(.54; БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочное устройство | 1982 |
|
SU1054694A2 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Балансировочное устройство | 1981 |
|
SU991207A1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Балансировочный станок с цифровым измерением угла дисбаланса | 1985 |
|
SU1295239A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Блок управления станком для балансировки роторов | 1985 |
|
SU1320676A1 |
Изобретение относится к балансировочной технике и может быть использовано в балансировочных автоматах и автоматических линиях с круговым движением транспорта, предназначенных для выполнения двух - трех циклов балансировки одного и того же ротора.
Известно балансировочное устройство, содержащее блок управления коррекцией и последовательно соединенные блок управления измерением, блок измерения и блок коррекции, второй вход которого соединен с выходом блока управления коррекцией, предназначенное для выполнения одного цикла балансировки коленчатого вала с последующим возвратом отбалансированного коленчатого вала на измерительную позицию для контроля остаточного дисбаланса .
Недостатком известного устройства является невысокая точность балансировки коленчатых валов, имеющих большой начальный дисбаланс, так как повторить цикл балансировки (про.пустить коленчатый вал по второму кругу) с одним и тем же комплектом оборудования не представляется возможным без необходимых переключений
в блоках измерения и коррекции из-за отсутствия запокшнающего балансировочного параметра предыдущего цикла балансировки.
Наиболее близким по технической сущности к изобретению является балансировочное устройство, содержащее последовательно соединенные блок управления измерением, а также блок
10 управления коррекцией, выход которого связан с вторым входом блока коррекции, двухканальный блок памяти, входы которого, соединены с выходами блока измерения, и двухканальный 15блок промежуточной памяти, включенный между блоком памяти и блоком управления коррекцией.
Каж;№Лй из каналов блока управления памяти выполнен из двух цепей,
20 каждая цепь содержит связанные между собой аналоговый ключ и запоминакяций блок 21.
Устройство характеризуется недос25 таточной балансировкой в связи с тем, что в блоке отсутствует регистрация циклов коррекции и измерения .
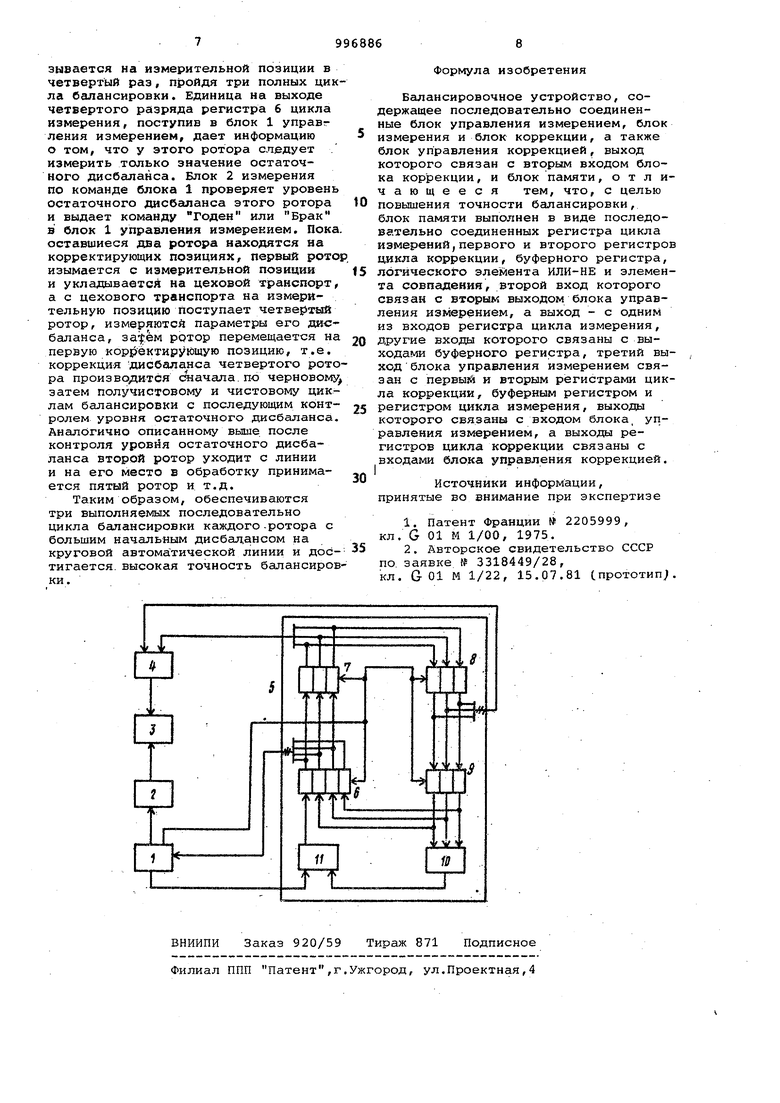
Цель изобретения - повышение точ30 ности балансировки. Поставленна цель достигается те что в балансировочном устройстве, содержащем последовательно соединенные блок управления измерением, блок измерения и блок коррекции, а также блок управления коррекцией, выход которого связан с вторым входом блока коррекции, и блок памяти, последний выполнен в виде последова тельно соединенных регистра цикла измерений, первого и второго регистров цикла коррекции, буферного регистра, логическо.го элемента ИЛИи элемента совпадения, второй вход которого связан с вторым выходом блока управления измерением, а выход -: с одним из входов регистра ци ла измерения, другие входы которого связаны с выходами буферного регист ра, третий выход блока управления измерением связан с первым и вторым регистрами цикла коррекции буфер- ным регистром и регистром цикла измерения, выходы которого связаны с входом блока управления измерением, а выходы регистров цикла коррекции связаны с входами блока управления коррекцией. На чертежеизображена схема балансировочного устройства. Устройство содержит последовательно соединенные блок 1 управлени измерением, блок 2 измерения и блок 3 коррекции, а также блок 4 управления коррекцией, выход