Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов и промышленньгх роботов, предназначенных для погру- эочно-разгрузочных и подъемно-транс- портньк работ, и может быть использовано при автоматизации технологических процессов.
Цель изобретения - повышение надежности захвата деталей различной формы.
На фиг.1 схематически изображен схват манипулятора в свободном сос
другой. При перемещении рычагов 1 и, 2 навстречу друг другу прижимные планки 6 входят в контакт с захватываемой деталью, при этом губки перенастраиваются по форме, поверхности детали и зажимают ее. Жескость пружин 13 и смещение осей шарниров, связывающих рычаги 1 и 2 с поводками 9 и 10, таковы, что обеспечивают сдвиг захватываемой детали к центру захватных рычагов 1 и 2, тем самым повышая надежность захватывания.
После осуществления захвата вклю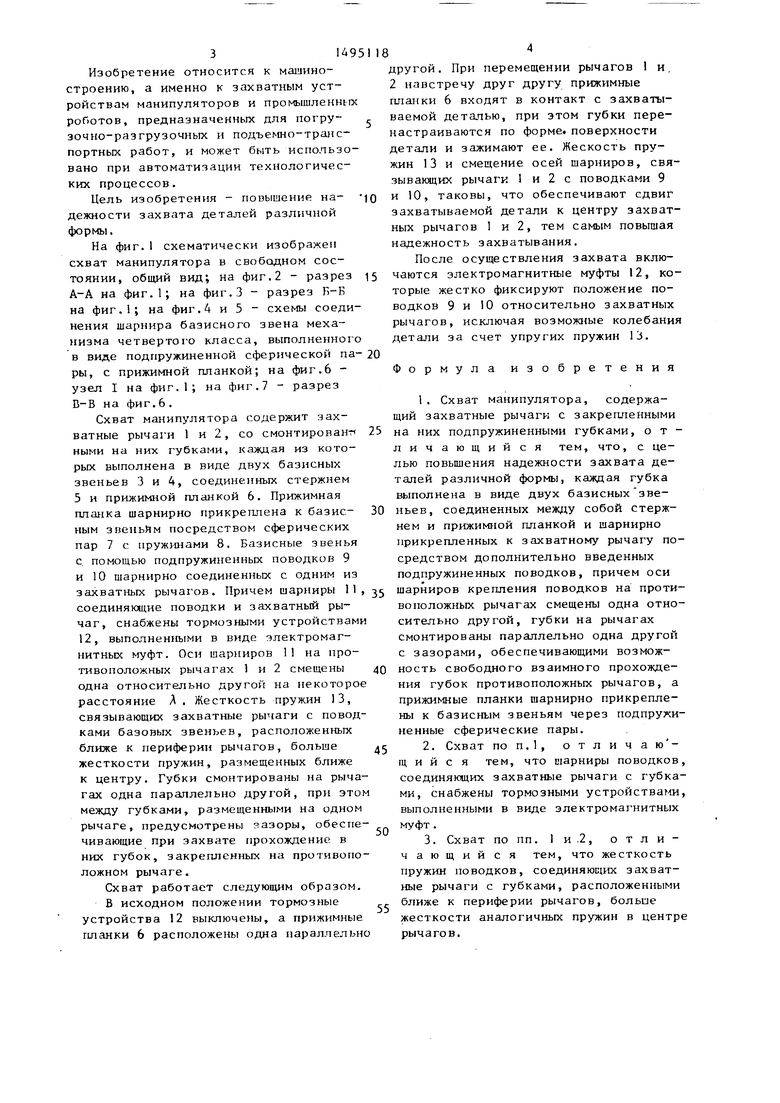
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1990 |
