| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват робота | 1987 |
|
SU1407799A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
Изобретение относится к машиностроению, а именно к промьшшенным роботам и манипуляторам, предназначенным для механизации и автоматизации технологических процессов, и может быть использовано во всех отраслях народного хозяйства для захвата и транспортирования различных объек- товь Цель изобретения - упрощение условий эксплуатации и повышение надежности работы. Устройство состоит из привода механизма схвата манипулятора робота в виде пневмогидроцилин- дра 1 и двух губок 2 и 3 произвольной конфигурации, причем губка 3 выполнена подвижной вдоль оси захватного устройства. С приводом схвата манипулятора робота жестко связан кожух 4, к которому крепится неподвижная губка 2.. В кожухе 4 размещена пружина 5, i (Л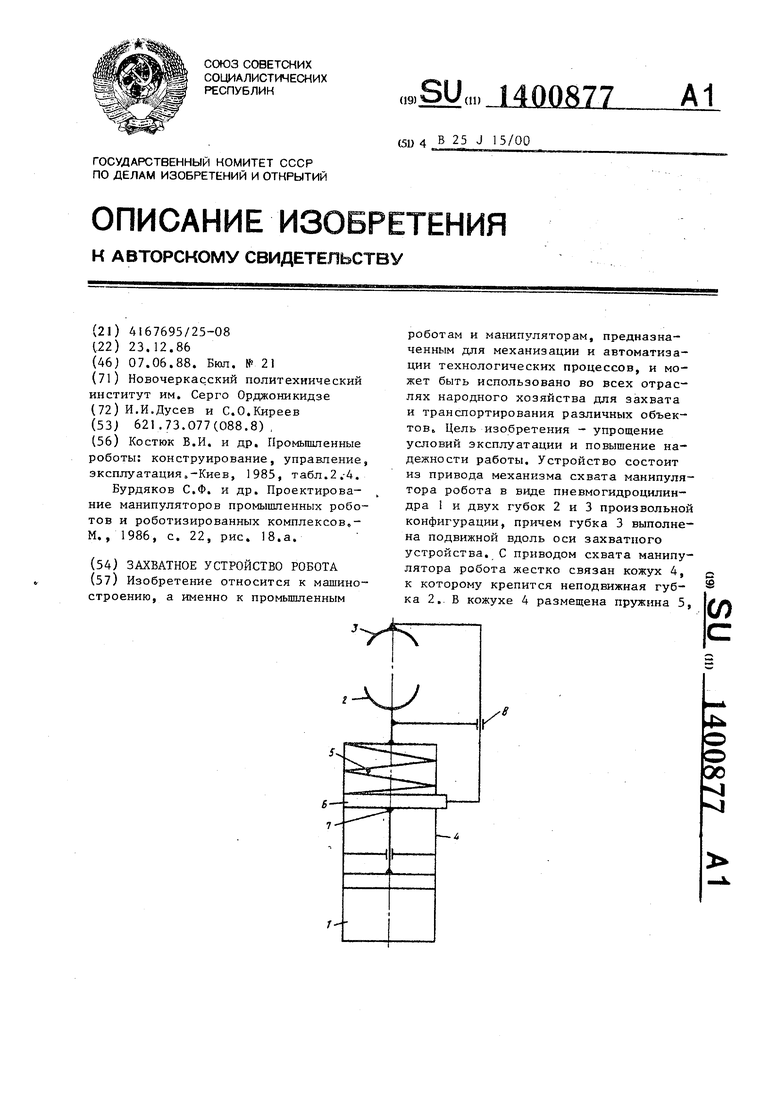
воздействующая на перемещающийся в кожухе 4 ползун 6, который связан через шарнир 7 со штоком исполнительного механизма 1. К.ползуну 6 жестко крепится подвижная губка 3, Второй ее опорной точкой является направляю.
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для механизации и автоматизации технологических процессов, и может быть использовано во всех отраслях народного хозяйства для захвата и транспортирования различных объектов.
Цепь изобретения - упрощение уело ВИЙ эксплуатации и повьш1ение надежности работы робота.
