Изобретение относится к области робототехники и может быть использовано при изготовлении захватов роботов.
Наиболее близким по технической сущности к заявленному изобретению является захватное устройство, содержащее связанные с приводом рычаги, с которыми шарнирно соединены рычаги с губками, и контролирующее устройство (RU 2042503 C1, 27.08.95, B 25 J 15/00).
Недостатком данного известного устройства является наличие в нем камер с рабочей средой.
Технической задачей, на решение которой направлено заявленное изобретение, является упрощение конструкции и увеличение срока службы захватного устройства.
Для решения этой задачи известное захватное устройство, содержащее связанные с приводом рычаги, с которыми шарнирно соединены рычаги с губками, и контролирующее устройство снабжено пружинами, закрепленными одним концом на рычагах привода, а другим - на рычагах с губками, а контролирующее устройство выполнено в виде электрически связанного с приводом фоторезистора, смонтированного на одном из рычагов, соединенных с приводом, а также двух перегородок и накладки для создания затемненной области для фоторезистора, при этом одна из перегородок закреплена на рычаге с фоторезистором, а вторая перегородка и накладка - на соединенном с упомянутым рычагом рычаге с губкой.
Кроме того, захватное устройство снабжено стержнями, шарнирно установленными на рычагах, связанных с приводом, и электромагнитными зажимами для упомянутых стержней, шарнирно установленными на рычагах с губками и связанными с приводом.
Изобретение поясняется графическими материалами, где:
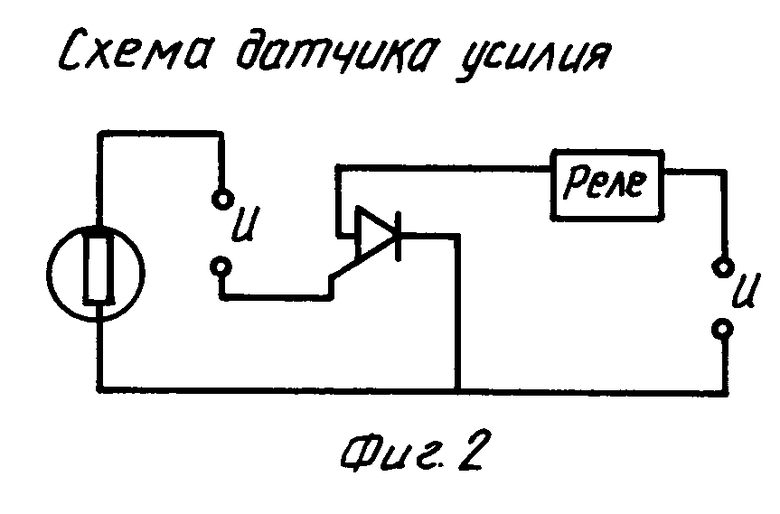
на фиг. 1 представлено захватное устройство;
на фиг. 2 - электрическая схема устройства.
Захватное устройство содержит связанные с приводом рычаги 1, с которыми шарнирно соединены рычаги 2 с губками 3. На каждом рычаге 1 закреплена одним концом пружина 4, соединенная другим концом с соответствующим рычагом 2. На рычагах 1 шарнирно установлены стержни 5, а на рычагах 2 шарнирно смонтированы электромагнитные зажимы 6, сквозь которые продеты стержни. Зажимы 6 связаны с приводом захватного устройства.
В захватном устройстве предусмотрено контролирующее устройство в виде электрически связанного с приводом фоторезистора 7, смонтированного на одном рычаге 1, а также двух перегородок 8 и 9 и накладки 10 для создания затемненной области для фоторезистора 7. Перегородка 8 и накладка 10 закреплены на рычаге 2, а перегородка 9 смонтирована на рычаге 1.
Устройство работает следующим образом.
При сжатии захватным устройством детали 11 в момент касания детали губками 2 возникает сила, действующая на деталь, и ответная реакция детали на эту силу. Губки 3 перестают перемещаться в пространстве, а рычаги 1 - продолжают. В результате этого перемещения рычаги 2 уподобляются рычагу, который действует на упругий элемент (пружину 4). В силу того, что упругость пружин 4 пропорциональна перемещению их свободного конца, сила, действующая на деталь 11, будет возрастать постепенно.
Фоторезистор 7, закрепленный на рычаге 1, в начальный момент находится в затемненной области, созданной перегородкой 9, перегородкой 8 и накладкой 10, жестко закрепленной на рычаге 2. Благодаря этому сопротивление фоторезистора максимально. При перемещении рычага 2 относительно рычага 1 под действием сил замкнутая область приоткрывается, освещая фоторезистор 7, вследствие чего уменьшается его сопротивление. К фоторезистору приложено напряжение U1.
Достигая некоторого максимального значения, ток вызывает резкое падение сопротивления на тринисторе и вследствие этого резкий скачок величины тока I2. В цепь, где течет ток I2, включено реле, которое выключает электродвигатель, приводящий в действие захват.
