Изобретение относится к системам управления нестационарным нелинейным объектом с помехой аддитивного характера, поступающей на вход системы и недоступной для измерения.
Цель изобретения - повышение точности, упрощение и расширение области применения системы.
Рассмотрим нестационарный нелинейный объект управления;
2 ai(x , ui.t)xO) +Ј,(t)
b(x,u 1 ,t)u 1,
(1)
где ai,b - неизвестные нелинейные и нестационарные параметры объекта;
ui -скалярное управление;
Јг неизвестная помеха.
Уравнение регулятора выберем в виде
ul(t) m(t)u-k(t)(t)x. (2)
где ni(t), k(t) и ki(t)- настраиваемые.парамет- ры регулятора;
x(t), x(t) n(t)-измеряемые выходные величины и вход системы управления. Запишем уравнение системы:
ОО
2 (x tui,t)x +|r(t).+.
.
+ а 1 (х , u i ,t) + b(x, u i ,t)x+ (x,ui,t) + b(x,ui,t)k(t)i b(x,ui,t)m(t)o+2 |i(t). (3)
- I о
Выберем уравнение эталонной модели xjU(t) u.(4)
Далее обозначим Ј(t)A x-x/«,ai(x,ui,t) +
+ b(x,ui,t)ki(t)Ј + ki(t) а0(х, u i ,t) + b(x, u 1, t)
k(t) +Ak(t),
,b(x,ui ,t)m(t) 1 +Am(t). (5)
c о ч
t
I
ki(t)-A(ex + exdt),
to
С учетом (5) из (3) и (4) запишем e Am.u-Akx-Akix +
У 8|.(x.ui;t)x() +f Јl(t). (6)5 m(t) 1-A(ex +-4iЈil+j udt). (и)
-- П1 T л . tn
Od
I
I 2
ki(t)-A(ex + exdt),
to
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Система экстремального управления | 1988 |
|
SU1550474A1 |
Изобретение относится к системам управления с адаптацией параметров регулятора. Цель изобретения - повышение точности, упрощение и расширение области применения системы. Система содержит шесть умножителей, -четыре сумматора, объект управления, дифференциатор и три регулятора. 1 ил.
Будем настраивать параметры регулятора по принципу отрицательной обратной связи
|k(t)-k(t0)+AkH(t), k(t0) 1 ki(t)ki(t0) + AkiH(t), ki(t0) o U(t)m(to)+.AmH(t). m(t0) 1. ()
Для определения значений AkH(t) ;. AkiH(t)n A mH(t) составим уравнение компенсации невязки е (t) согласно (6)
(t)u -AkH(t)x -AkiH(t)x. (8) Обозначим e AmH(t)u -Aki,(t)x -AkiH(t)x.(9) Выберем градиент
I АеЈн,(Ю)
а значения параметров будет полагать такими, чтобы уменьшить в каждый момент времени градиент (9), например для параметрического приращения AkH(t}:
AMO- -znrr+J-jsb
; .. Из (11) с учетом (9) запишем:
AkH(t) -А(сх + /Јxd(t).
to
Или окончательно с учеюм (7) запишем алгоритм адаптации параметров регулятора
k (t) 1 - А ( f х Ч- ), -( } к х d t) ,
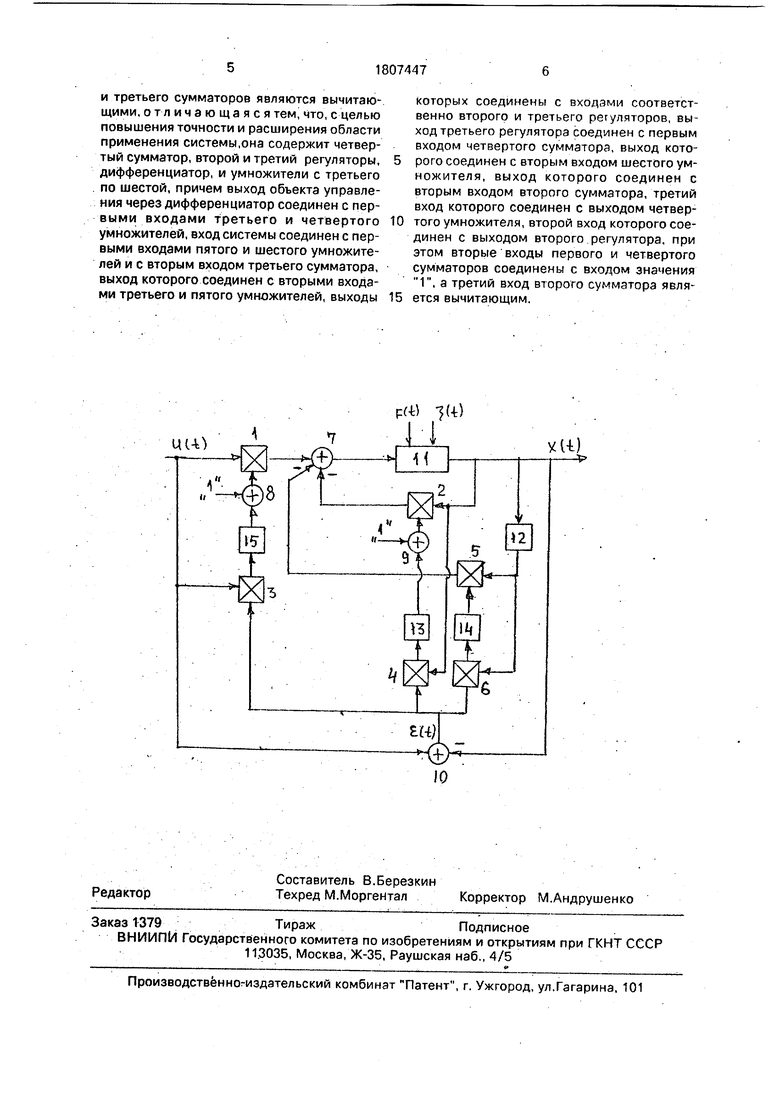
Схема предложенной системы .представлена на чертеже.
Система содержит умножители 1-6, сумматоры 7-10, объект 11 управления, дифференциатор 12 и регуляторы 13-1.5, например ПИД-регуляторы u(t}-входной сигнал системы, x(t) - выходной сигнал объекта управления, Ј(t) - помеха, F(t) - параметрическая помеха.
Система работает следующим образом.
