повороте камеры на определенный угол она получает свободное движение, опережая при этом движение поводка 9, и ударяется об упор-амортизатор 16.
При повороте ка.меры производится разгрузка е.мкости 17, а при ударе об амортизатор 16 - встряхивание и отделение груза от поверхности емкости.
Содержимое емкости разгружается на конвейер 4 удаления груза, а опрокинутая е.мкость по роликам 5, благодаря наклону камеры онрокидывателя 2, перемещается на конвейер 3 удаления порожних емкостей. Поводок 9 продолжает движение, а собачка 11 сохраняет свое прежнее положение. В процессе движения в положении поводка свободным концом вниз собачка 11, благодаря смещению ее центра тяжести отнод сительно оси 10 свободно падает на ограничитель 12.
При дальнейшем движении поводка вниз собачка приходит в соприкосновение с верхней плоскостью пластины 6, поворачивается относительно оси 10 и западает под нижнюю плоскость пластины 6.
Включается привод 8 в обратную сторону и камера онрокидывателя 2 захваты-. вается собачкой 11 и посредством поводка 9 движется в исходное положение. В положении поводка 9 свободным концом вверх камера опрокидывателя 2 пластиной 6 ложится на упор 14, а собачка 11 поворачивается относительно оси 10 до ограничителя 13.
Продолжая движение, камера опрокиды5 вателя воздействует на подпружиненный отсекатель 15, последний утопает и пропускает в камеру очередную емкость.
Привод 8 включается в обратную сторону, и цикл работы повторяется.
Предлагаемое устройство удобно в экс0 плуатации, поскольку в процессе работы опрокидыватель совершает неполный оборот, что не требует при его эксплуатации больших производственных площадей.
Формула изобретения
Устройство для разгрузки емкостей по авт. св. № 798007, отличающееся тем, что, с целью повышения удобства обслуживания,
оно снабжено собачкой, которая установлена на свободном конце поводка с возможностью поворота в вертикальной плоскости и ценфр тяжести которой смещен относительно оси поворота, закрепленными на поводке ограничителями поворота собачки, упором,
расположенным под свободным концом собачки, и пластиной, установленной на опрокидывателе с возможностью взаимодействия с упомянутыми упором и собачкой. РФФШШФ K.p.,;
Фиг.З &-В
