Изобретение относится к самонастраивающимся системам управления нестационарным объектом с эталонной моделью.
Целью изобретения является повышение быстродействия контуров адаптации параметров.
Рассматривают дифференциальное уравнение нестационарного объекта первого порядка = a(t)X +b(t)U1 (1) где а(t), b(t) - переменные во времени параметры; Х(t) и U1(t) - выходной и входной сигналы объекта.
= a(t)X +b(t)U1 (1) где а(t), b(t) - переменные во времени параметры; Х(t) и U1(t) - выходной и входной сигналы объекта.
Уравнение регулятора имеет
U1(t) = m(t)[U - k(t)Х], (2) где U(t) - сигнал задания; m(t), k(t) - переменные, настраиваемые контуром адаптации параметры, законы изменения которых необходимо определить.
С учетом уравнений (1) и (2) уравнение системы управления примет вид = [a(t) - b(t)m(t) k(t)]X + b(t)m(t)U
= [a(t) - b(t)m(t) k(t)]X + b(t)m(t)U
(3)
Задают уравнение эталонной модели системы управления (3) с постоянными параметрами а и b; = aXм+ bU (4) где Хм(t) - выход эталонной модели.
= aXм+ bU (4) где Хм(t) - выход эталонной модели.
Определяют



(5)
и записывают из уравнений (3) и (4) с учетом выражения (5) = aε + Δ k(t)X + Δm(t)U
= aε + Δ k(t)X + Δm(t)U
(6) где Δ k(t), Δ m(t) - текущие параметрические отклонения.
Настраивают параметры регулятора m(t) и k(t) по принципу отрицательной обратной связи:
k(t) = k(to) + Δ kн(t); (7)
m(t) = m(to) + Δ mн(t), где t ≥ to, Δkн(t), Δmн(t)- сигналы настройки.
Выбирают функцию Ляпунова
V = (κε2+Δkтр2+Δmтр2) 0,5, (8) где Δkтр(t) и Δmтр(t)- требуемые законы изменения текущих параметров Δk(t) и Δm(t) соответственно, определяемые из условия обеспечения устойчивости контура адаптации параметров регулятора.
Определяют производную функции Ляпунова =
=  + Δk
+ Δk + Δm
+ Δm (9) и подставляют значение
(9) и подставляют значение  (t) из уравнения невязки (6), положив в нем Δkн=Δkтр и Δmн=Δ mтр,
(t) из уравнения невязки (6), положив в нем Δkн=Δkтр и Δmн=Δ mтр, = κε (aε(+ ΔkтрX + ΔmтрU) + Δk
= κε (aε(+ ΔkтрX + ΔmтрU) + Δk + Δmтр·
+ Δmтр·  (10)
(10)
Для того, чтобы значение производной функции Ляпунова было определенно-отрицательным, требуется выполнение неравенств

 (11) откуда получают
(11) откуда получают


 (12)
(12)
Если k(t) и m(t) удовлетворяют соответственно Δ kтр(t) и Δ mтр(t), причем последние определены из выражения (12), то производная функции Ляпунова будет определенно-отрицательной, так как b(t), m(t) > 0: = κaε2 - κ
= κaε2 - κ
Если до включения контура адаптации текущие параметрические отклонения определены уравнениями (5), то после включения контуров адаптации с учетом уравнений (7) и условий (12) записывают