Входной сигнал u(t) поступает на входы умножителей 1 и 3 и на суммирующий вход сумматора 7, на вычитающий вход которого поступает выходной сигнал системы x(t). Сигнал e(t)c выхода сумматора 7 поступает на входы умножителей 3,4 и 6, в которых он умножается соответственно на u(t), x(t) и x(t). Результат перемножения с них поступает на входы регуляторов соответственно 15, 13 и 14. Затем сигналы с выходов регуляторов 15,13 и 14 поступают на входы умножителей 1 и 2 соответственно через сумматоры 8 и 9, и на вход умножителя 5 непосредственно (см.чертеж). В умножителях 1,2 и 5 происходит перемножение сигналов, поступивших на первые входы с сигналами соответственно u(t), x(t)n x(t). Сигнал x(t) получается путем дифференцирования сигнала x(t) в дифференциаторе 12. Таким образом, на входе объекта управления 11 получается сигнал, полученный на выходе сумматора 7 в виде (2), где сигналы m(t), k(t) и ki(t) определены в (13). ......
Формула изобретения
Адаптивная система управления, содержащая объект управления, три сумматора, первый регулятор и два умножителя, причем выход первого умножителя соединен с входом первого регулятора, выход которого соединен с первым входом первого сумматора, выход которого соединен с первым входом второго умножителя, выход которого соединен с первым входом второго сумматора, выход которого соединен-с входом объекта управления, выход которого соединен с выходом системы, первым входом первого умножителя, вторым входом второго умножителя и первым входом третьего сумматора, выход которого соединен с вторым входом первого умножителя, при этом первые входы второго
и третьего сумматоров являются вычитающими, отличающаяся тем что, с целью повышения точности и расширения области применения системы,она содержит четвертый сумматор, второй и третий регуляторы, дифференциатор, и умножители с третьего по шестой, причем выход объекта управления через дифференциатор соединен с первыми входами третьего и четвертого умножителей, вход системы соединен с первыми входами пятого и шестого умножителей и с вторым входом третьего сумматора, выход которого соединен с вторыми входами третьего и пятого умножителей, выходы
0
5
которых соединены с входами соответственно второго и третьего регуляторов, выход третьего регулятора соединен с первым входом четвертого сумматора, выход которого соединен с вторым входом шестого умножителя, выход которого соединен с вторым входом второго сумматора, третий вход которого соединен с выходом четвертого умножителя, второй вход которого соединен с выходом второго,регулятора, при этом вторые входы первого и четвертого сумматоров соединены с входом значения 1. а третий вход второго сумматора является вычитающим.
| Саридис Дж | |||
| Самоорганизующиеся стохастические системы управления | |||
| - М.: Наука, 1980 | |||
| С | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Петров Б.Н | |||
| и др | |||
| Принципы построения и проектирования самонастраивающихся систем управления | |||
| - М.: Машиностроение, 1972 | |||
| С | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
