Изобретение относится к непрерывному конвейерному транспорту и может быть использовано для передачи штучных грузов с подающего конвейера на перпендикулярно расположенный к нему принимающий конвейер.
Известно устройство такого назначения, содержащее подъемно-опускную платформу, один конец которой шарнирно закреплен на основании, а другой связан с приводом ее подъема и опускания, и передающие ролики, оси которых перпендикулярны оси принимающего конвейера (авт. св. N 461875, кл. В 65 47/52, 1975).
Однако это устройство имеет ограниченные технологические возможности.
Целью изобретения является расширение технологических возможностей за счет передачи грузов с опорными поперечными ребрами и транспортирования грузов только принимающим конвейером, осуществляемых в автоматическом режиме управления.
Для этого в известном устройстве, содержащем подъемно-опускную платформу, одним концом шарнирно закрепленную на основании, а другим концом связанную с приводом ее подъема и опускания, и передающие ролики, подъемно-опускная платформа выполнена в виде ряда гибких бесконечных тяговых элементов, расположенных между передающими роликами и ориентированных вдоль подающего конвейера, в конце подъемно-опускной платформы имеется управляющая подпружиненная рейка с загнутым концом, расположенная над ее рабочей поверхностью вдоль принимающего конвейера, и датчик приема груза, электрически связанный с приводом подъемно-опускной платформы, при этом загнутый конец подпружиненной рейки выполнен выступающим за габариты подъемно-опускной платформы.
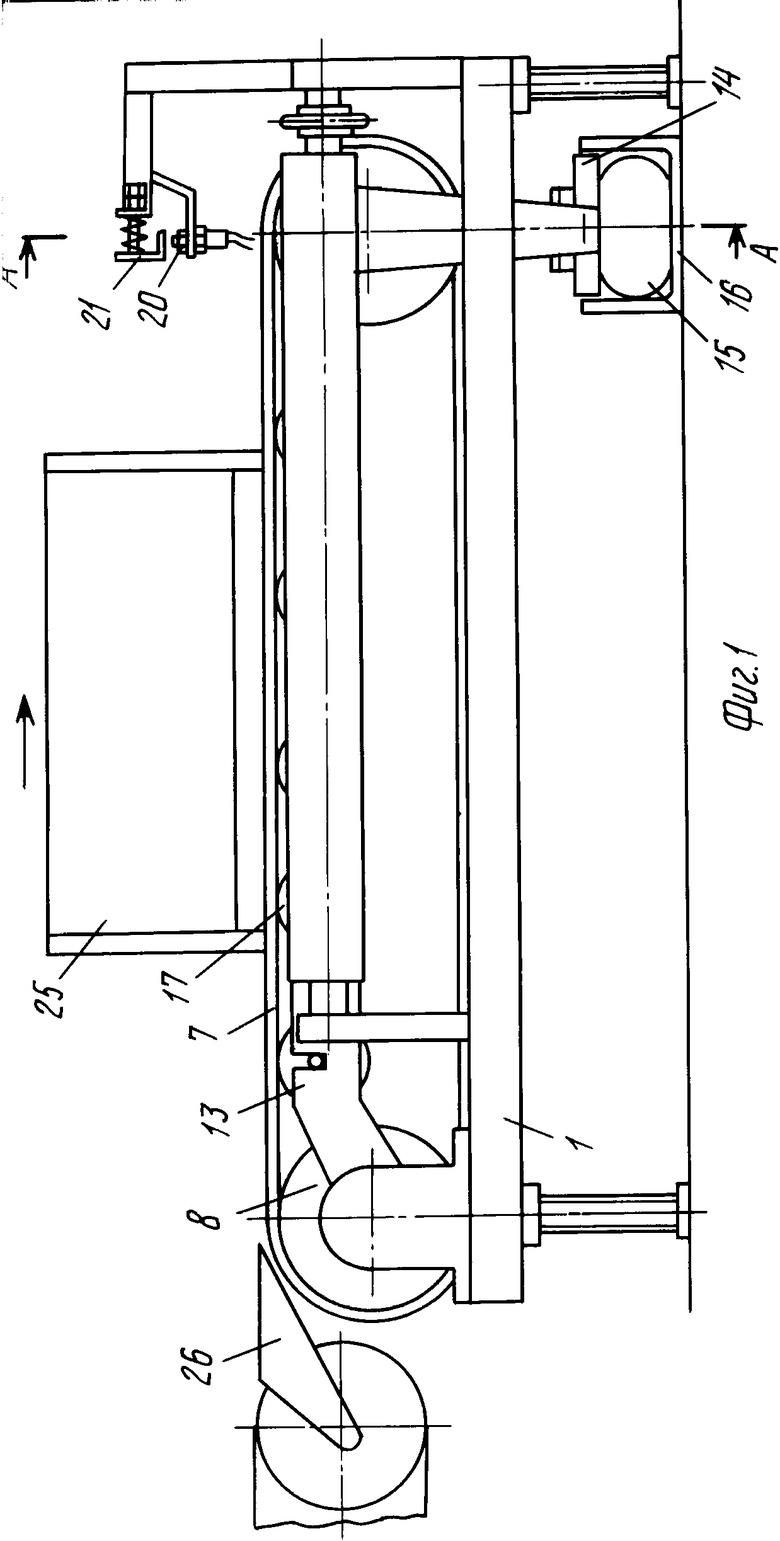
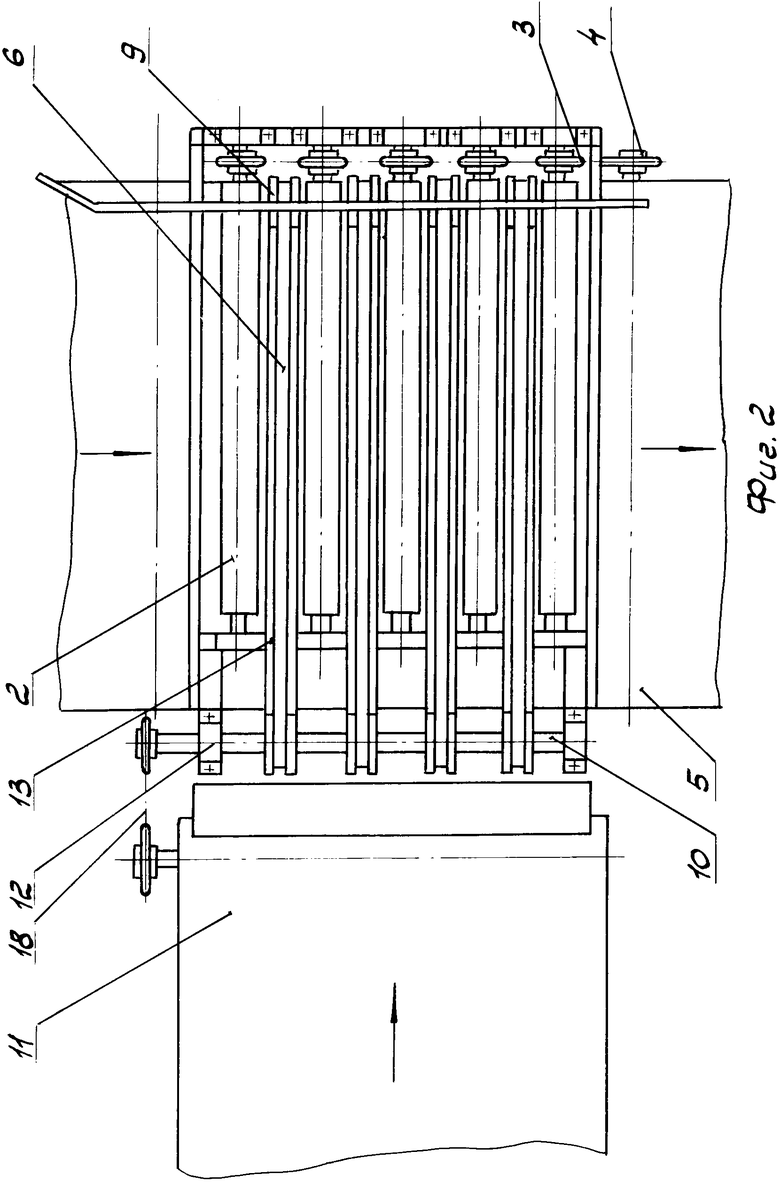
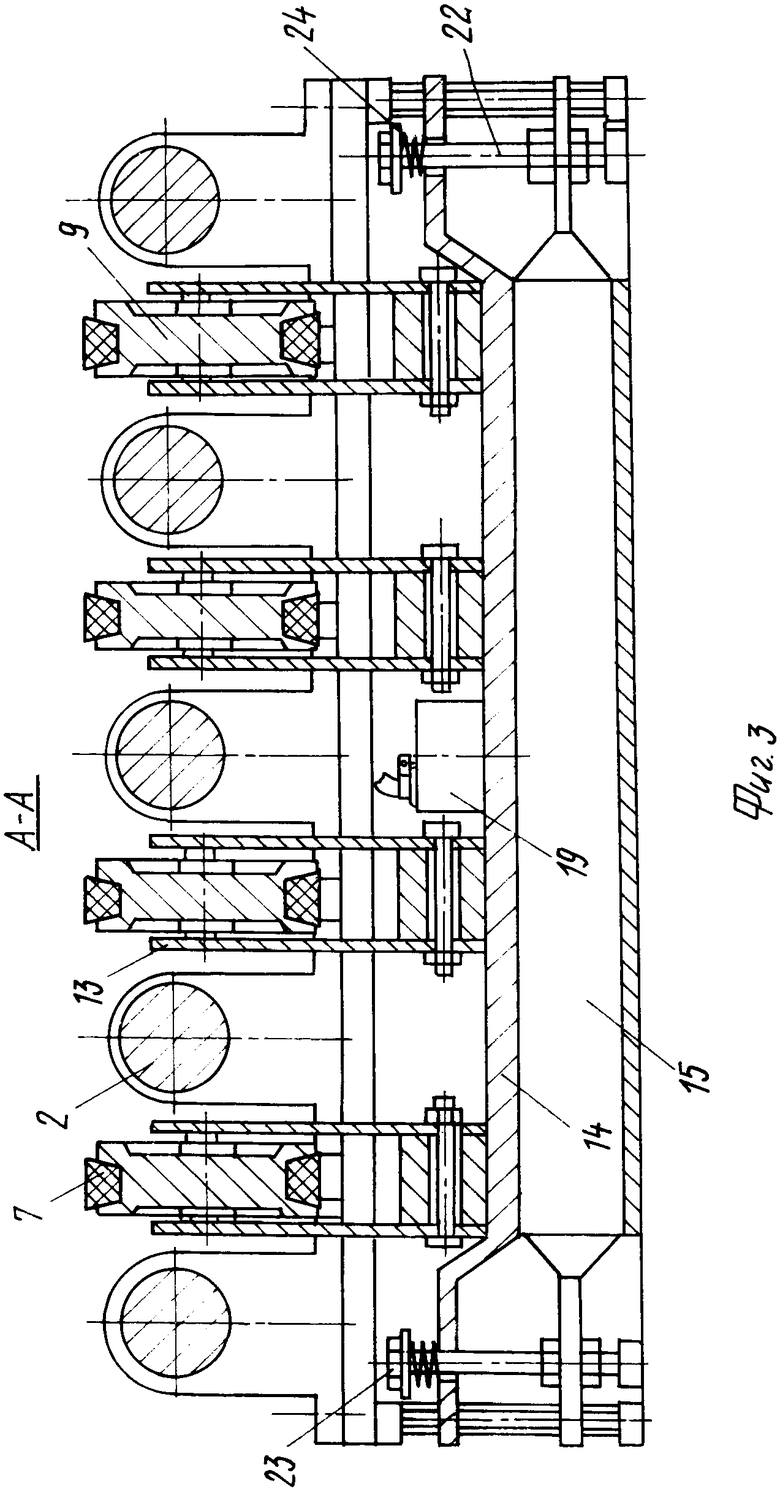
На фиг. 1 изображено предложенное устройство в исходном положении с грузом, вид сбоку; на фиг. 2 - то же, без груза, вид сверху; на фиг. 3 - сечение А-А на фиг. 1.
Устройство содержит основание в виде рамы 1, на которой установлены приводные подающие ролики 2 со звездочками 3, кинематически связанными с приводной звездочкой 4 принимающего конвейера 5, а также подъемно-опускная платформа 6. Несущая поверхность платформы 6 выполнена в виде ряда бесконечных ремней 7, установленных на шкивах 8 и 9, расположенных в начале и конце платформы 6. Шкивы 8 насажены на приводной вал 10, установленный со стороны подающего конвейера 11, в подшипниках 12, укрепленных на концах щек 13, расположенных по обе стороны каждой пары шкивов 8 и 9. Одни концы щек свободно установлены на валу 10, а концы щек, несущие шкивы 9, шарнирно связаны с плитой 14, опирающейся на надувную опору 15, выполненную в виде герметичного рукава, уложенного в прямоугольный желоб 16. Между щеками установлены ролики 17 для поддерживания ремней 7. Оси подающих роликов 2 расположены перпендикулярно оси принимающего конвейера 5, а ремни 7 со щеками 13 - между роликами 2 вдоль подающего конвейера 11. Привод вала 10 с ремнями 7 осуществляется через цепную передачу 18 от подающего конвейера 11. Надувная опора 15 сообщена с пневмосетью (не показано) через электропневмоклапан 19. Высота опоры 15 выбрана такой, что при подаче в нее воздуха несущая поверхность ремней 7 находилась бы выше уровня роликов 2, а при сбрасывании давления из опоры 15 платформа 6 опускалась бы ниже уровня этих роликов.