 (14)
(14)
где p =  - оператор дифференцирования, при этом
- оператор дифференцирования, при этом
Δkн(p)=κo ε(p)X(p) (1+p-1)
(15)
Δmн(p)=-κo ε(p)U(p) (1+p-1)
Чтобы показать, как действует контур адаптации, рассматривают частный случай уравнений (14). Пусть Δk(p) = 0, тогда можно записать при отсутствии интегральной составляющей
b(p) m(p)-b= b(p)κoε(p)U(p)+Δm(p), (16) при этом Δ m(p) находят из уравнения (6):
Δm(p) =  (17)
(17)
Далее выражают Δ mн(p) через Δ m(p):
Δmн(p) = - U2(p)κoΔm(p) +  (18) и подставляют Δ mн(p) в уравнение (5):
(18) и подставляют Δ mн(p) в уравнение (5):
b(p)m(p) - b + b(p)[ - U2(p)κoΔm(p) +  = Δm(p) (19) тем самым получают значение Δ m3(p) после замыкания контура адаптации:
= Δm(p) (19) тем самым получают значение Δ m3(p) после замыкания контура адаптации:
Δm3(p) =  m(p) -
m(p) -  / (U2(p)κob(p) + 1) (20)
/ (U2(p)κob(p) + 1) (20)
Из выражения (20) можно сделать вывод о том, что ошибка контура адаптации при непрерывно изменяющемся параметре объекта управления b(p) не равна нулю.
Таким образом, при устойчивом контуре адаптации основной контур управления может стать неустойчивым. Это происходит в том случае, если отклонение параметров Δ m(p) будет таким, что реальная модель движения системы будет вида = aX + [b+Δm3(t)]U (21) с параметрами, которые не могут обеспечить устойчивость движения системы. Поэтому в завершение синтеза устойчивого контура адаптации необходимо оценить предельные значения Δ m3(t) и использовать теорему Харитонова В.Л. для выяснения интервальной устойчивости. Если параметры уравнения (21) удовлетворяют теореме Харитонова В.Л., то система управления всегда устойчива.
= aX + [b+Δm3(t)]U (21) с параметрами, которые не могут обеспечить устойчивость движения системы. Поэтому в завершение синтеза устойчивого контура адаптации необходимо оценить предельные значения Δ m3(t) и использовать теорему Харитонова В.Л. для выяснения интервальной устойчивости. Если параметры уравнения (21) удовлетворяют теореме Харитонова В.Л., то система управления всегда устойчива.
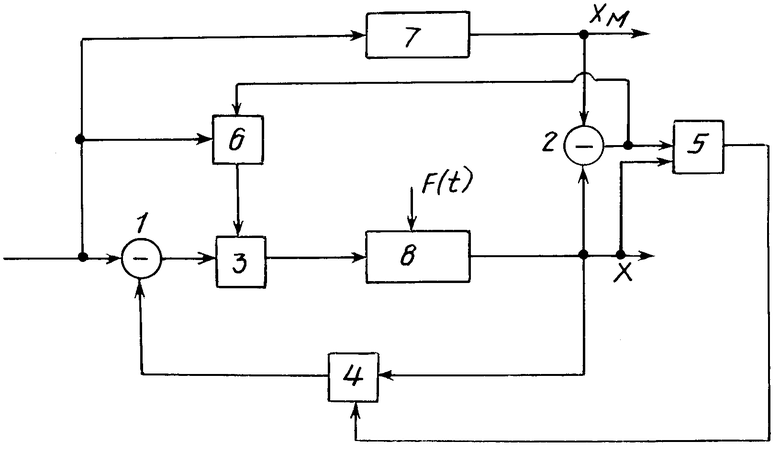
На чертеже представлена функциональная схема системы управления.
Система содержит первый и второй блоки 1 и 2 сравнения, первый и второй блоки 3 и 4 с переменным коэффициентом усиления, первый и второй блоки 5 и 6 настройки параметров системы, эталонную модель 7 системы и объект 8 управления.
Работает система управления следующим образом.
Входной сигнал U(t) поступает на вход модели 7 объекта управления и вход блока 1 сравнения, на второй вход которого поступает сигнал с выхода объекта 8 управления, усиленный в блоке 4 с переменным коэффициентом усиления. Сигнал с выхода блока 1 сравнения поступает на вход блока 3 с переменным коэффициентом усиления, сигнал с выхода последнего является сигналом управления для объекта 8 управления. В случае отклонения параметров последнего под действием параметрического возмущения F(t) возникает рассогласование ε (t), равное разности сигналов с выхода объекта 8 управления - Х(t) и с выхода эталонной модели 7 - Хм(t), которые поступают на входы блока 2 сравнения. Сигнал невязки ε (t) c выхода последнего поступает на входы блоков 5 и 6 настройки, на вторые входы которых поступают соответственно управление U(t) и сигнал Х(t) c выхода объекта 8 управления. Сигналами с выходов блоков 5 и 6 настройки при отклонении параметров системы от модельных производится подстройка коэффициентов усиления в блока 3 и 4 с переменными коэффициентами соответственно.
Таким образом, установка блока 3 с переменным коэффициентом после блока 1 сравнения позволяет повысить быстродействие процесса адаптации параметров за счет того, что блок 5 настройки компенсирует влияние параметрических отклонений матрицы В(t) как в прямой цепи регулирования, так и в обратной.
Кроме того, применен подход к синтезу контуров адаптации на основе идеи параметрической отрицательной обратной связи с применением второго метода Ляпунова, который позволяет снять ограничения на скорость изменения параметров объекта (не вводить гипотезу о квазистационарности параметров объекта), получить производную функции Ляпунова, явно показывающей сходимость процедур адаптации параметров как по сигнальному ε (t) отклонению, так и по параметрическому, учесть в процессе синтеза пропорционально-интегрального закона адаптации параметров объекта управления и скорости изменения настраиваемых коэффициентов усиления на динамику системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| СИСТЕМА НЕПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2381539C2 |
Изобретение относится к самонастраивающимся системам управления нестационарным объектом. Цель изобретения - повышение быстродействия контуров адаптации системы, которая достигается тем, что система дополнительно содержит второй блок настройки параметров системы. 1 ил.
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ, содержащая первый блок сравнения, выход которого соединен с информационным входом первого блока с переменным коэффициентом усиления, а первый вход является входом системы и через эталонную модель системы подключен к первому входу второго блока сравнения, второй вход которого соединен с выходом объекта управления, являющимся выходом системы и подключенным к информационному входу второго блока с переменным коэффициентом усиления и первому входу первого блока настройки параметров системы, второй вход которого соединен с выходом второго блока сравнения, а выход подключен к управляющему входу второго блока с переменным коэффициентом усиления, отличающаяся тем, что в нее введен второй блок настройки параметров системы, первый и второй входы которого соединены соответственно с входом системы и выходом второго блока сравнения, а выход подключен к управляющему входу первого блока с переменным коэффициентом усиления, выход которого подключен к входу объекта управления, выход второго блока с переменным коэффициентом усиления подключен к второму входу первого блока сравнения.
| Борцов Ю.А | |||
| и др | |||
| Электро-механические системы с адаптивным и модельным управлением | |||
| Л.: Энергоатомиздат, 1984, с.83, рис.3.8. |