|
SU1771956A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват | 1980 |
|
SU1046085A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Схват манипулятора | 1987 |
|
SU1492495A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1983 |
|
SU1119842A1 |
Изобретение относится к захватным устройствам манипуляторов для погрузочно-разгрузочных и подъемно-транспортных работ и автоматизации технологических процессов. Цель изобретения - повышение надежности захвата деталей различной формы. Схват содержит захватные рычаги 1,2 с закрепленными на них губками, каждая из которых выполнена в виде двух базисных звеньев 3,4, соединенных стержнем 5 и планкой 6. Базисные звенья с помощью подпружиненных поводков 9 и 10 шарнирно соединены с захватными рычагами. Шарниры, соединяющие поводки и захватный рычаг, снабжены тормозными устройствами. В исходном положении они выключены, а губки параллельны друг другу. При захвате рычаги 1,2 сближаются, прижимные планки, контактируя с захватываемой деталью, перенастраиваются в соответствии с формой детали и зажимают ее. При этом жесткость пружин 13 и смещение осей шарниров, связывающих рычаги 1,2 с поводками 9,10, таковы, что обеспечивается сдвиг детали к центру рычагов 1,2. При включении тормозных устройств обеспечивается жесткая фиксация положения поводков 9,10 относительно захватных рычагов. 2 з.п. ф-лы, 7 ил.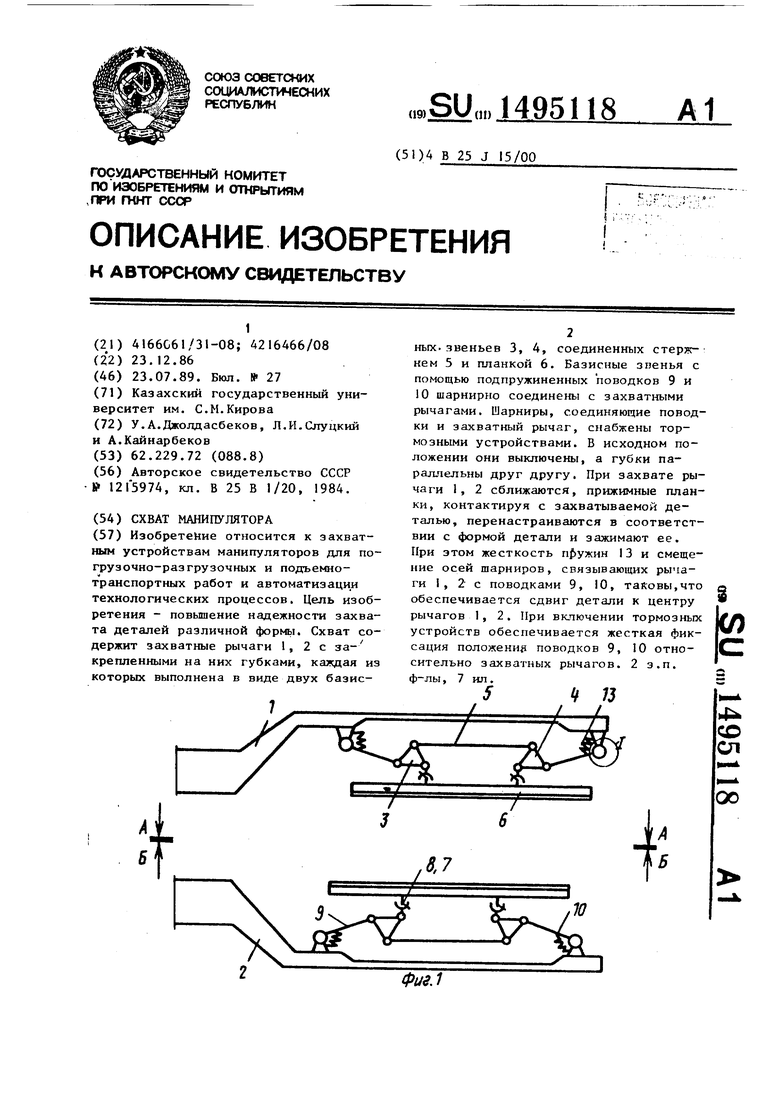
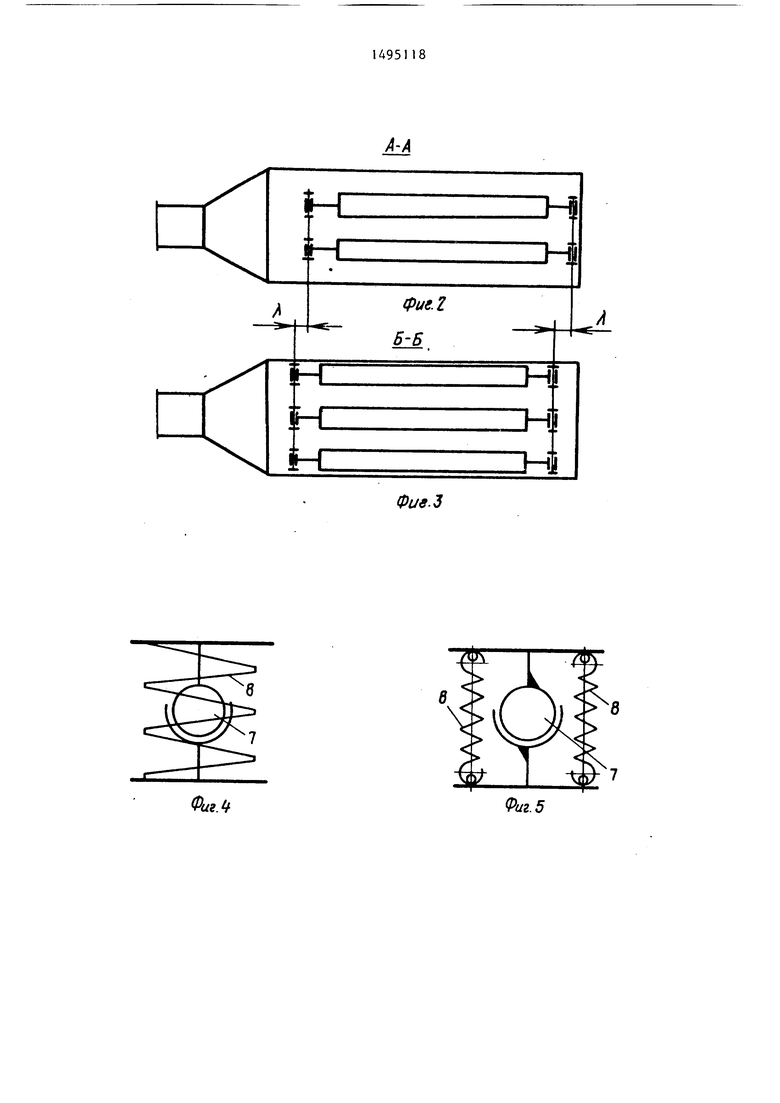
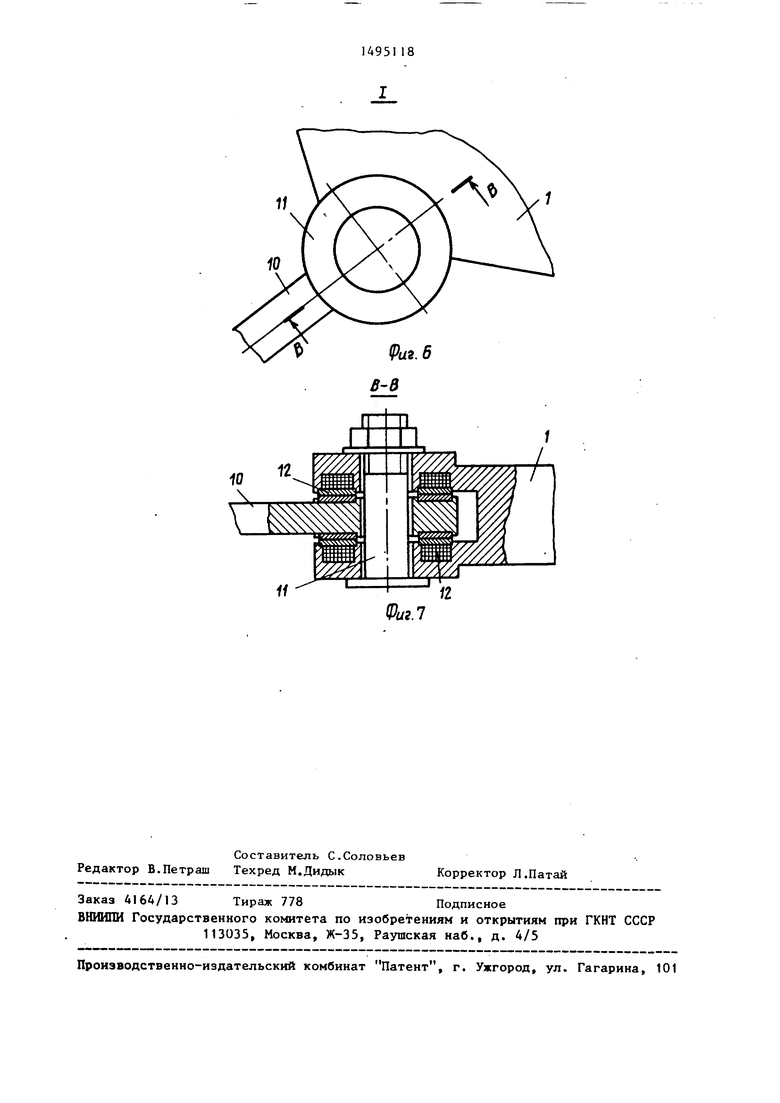
тоянии, общий вид; на фиг.2 - разрез 15 чаются электромагнитные муфты 12, коА-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 и 5 - схемы соединения шарнира базисного звена механизма четвертого класса, выполненного в виде подпружиненной сферической па- ры, с прижимной планкой; на фиг.6 - узел I на фиг.1; на фиг.7 - разрез В-В на фиг.6.