Управление электропневмоклапаном 19 осуществляется с помощью бесконтактного датчика 20 и металлической подпружиненной рейки 21, электрически взаимодействующей с ним. Рейка 21 выполнена в форме лыжи и установлена на раме 1 в конце платформы 6 над ее рабочей поверхностью, при этом загнутый конец рейки 21 выполнен выступающим за габариты подъемно-опускной платформы и обращен навстречу движению принимающего конвейера 5. В продольном направлении плита 14 и надувная опора 15 ориентированы с помощью стоек 22, пропущенных через отверстия, выполненные соответственно в плите 14 и отбортовках опоры 15. Последняя дополнительно зафиксирована гайками 23 на стойках 22. Для исключения заклинивания плиты 14 и обеспечения плавных перемещений платформы 6 плита 14 подпружинена относительно стоек 21 с помощью пружин 24. Для плавной передачи груза 25 с подающего конвейера 11 на подъемно-опускную платформу 6 между ними установлен склиз 26.
Устройство работает следующим образом.
В исходном положении надувная опора 15 сообщена с пневмосетью и подъемно-опускная платформа 6 занимает горизонтальное положение, при этом несущая поверхность платформы 6, образуемая ремнями 7, располагается выше уровня роликов 2. С включением подающего конвейера 11 приводятся в движение ремни 7. Груз 25 с подающего конвейера 11 через склиз 26 поступает на подъемно-опускную платформу 6 и, перемещаясь далее на ремнях 7, нажимает на рейку 21. Срабатывает датчик 20, подающий сигнал на электропневмоклапан 19, который сбрасывает давление воздуха из надувной опоры 15. При этом платформа 6, поворачиваясь на валу 10, опускается и груз ставится на подающие ролики 2, которыми он переводится на принимающий конвейер 5. Освободившись от груза, рейка 21 возвращается в исходное положение, датчик 20 отключается и электропневмоклапан 19 сообщает надувную опору с пневмосетью. Подъемно-опускная платформа 6 поднимается в исходное положение. В случае транспортировки груза принимающим конвейером 5 он при подходе к подъемно-опускной платформе также нажимает на рейку 21, что вызывает аналогичное опускание платформы 6 и свободный пропуск груза через устройство с помощью роликов 2.
Использование изобретения позволяет передавать груз с поперечными опорными ребрами и пропускать грузы по принимающему конвейеру.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ И РАСФОРМИРОВАНИЯ ПАКЕТОВ ИЗДЕЛИЙ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1992 |
|
RU2025429C1 |
| Устройство для передачи изделий с конвейера на конвейер | 1975 |
|
SU647202A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛЫХ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1991 |
|
RU2023604C1 |
| Устройство для кантования и передачи деревянных щитов между роликовыми конвейерами | 1990 |
|
SU1801897A1 |
| Ленточный конвейер | 1986 |
|
SU1411229A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
Изобретение предназначено для транспортировки грузов ленточно-роликовыми конвейерами. Сущность изобретения: устройство содержит основание с передающими роликами и подъемно-опускную платформу с приводом. Несущая поверхность платформы выполнена в виде ряда гибких приводных ремней, расположенных между передающими роликами вдоль направления движения подающего конвейера. При перегрузке или транспортировке по принимающему конвейеру груз воздействует на подпружиненную рейку с датчиком приема груза, который подает команду на опускание платформы ниже уровня передающих роликов. 3 ил.
УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С ПОДАЮЩЕГО КОНВЕЙЕРА НА ПЕРПЕНДИКУЛЯРНО РАСПОЛОЖЕННЫЙ ПРИНИМАЮЩИЙ КОНВЕЙЕР, включающее подъемно-опускную платформу, одним концом шарнирно закрепленную на основании, а другим концом связанную с приводом ее подъема и опускания, и передающие ролики, оси которых перпендикулярны к оси принимающего конвейера, отличающееся тем, что подъемно-опускная платформа выполнена в виде ряда гибких бесконечных тяговых элементов, расположенных между передающими роликами и ориентированных вдоль подающего конвейера, в конце подъемно-опускной платформы имеется управляющая подпружиненныя рейка с загнутым концом, расположенная над ее рабочей поверхностью вдоль принимающего конвейера, и датчик приема груза, электрически связанный с приводом подъемно-опускной платформы, при этом загнутый конец подпружиненной рейки выполнен выступающим за габариты подъемно-опускной платформы.
| Устройство для передачи изделий с одного конвейера на другой | 1972 |
|
SU461875A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