На чертеже изображена принципиальная схема захватного устройства ро- .бота,,
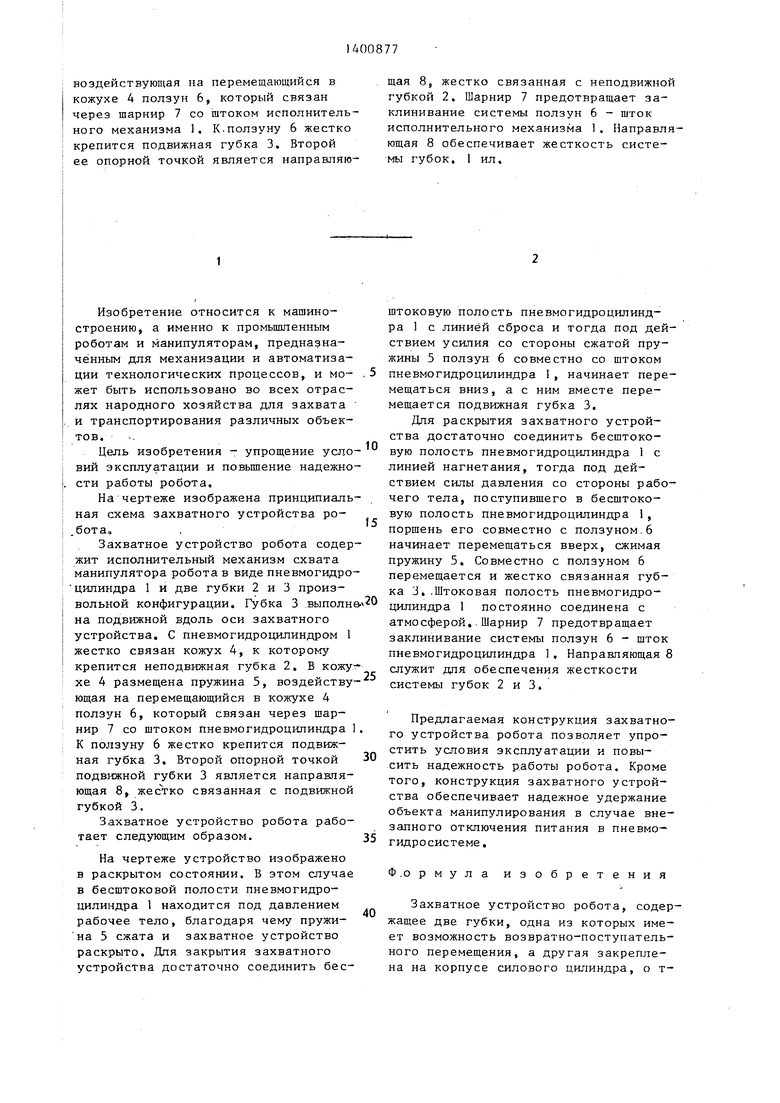
Захватное устройство робота содержит исполнительный механизм схвата манипулятора робота в виде пневмогидро- цилиндра 1 и две губки 2 и 3 произвольной конфигурации. Губка 3 выполне на подвижной вдоль оси захватного устройства, С пневмогидроцилиндром 1 жестко связан кожух 4, к которому крепится неподвижная губка 2. Б кожу хе А размещена пружина 5, воздействующая на перемещающийся в кожухе 4 ползун 6, который связан через шарнир 7 со штоком пневмогидроцштиндра К ползуну 6 жестко крепится подвижная губка 3. Второй опорной точкой ПОДВ1-1ЖНОЙ губки 3 является направляющая 8, жес тко связанная с подвижной губкой 3.
Захватное устройство робота работает следующим образом.
На чертеже устройство изображено в раскрытом состоянии. В этом случае в бесштоковой полости пневмогидро- цилиндра 1 находится под давлением рабочее тело, благодаря чему пружи- на 5 сжата и захватное устройство раскрыто. Для закрытия захватного устройства достаточно соединить бесщая 8, жестко связанная с неподвижной губкой 2. Шарнир 7 предотвращает заклинивание системы ползун 6 - шток исполнительного механизма 1. Направляющая 8 обеспечивает жесткость системы губок. 1 ил.
10
15
.
30
35
40
штоковую полость пневмогидроцилинд- ра 1 с линией сброса и тогда под действием усилия со стороны сжатой пружины 5 ползун 6 совместно со штоком пневмогидроцилиндра 1, начинает перемещаться вниз, а с ним вместе перемещается подвижная губка 3.
Для раскрытия захватного устройства достаточно соединить бесштоко- вую полость пневмогидроцилиндра 1 с линией нагнетания, тогда под действием силы давления со стороны рабочего тела, поступившего в бесштоко- вую полость пневмогидроцилиндра 1, поршень его совместно с ползуном.6 начинает перемещаться вверх, сжимая пружину 5, Совместно с ползуном 6 перемещается и жестко связанная губка 3,.Штоковая полость пневмогидроцилиндра 1 постоянно соединена с атмосферой,. Шарнир 7 предотвращает заклинивание системы ползун 6 - шток пневмогидроцилиндра 1. Направляющая 8 служит для обеспечения жесткости системы губок 2 и 3.
Предлагаемая конструкция захватного устройства робота позволяет упростить условия эксплуатации и повысить надежность работы робота. Кроме того, конструкция захватного устройства обеспечивает надежное удержание объекта манипулирования в случае внезапного отключения питания в пневмо- гидросистеме,
Ф.ормула изобретения
Захватное устройство робота, содержащее две губки, одна из которых имеет возможность возвратно-поступательного перемещения, а другая закреплена на корпусе силового цилиндра, о т314008774
личающееся тем, что, сшарнирно связанным со штоком силовоцелью упрощения условии эксплуатацииго цилиндра, а губка, имеющая вози повышения надежности работы, ономожность возвратно-поступательного
снабжено ползуном, подпружиненным к перемещения, закреплена на ползу губке, закрепленной на корпусе, и.не.
| Костюк В.И | |||
| и др | |||
| Промьшшенные роботы: конструирование, управление, эксплуатация.-Киев, 1985, табл.2,-4, Бурдяков С.Ф | |||
| и др | |||
| Проектирование манипуляторов промышленных роботов и роботизированных комплексов,- М., 1986, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