которого связан с вторым входом блока 3 коррекции , и блок 5 памяти, который выполнен в виде последовательно сое диненных регистра б цикла измерений, выполненного четырехразрядным; первого регистра 7 цикла коррекции, второго регистра 8 цикла коррекции, буферного регистра 9, причем регист ры 7 , 8 и 9 выполнены трехразрядным логического элемента 10 ИЛИ-НЕ и элемента 11 совпадения, второй вход которого связан с вторым выходом бл ка 1 управления измерением, а выход с одним из входов регистра б цикла измерения, другие входы которого св заны с выходами буферного регистра 9, третий выход блока 1 управления измерением связан с первым 7 и втор 8 регистрами цикла коррекции, буфер ным регистром 9 и регистром 6 цикла измерений, выходы которого связаны с ВХОДОМ блока 1 управления измерением, а выходы регистров 7 и 8 цикла коррекции связаны с входами блока 4 управления коррекцией. Устройство работает следующим образом. Ротор (на чертеже не показан), впервые попавший на автоматическую линию, по соотношению начального и остаточного дисбаланса должен пройти три цикла балансировки: черновой ( первый ) получистовой (. второй и чистовой (третий), причем каждый из циклов производят, в разных плоскостях коррекции и с разными масштабами измерения и коррекции. Дисбаланс ротора измеряется блоком 2 измерения, содержащим датчики, масштабные усилители, схему разделения плоскоетей коррекции, опорный генератор, синхронные детекторы, индикаторы величин проекции (не показаны}. Команда в .блок 2 измерения о -номере цикла приходит из блока 1 управления измерением, в состав которого входят элементы, управляющие работой механизмов и блоков измерительной позиции, в том числе путевые переключатели, реле ,1 электродвигатели, электромагниты (. не показаны). Если ротор поступает на автоматическую линию с цехового транспорта, то он на входе линии переключает путевой переключатель и вблок 1 управления измерением поступает сигнал о наличии ротора на измерительной позиции. После.соответствующей обработки этот сигнаш выходит из блока 1 и поступает на вход элемента 11 совпадения. При от-. сутствии роторов на второй корректирующей позиции сигнал с выхода элемента 11 совпадения поступает на вход младшего разряда регистра б цикла измерений . Каждый разряд регистров выполнен на триггере с жесткой памятью и может быть реализован с помощью триггеров с магнитной или емкостной памятью или двухпозиционных реле(не показаны). Условно принимаем, что левый разряд каждого из регистров мпадЕпий и далее слева направо в каждом регистре более старший разряд. Поступив на вход младшего разряда регистра б, сигнал с выхода элемента 11 совпадения переключает триггер младшего разряда в единичное состояние, и с выхода регистра 6 цикла измерения поступает команда в блок 1 управления измерением, который включает в блоке 2 грубый масштаб измерения t так как цикл балансировки черновой J и переключает схему разделения плоскостей коррекции на соответствующие черновому циклу плоскости коррекции. После измерения дисбаланса блоком 2 измерения ротор перемещается на первую корректирующую позицию. Вместе с перемещением ротора вся информация о параметрах его дисбаланса перемещается в блок 3 коррекции, содержащий два аналоговых запоминающих блока (по числу корректирующих позиций) и элементы (не показаны) отсчета перемещений, и установки на угол ротора, на каждый из корректирующих пози- , ций. Команда на перемещение информации о параметрах дисбаланса формируется блоком 1 управления HSMepeHHeivr и обычно связывается с ходом транспорта автоматической линии. Тем же блоком