1
Изобретение относится к машиностроению, ..а именно к схватам манипулятора для обслуживания, в том числе для загрузки станков.
Известен захват манипулятора, снабженный корпусом с захватными рычагами, копирным устройством и приводом i.
Недостатком известного захвата является низкая надежность, обуславливаемая тем, что при снятии зажимного усилия схват сам раскрывается, позволяя детали падать.
изобретения - повышение надежности;
Указанная цель достигается тем, что в корпусе захвата выполнены пазы, захватные рычаги снабжены опорами, помещенными в эти пазы, копирное устройство выполнено в виде охватывающей захватные рычаги, установленной с . возможностью поворота вокруг продольной оси захвата обоймы, внутренняя поверхность которой представляет собой
копир, а на поверхности захватных рычагов выполнены выступы, предназначенные для взаимодействия с этим копиром.
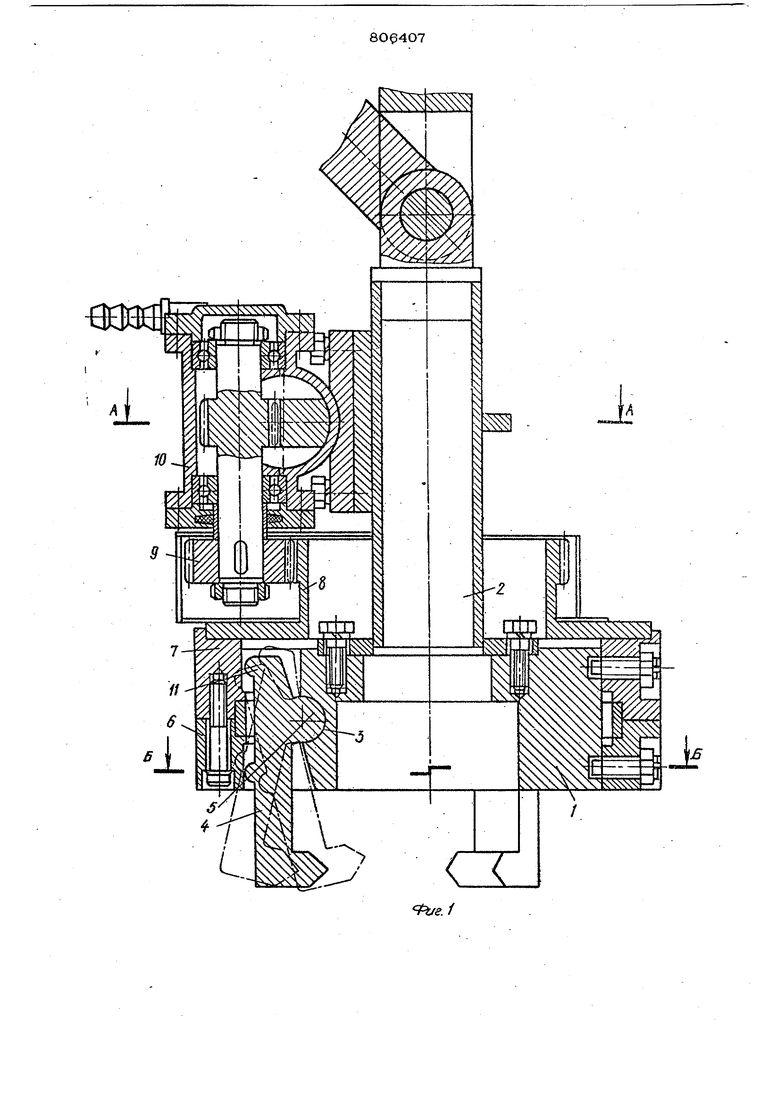
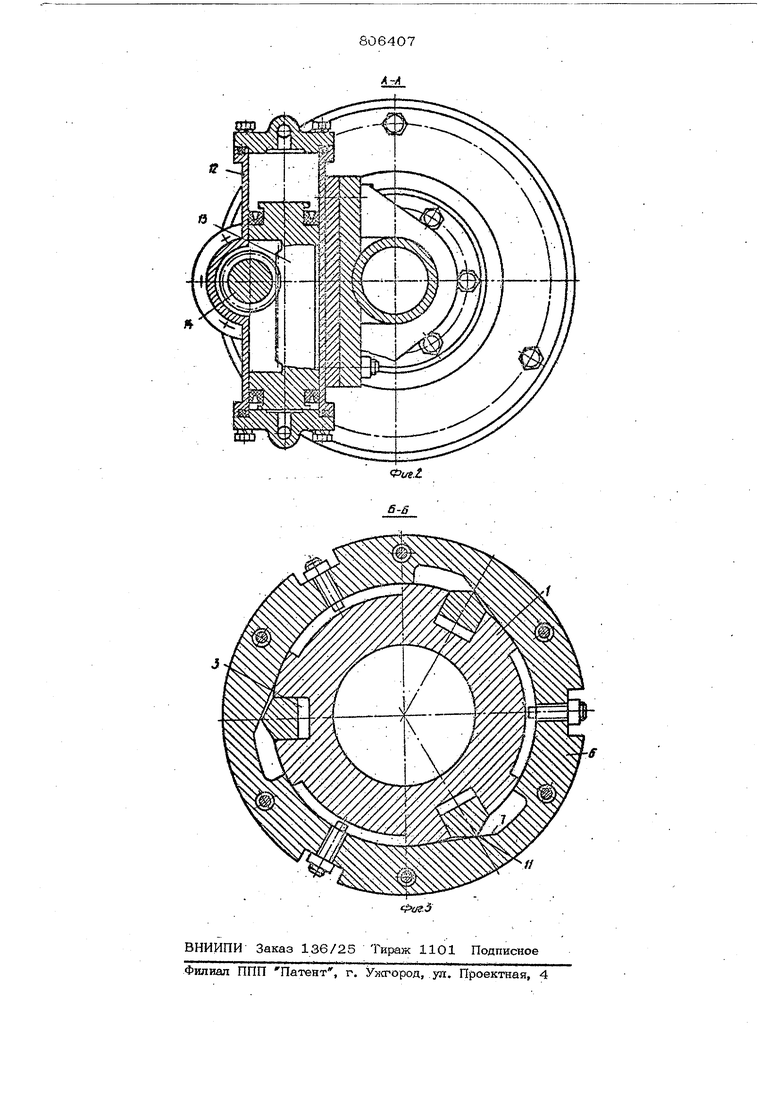
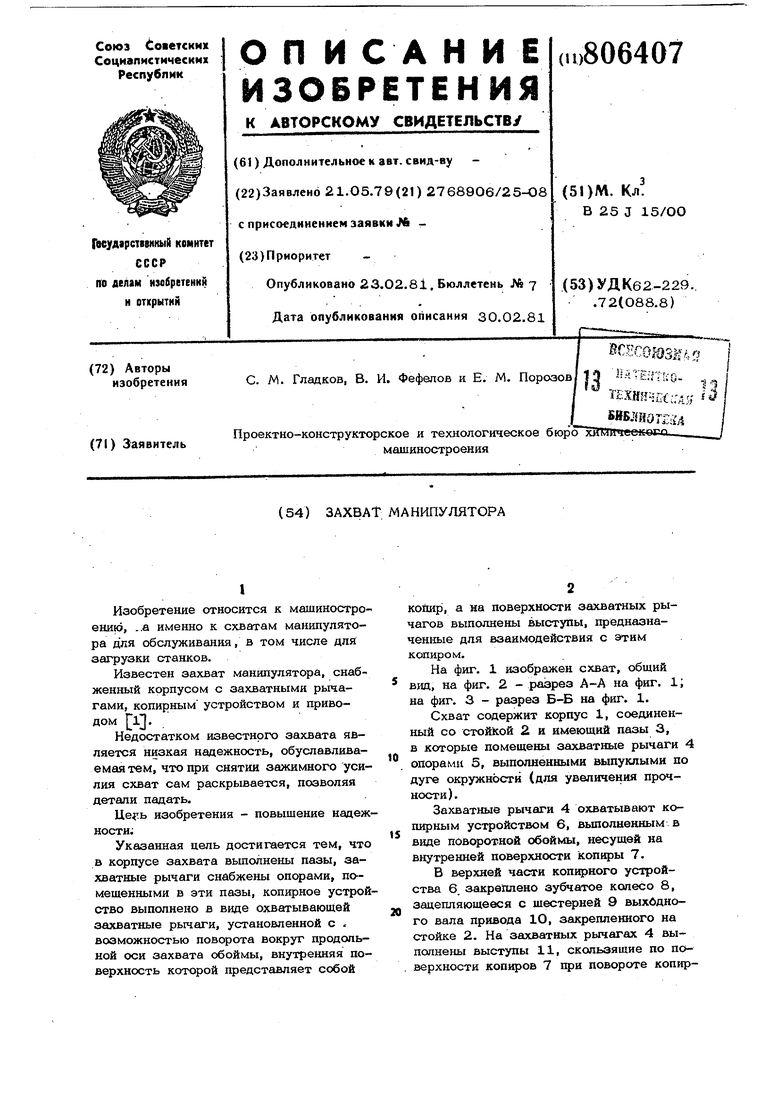
На фиг. 1 изображен схват, общий вид, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Схват содержит корпус 1, соединенный со СТОЙКОЙ 2 и имеющий пазы 3, в которые помещены захватные рычаги 4 опорами 5, выполненными выпуклыми по дуге окружности (для увеличения прочности).
