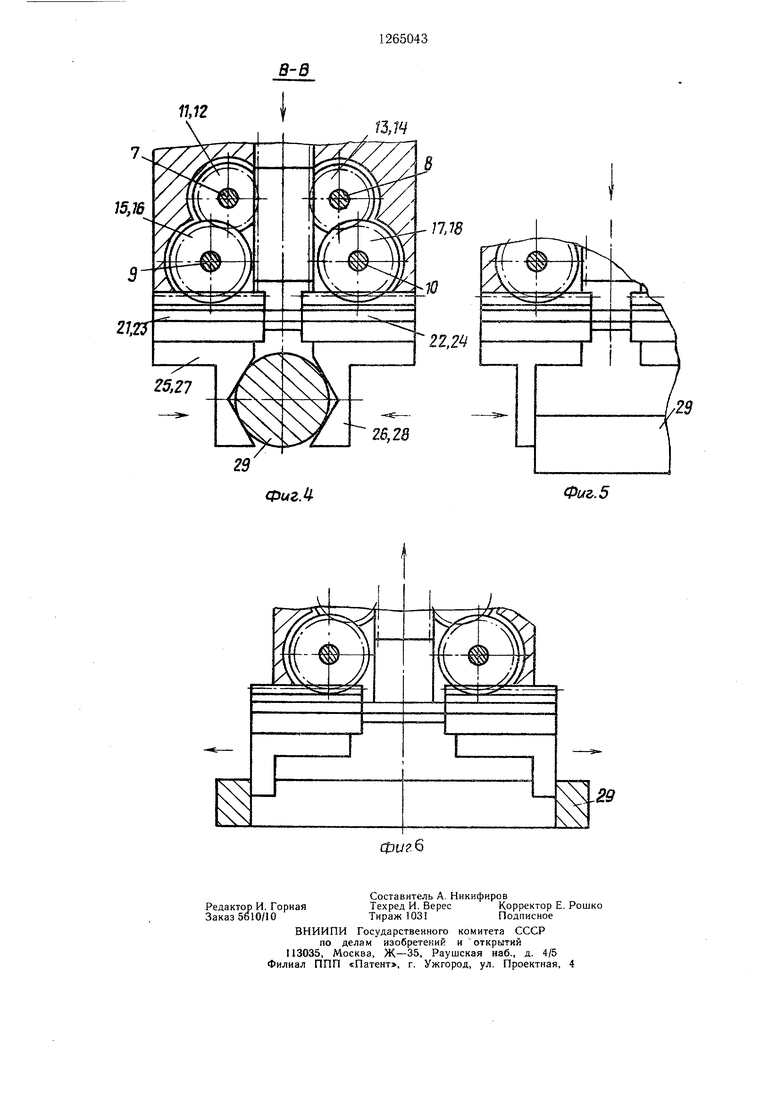
Изобретение относится к машиностроению, а именно к схватам промышленных манипуляторов. Цель изобретения - упрощение конструкции путем выполнения приводных реек трехсторонними и кинематической их связи с рейками губок и с приводом посредством сателлитной шестерни, размещенной на штоке с возможностью вращения. На фиг. 1 изображен схват, продольный разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 вид Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - захват детали по наружной поверхности; на фиг. 6 -захват детали по внутренней поверхности. Схват манипулятора состоит из корпуса 1, привода 2, например поршневого, штока 3, двух трехсторонних приводных реек 4 и 5. На конце штока 3 шарнирно смонтирована сателлитная шестерня 6, кинематически связывающая рейки 4 и 5 одну с другой и со штоком 3. В корпусе 1 на осях 7-10 смонтированы шестерни 11 -18. Шестерни И и 12, 13 и 14 находятся в зацеплении с рейками 4 и 5. Шестерни 11 и 15, 12 и 16, 13 и 17, 14 и 18 этажно расположены и попарно зацепляются. В нижней части корпуса 1 выполнены направляющие 19 и 20, в которых юпарно смонтированы рейки 21 и 22, 23 и 24. На рейках 21-24
А-А
Ф1/г,.2
Вид В
27
28
Фиг.З крепятся сменные губки 25 и 26, 27 -л 28. Схват захватывает деталь 29. Схват работает следующим образом. При движении штока 3 вниз, сателлитная ujecrepHH 6 перемещает рейки 4 и 5 вниз. Рейки 4 и 5 вращают шестерни 1 и 12, 13 и 14, которые, в свою очередь, вращают шестерни 15 и 16, 17 и 18. Шестерни 15- 18, вращаясь, радиально сводят рейки 2 и 22, 23 и 24 вместе с их губками 25 и 26, 27 и 28, зажимая деталь 29 по наружной поверхности. При захвате детали 29 по внутренней поверхности движение исполнительных механизмов происходит в обратном направлении. При захвате ступенчатой детали 29, например, ступенчатого вала, одна пара губок, захватившая больший диаметр, останавливается, например губки 25 и 26, и, соответственно, останавливаются и все элементы данной кинематической цепи. Однако шток 3 продолжает перемещаться и сателлитная шестерня 6 начинает перекатываться по остановившейся приводной рейке, продолжая перемещать, вторую приводную рейку и все элементы ее кинематической цепи до тех пор, пока вторая пара губок, например губки 27 и 28, не захватят деталь за меньший диаметр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Захват | 1977 |
|
SU667396A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Схват манипулятора | 1981 |
|
SU994253A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус, привод со штоком, на конце которого размещена сателлитная шестерня. приводные рейки, кинематически связанные посредством зубчато-реечиого механизма с рейками, на которых размещены губки, отличающийся тем, что, с целью упрощения конструкции, приводные рейки выполнены трехстороиними и кинематически связаны друг с другом и со штоком привода, при этом сателлитная щестерня установлена на штоке с возможностью вращения. S (Л tc О) ел о оо
| Захват манипулятора | 1979 |
|
SU891430A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