Схват манипулятора содержит захватные рычаги 1 и 2, со смонтированг 25 на них подпружиненными губками, о т ными на них губками, каждая из которых выполнена в виде двух базисных звеньев 3 и 4, соединенных стержнем 5 и прижимной планкой 6. Прижимная
планка шарнирно прикреплена к базис- 30 ньев, соединенных между собой стержным звеньйм посредством сферических пар 7 с пружинами 8. Базисные звенья с помощью подпружиненных поводков 9 и 10 шарнирно соединенных с одним из
нем и прижимной планкой и щарнирно прикрепленных к захватному рычагу посредством дополнительно введенных подпружиненных поводков, причем оси Зс1хватных рычагов. Причем шарниры 1 1 35 шарниров крепления поводков на проти- соединяющие поводки и захватный ры-воположных рычагах смещены одна отночаг, снабжены тормозными устройствами 12, выполненными в виде электромагнитных муфт. Оси шарниров 11 на противоположных рычагах 1 и 2 смещены 40 одна относительно другой на некоторое расстояние Д . Жесткость пружин 13, связывающих захватные рычаги с поводками базовых звеньев, расположенных ближе к периферии рычагов, большед
жесткости пружин, размещенных ближе к центру. Губки смонтированы на рычагах одна параллельно другой, при этом между губками, размещенными на одном рычаге, предусмотрены зазоры, обеспечивающие при захвате прохождение в них губок, закрепленных на противоположном рычаге.
Схват работает следующим образом. В исходном положении тормозныеближе к периферии рычагов, больше
устройства 12 выключены, а прижимныежесткости аналогичных пружин в центре
планки 6 расположены одна параллельно рычагов.
сительно другой, губки на рычагах смонтированы параллельно одна другой с зазорами, обеспечивающими возможность свободного взаимного прохождения губок противоположных рычагов, а прижимные планки шарнирно прикреплены к базисным звеньям через подпружиненные сферические пары.
отличаю50
щ и и с я тем, что шарниры поводков, соединяющих захватные рычаги с губками, снабжены тормозными устройствами, выполненными в виде электромагнитных муфт .
торые жестко фиксируют положение поводков 9 и 10 относительно захватных рычагов, исключая возможные колебания детали за счет упругих пружин 13.
Формула изобретения
личающийся тем, что, с целью повышения надежности захвата деталей различной формы, каждая губка выполнена в виде двух базисных звесительно другой, губки на рычагах смонтированы параллельно одна другой с зазорами, обеспечивающими возможность свободного взаимного прохождения губок противоположных рычагов, а прижимные планки шарнирно прикреплены к базисным звеньям через подпружиненные сферические пары.
отличаюближе к периферии рычагов, больше
0
щ и и с я тем, что шарниры поводков, соединяющих захватные рычаги с губками, снабжены тормозными устройствами, выполненными в виде электромагнитных муфт .
Фиг. If
фиг. г 5-6
JH
Н ЗН
Фив.З
в
1Л1.
(Риг.5
I
| Тиски | 1984 |
|
SU1215974A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