Захватные рычаги 4 охватывают копирным устройством 6, вьшолненным в виде поворотной обоймы, несущей на внутренней поверхности копщзы 7.
В верхней части копщжого устройства 6. закреплено зубчатое колесо 8, зацепляющееся с шестерней 9 выхбдного вала привода 10, закрепленного на стойке 2. На 3 1хватных рычагах 4 выполнены выступы 11, скользящие по поверхности копиров 7 при повороте копирного устройства 6. Привод 10 включает силовой цилиндр 12, поршень которого Jвьшpлнeн в ввде рейки 13, зацепляющейся с шестерней 14, Количество захватных рычагов может быть любое. На чертеже показаны три захватныхрычага. Направление действия силового цилиндра перпе Еадикулярно напра лению действия массы захватываемой детали. Схват манипулятора работает следу ощим образом. Исходных полодсений для захватных ры чагов 4 может быть два в зависимости от того, за какую поверхность захватыва ется деталь. При захвате детали за наружную поверхность захватные рычаги 4 разведены При захвате детали за внутреннюю повер ность захватные рычаги 4 сведены. Стойка 2. опускается на захватываемую деталь. Приводом 10 зубчатое колесо 8, зацепляющееся с шестерней 9 выходного зала привода 10, поворачивает ся вокруг своей оси, увлекая за собой копирное устройство 6. При повороте копирного устройства 6 вокруг jcopnyca 1 копиры ,7 воздействуют на выступы 11 захватных рычагов 4, Принуждая их подвернуться опорами 5 в пазах 3 корпуса 1, вследствие чего захватываемая деталь ;зажимается. В случае аварийного от1слючешю питания силового цилиндра 12 поршень, выполненный в виде рейки 13, зацепляющейся с шестерней 14, не сможет переместиться от воздействия массы удерживаемой детали, тшс как сила трения кулачков 11 по копирам 7. увеличивается с увеличением массы захваченной детали. Формула изобретения Захват манипулятора, снабженный корпусом с захватными рычагами, копир - ным устройством и приводом, отличающийся тем, что, с цепью повышения надежности работы, в корпусе выполнены пазы, захватные рычаги снабжены опорами, помещенными в эти пазы, копирное устройство вьшолнено в виде охватывающей захватные рычаги и усталовленной с возможностью поворота вокруг продольной оси захвата обоймы, В1 утреш1яя поверхность которой представляет собой копир, а на поверхности захватных рычагов выполнены выступы, предназначен 1ые для взаимодействия с этим копиром. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 585964, кл. 2 В 25015/00, 1975.
Щ
ч. I
./

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Устройство для подачи детали в зону контроля после шлифования | 1990 |
|
SU1763142A1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
| Схват | 1987 |
|
SU1440704A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |