Изобретение относится к электротехнике, а именно к управлению электропроводами механизмов, трогание и стопорение которых должно производиться плавно в условиях изменения статической нагрузки в широких пределах.
Цель изобретения - повышение качества работы машины в режиме растормаживания электропривода.
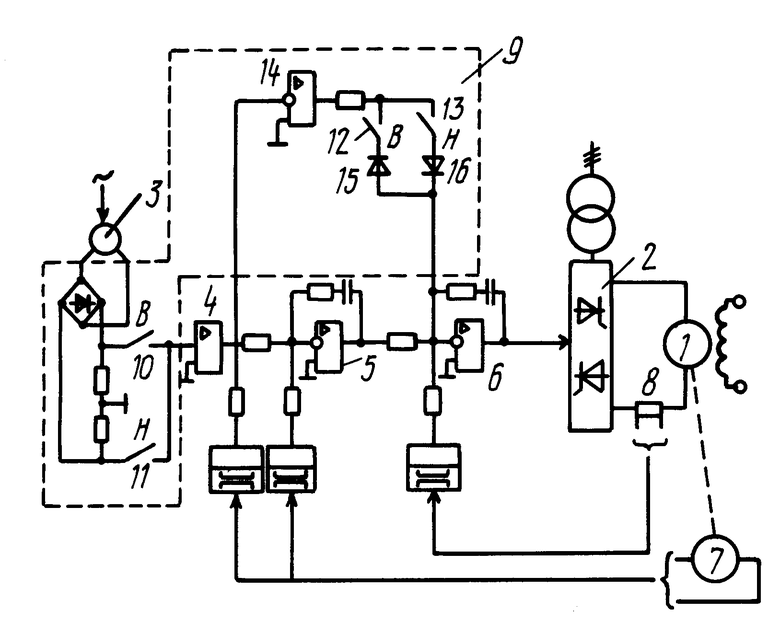
На чертеже показана схема электропривода.
Электропривод шахтной подъемной машины содержит электродвигатель 1 постоянного тока и тиристорный преобразователь 2 в цепь управления которого включены последовательно соединенные командоаппарат 3, задатчик 4 интенсивности, регулятор 5 скорости и регулятор 6 тока, а также датчики 7, 8 соответственно скорости и тока, подключенные к входам соответствующих регуляторов, и блок 9 определения направления вращения, первый вход которого подключен к выходу датчика 7 скорости, второй вход - к выходу командоаппарата 3, а его выход - к входу регулятора 6 тока. При этом блок 9 определения направления вращения содержит две пары параллельно включенных контактов направления движения, одна из которых (контакты 10 и 11 соответственно "В" и "Н") включена между выходом командоаппарата 3 и входом задатчика 4 интенсивности, а другая (контакты 12 и 13 соответственно "В" и "Н") - последовательно с усилителем 14 между выходом датчика 7 скорости и входом регулятора 6 тока, и два диода 15 и 16, включенные с различной полярностью последовательно с контактами направления движения второй пары.
Электропривод работает следующим образом.
Если электродвигатель 1 расторможен, а командоаппарат 3 выдал сигнал на задатчик интенсивности и замкнул контакты 10 и 12 "В", то за время отработки задающего сигнала задатчиком интенсивности, а затем регулятором скорости электродвигатель, если он будет иметь отрицательный статический момент, провернется в направлении, обратном заданному. На усилителе 14 появится сигнал от датчика 7 скорости, который усилится и отрицательной полярностью приложится к регулятору тока. Таким образом, регулятор тока получит сигнал, предотвращающий дальнейший проворот двигателя в направлении, противоположном заданному.
При дальнейшей работе дополнительный сигнал не вносит возмущений в работу электропривода. Изобретение позволяет уменьшить противоход подъемной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| Устройство для программногоупРАВлЕНия пРиВОдОМ | 1979 |
|
SU817668A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
Использование: в шахтных подъемных машинах. Сущность: в электроприводе в регулятор тока вводится дополнительный сигнал. Введение дополнительного сигнала обеспечивается только в том случае, если машина начала движение в направлении, противоположному заданному. Величина сигнала пропорциональна скорости электродвигателя. 1 ил.
ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ, содержащий электродвигатель постоянного тока и тиристорный преобразователь, в цепь управления которого включены последовательно соединенные командоаппарат, задатчик интенсивности, регулятор скорости и регулятор тока, а также датчики скорости и тока, подключенные к входам соответствующих регуляторов, и блок определения направления вращения, первый вход которого подключен к выходу датчика скорости, отличающийся тем, что, с целью повышения качества работы машины в режиме растормаживания электропривода, в него введен усилитель, второй вход блока определения направления вращения подключен к выходу командоаппарата, а его выход - к входу регулятора тока, при этом блок определения направления вращения содержит две пары параллельно включенных контактов направления движения, первая из которых включена между выходом командоаппарата и входом задатчика интенсивности, а вторая - последовательно с усилителем между выходом датчика скорости и входом регулятора тока, и два диода, включенные с различной полярностью последовательно с контактами направления движения второй пары.
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