При перемещении захвата с деталью вследствие инертности детали могут возникнуть силы, действующие на пружины, и деталь может выскользнуть. Для предотвращения этого на рычагах 1 установлены стержни 5, имеющие возможность вращения вокруг закрепленного конца и пропущенные через электромагнитные зажимы 6, установленные на рычагах 2. Зажимы включаются одновременно с отключением привода захватного устройства. При включении его на разжим зажимы отключаются. Таким образом, сохраняется постоянной сила действия на деталь на протяжении всего времени перемещения захватного устройства.
Зная упругость пружины 4, а следовательно, и ту силу, с которой она будет действовать на рычаг 2 и деталь 11, можно, изменяя напряжение U1, изменять, а следовательно, и контролировать усилие сжатия детали захватным устройством.
Таким образом, данное изобретение позволяет контролировать усилие сжатия, развиваемое захватным устройством, при работе как с малыми, так и с большими тяжелыми объектами, легко перенастраивать его на нужное усилие, просто и быстро ремонтировать при выходе из строя некоторых частей, а также повысить срок службы захвата.
Устройство может быть изготовлено в серийном производстве на стандартном оборудовании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| УСТРОЙСТВО ДЛЯ РЕПОЗИЦИИ И ФИКСАЦИИ ПЕРЕЛОМОВ КОСТЕЙ ТАЗА | 2001 |
|
RU2204956C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1986 |
|
SU1495118A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| УСТРОЙСТВО ДЛЯ НАКОСТНОГО ОСТЕОСИНТЕЗА | 2000 |
|
RU2185121C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТ АВТОМАТИЧЕСКОГО ЗАХВАТЫВАНИЯ ПРЕДМЕТА | 1989 |
|
RU2018437C1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
Устройство может быть использовано в робототехнике. С приводом связаны рычаги, шарнирно соединенные с рычагами, несущими губки. На рычагах привода одним концом закреплены пружины, соединенные другим концом с рычагами с губками. На одном рычаге, связанном с приводом, установлен фоторезистор, электрически связанный с приводом, и смонтирована перегородка. На рычаге с губкой, связанном с упомянутым рычагом с фоторезистором, закреплены вторая перегородка и накладка. Перегородки и накладка предназначены для создания затемненной области для фоторезистора. На рычагах, связанных с приводом, шарнирно установлены стержни. Стержни связаны с электромагнитными зажимами, связанными с приводом, в результате обеспечивается упрощение конструкции и увеличение срока службы устройства. 1 з.п. ф-лы, 2 ил.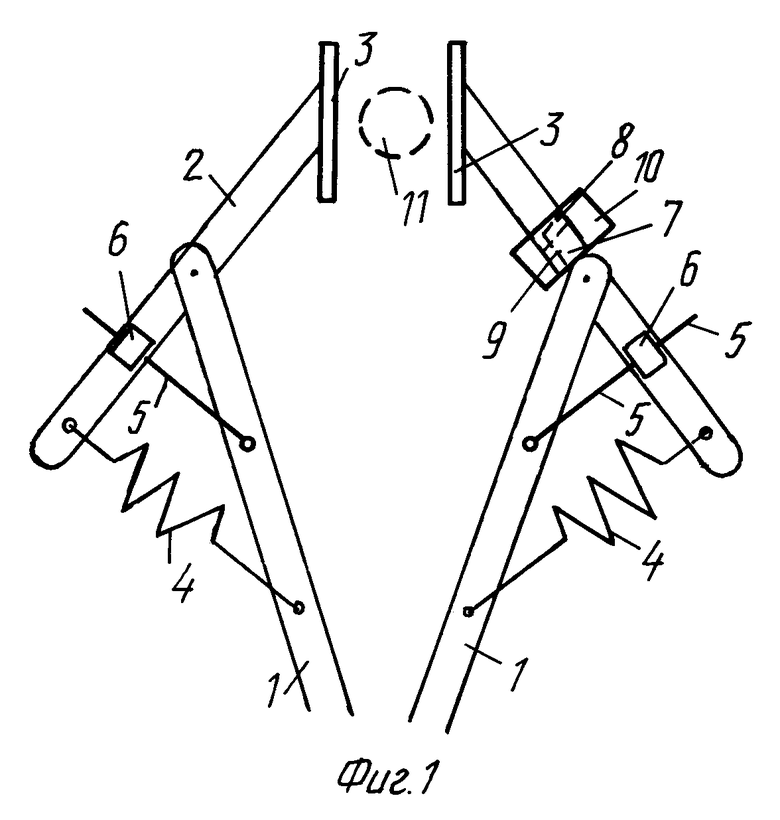
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| RU 2005062 C1, 30.12.93 | |||
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2024388C1 |
| Захват манипулятора | 1984 |
|
SU1373564A1 |
| US 4533167 A1, 06.08.85 | |||
| US 4696501 A, 29.09.87 | |||
| US 4600357 A, 15.07.86 | |||
| DE 3910801 A1, 18.10.90. | |||