формируется и последовательность команд для управления записью регистров блока 5 патти цикла. Сна- 5 чала дается команде на запись в буферный регистр 9 , затем во второй регистр 8 цикла коррекции, затем в первый регистр 7 цикла коррекции и далее в регистр 6 цикла измерения (кро- 10 ме у1адшего разряда). Для упрощения структурной cxeNbJ эти команды не разделены. После поочередного поступле- . НИН команды в каждый из регистров на управление записью младший разряд 15 первого регистра 7 цикла коррекции . повторяет состояние выхода младшего разряда, регистра Б цикла измерения и выдает в блок 4 управления коррекцией команду р том, что на пер- 20 вой корректирующей:позиции находится роторс черновым Циклом,балансировки. первая корректирующая позиция предназначена для коррекции дасбаланса, например, в левой половине 25 .ротора, а вторая - в. правой). В соответствии с полученной командой блок.4 управления коррекцией дает
команду на работу корректирующих головок чернового цикла (например, с п большим диаметром сверла и установленных в плоскостях коррекции чернового цикла), выполняет необходимые переключения для отсчета этих головок, подключает нг обходимые механизмы ( не показаны) ориентации ротора по углу. Одновременно с перемещением ротора с измерительной позиции на корректирующую на измерительную позицию поступает следующий ротор с. цехового транспорта не показан), и 0 лотадший разряд регистра б цикла измерения по аналогии с описанным выше остается в единичном состоянии и дает команду для измерения параметров дисбаланса второго ротора с чер- 45 новым циклом балансировки.
Если ротор на измерительную позицию не поступает, то младший разряд реги.стра 6 переключается в нулевое состояние и механизм измеритель- 50 ной. позиции не работает. Одновременно с коррекцией дисбаланса первого ротора производится замер дис- . баланса второго ротора. По аналогк-и с описанным выше после окончания 55 коррекции дисбаланса первого и измерения дисбаланса второго роторов Оба они перемещаются дальше по линии; первый-на корректирующую позицию, второй. - на первую кор- 60 ректирующую позицию Одновременно на измерительную позицию может поступить третий ротор с черновым циклом балансировки.Информация о параметрах дисбаланса первого ротора 5
996886
перемещается в блок 3 коррекции во второе аналоговое- зaпo lIинa(ccItee устройство, второго ротора - из блока 2 измерения в блок 3 коррекции, младшие разрядил регистров 6, 7 и 8 устанавливаются в единичное состойние по команде на управление записью от блока 1 управления измерением. Тепер в обработке на линии находятся уже три ротора: первый - на второй корректирующей позиции, второй - н.а первой корректирутацей позиции, а третий - на измерительной позиции. После окончания чернового цикла на каждой из позиций по аналогии с описанным выше транспорт линии перемещает роторы на следующие позиции: первый - на измерительную, второй вторую корректирующую, третий на первую oppeктиpyющyю. Одновременно происходит перемещение информации о параметрах дисбаланса второго и третьего роторов и запись состояний всех регистров. В соответствии с эти младший разряд буферного:регистра 9 устанавливается в единичное состояние , второй разряд регистра g цикла измерения - также в единичное состояние . Выход младшего разряда буферного регистра попадает на вход элемента 10 ИЛИ-НЕ, и на выходе последнего, появляется О, который через элемент 11 совпадения попадает на вход младцаего разряда регистра 6. Наличие в этом регистре одновременно нуля в первом разряде и единицы во втором анализируется блоком 1 управления измерением, вырабатывается команда на запрет поступления четвертого ротора на измерительную позицию (на ней уже находится ротор, прошедший черновой цикл балансировки), производятся необходимые переключения в блоке 2 измерения для измерения параметров дисбаланса ротора получистового цИкла балансировки. Режим работы из леняется: измерительная позиция цикла работает в получистовом цикле, а обе корректирующие - в черновом. По окончании работы всех позиций происходит перемещение информации и переключение регистров. При STOJM единицы будут в следующих разрядах регистров: буферного - в младшем разряде, цикла измерения - во втором,первого цикла коррекции - во втором второго цикла коррекции - в первом. Всоответствии с этим измерительная и первая корректирующая позиции работают в получистовом, а вторая корректирукяцая позиция-в черновом циклах. Таким o6pa3ON при перемещении по кругу трех роторов и всей информации о номере цикла и параметрах дисбаланса каждого из них наступает момент, когда первый из поступивших на линию роторов оказывается на измерительной позиции в четвертый раз, пройдя три полных цик ла балансировки. Единица на выходе четвертого разряда регистра 6 цикла измерения, поступив в блок 1 управг ления измерением, дает информацию о том, что у этого ротора следует измерить только значение остаточного дисбаланса. Блок 2 измерения по команде блока 1 проверяет уровень остаточного дисбаланса этого ротора и выдает команду Годен или Брак в блок 1 управления измерением. Пока оставшиеся два ротора находятся на корректирующих позициях, первый рото изымается с измерительной позиции и укладываетсА на цеховой транспорт а с цехового транспорта на измерительную позицию поступает четве| тый ротор, измеряютсй параметры его дисбаланса, ротор перемещается на первую коррёктируюшую позицию, т.е. коррекция дисбала нса четвертого рот ра производится сначала, по черновом затем получистовому и чистовому цик лам балансировки с последующим конт ролем уровня остаточного дисбаланса Аналогично описанному выше после контроля уровйя остаточного дисбаланса второй ротор уходит с линии и на его место в обработку принимается пятый ротор и т.д. Таким образом, обеспечиваются три выполняемых последовательно цикла балансировки каждого-ротора с большим начальным дисбалансом на круговой автоматической линии и дос тигается, высокая точность балансиро ки . Формула изобретения Балансировочное устройство, содержащее последовательно соединенные блок управления измерением, блок измерения и блок коррекции, а также блок управления коррекцией, выход которого связан с вторым входом блока коррекции, и блок памяти, о т л ичающееся тем, что, с целью повышения точности балансировки, блок памяти выполнен в виде последовательно соединенных регистра цикла измерений,первого и второго регистров цикла коррекции, буферного регистра, логического эле;мента ИЛИ-НЕ и элемента совпадения, второй вход которого связан с вторым выходом блока управления измерением, а выход - с одним из входов регистра цикла измерения, другие входы которого связаны с выходами буферного регистра, третий выход блока управления измерением связан с первый и вторым регистрами цикла коррекции, буферным регистром и регистром цикла измерения, выходы которого связаны с входом блока, управления измерением, а выходы регистров цикла коррекции связаны с входами блока управления коррекцией. Источники информации, принятые во внимание при экспертизе 1.Патент Франции № 2205999, кл. G 01 М 1/00, 1975. 2.Авторское свидетельство СССР по заявке № 3318449/28, кл. G- 01 М 1/22, 15.07.81 Спрототип;.
