Изобретение относится к машиностроению и может быть применено для управления различными механическими системами и агрегатами (рычажными редукторами, прессами, устройствами съема с валом подшипников, тормозными колодками и т. д.) и в других механических установках для передачи движений и редуцирования величины передаваемых усилий и перемещений их исполнительных органов.
Известно рычажное устройство для управления механизмами, например золотниками гидросистемы механической руки (А.С. СССР N 451071, МКИ G 05 G 1/04, БИ, 1974, N 43), содержащее двуплечий рычаг с рукояткой, соединенной с корпусом шаровым шарниром; в средней части этого рычага выполнена шаровая полость, образованная полусферическими выемками корпуса и крышки, а на концах - два взаимно перпендикулярных зуба, а рукоятка рычага изогнута таким образом, что ее конец совпадает с продольной осью двуплечего рычага.
Недостатки известного рычажного механизма - малые передаточные отношения при заданных габаритных ограничениях на конструкцию устройства механической руки, небольшие усилия на конце исполнительного плеча рычага, большие технологические трудности изготовления и наладки.
В качестве прототипа выбран рычажный механизм механических тяг (А.С. СССР N 637802, МКИ G 05 G 1/04, БИ, 1978, N 46), содержащий стержень со сквозным продольным пазом и рядом поперечных шлицев, расположенных с одной стороны стержня вдоль паза, шайбу со шлицами на одной из ее сторон и крепежный элемент, соединенный с шайбой и стержнем со стороны шлицев, а между шайбой и стержнем установлена промежуточная шайба с пазом и со шлицами с обеих сторон.
Недостатки известного рычажного механизма - сложность конструкции, необходимость и трудность подналадок, ограниченные технологические возможности, небольшие передаточные отношения механизма при его предельных заданных габаритах.
Заявляемое изобретение направлено на расширение технологических возможностей и областей использования рычажных механизмов для управления механическими системами в различных областях машиностроения.
Технический результат, который может быть получен при осуществлении изобретения: рычажный механизм имеет простую и высокотехнологичную конструкцию; при ограниченных габаритных объемах обеспечивает высокие передаточные отношения; при небольших усилиях и мощностях привода на входе обеспечивает большие выходные усилия.
Сущность предлагаемого изобретения заключается в том, что рычажный механизм для управления механическими системами, содержащий двуплечий рычаг большой длины с кратными длинами управляющего и исполнительного плеч, опирающийся на опору, расчленен на n более коротких двуплечих рычагов, каждый из которых имеет свою опору и которые последовательно соединены между собой осевыми или шаровыми шарнирами с числом m=(2n-2) звеньями связи с числом P= (n-1).
Между совокупностью существенных признаков, указанных в формуле изобретения, и техническими результатами при его реализации существуют следующие причинно-следственные связи.
В составе рычажного механизма из общего числа шарниров m=(2n-2) содержится хотя бы один шаровой шарнир, что позволяет конструктивно размещать управляющие и исполнительные плечи рычажного механизма в разных плоскостях. Если требуется иметь согласованное пространственное направление усилий на исполнительном и управляющем рычагах устройства, то число коротких двуплечих рычагов должно быть четным n= 2i, где i=1,2,... Если же требуется иметь встречное пространственное направление усилий на исполнительном и управляющем рычагах и к тому же обеспечить замкнутую реакцию опор на корпус механизма, то число коротких двуплечих рычагов должно быть нечетным.
Сопоставительный анализ предлагаемого устройства с прототипом позволяет сделать вывод о том, что заявляемый рычажный механизм для управления механическими системами содержит новые звенья и связи и удовлетворяет критерию "новизна".
На чертеже представлена кинематическая схема заявляемого рычажного механизма для управления механическими системами. В корпусе механизма 1 (его конструктив очерчен пунктиром) вместо одного длинного двуплечего рычага размещено пять коротких двуплечих рычагов 2, 3, 4, 5 и 6, каждый из которых закреплен соответственно на своей опоре 7, 8, 9, 10, 11. Короткие двуплечие рычаги имеют соответственно передаточные отношения K2, K3, K4, K5 и K6, определяемые соотношение длин исполнительного (выходного) и управляющего (входного) плеч соответствующих рычагов, так что общее передаточное отношение механизма будет равно произведению K0= K2•K3 •K4•K5•K6. Короткие двуплечие рычаги 2, 3, 4, 5, 6 последовательно соединены друг с другом звеньями связи (12, 13, 14, 15) с помощью осевых или шаровых шарниров 16, 17, 18, 19, 20, 21, 22 и 23. Шаровые шарниры (не более 1 - 2 в моноконструкции механизма) применяются только в случаях, когда управляющее плечо входного рычага 2 и исполнительное плечо 25 выходного рычага 6 располагаются в разных геометрических плоскостях.
Длины и количество коротких рычагов, их передаточные отношения, структура их компановки в корпусе механизма, с одной стороны, диктуются необходимостью получения заданного общего коэффициента передачи механизма K0, а с другой, ограничиваются объемными габаритами механизма. Хотя в рассматриваемом на чертеже примере число коротких рычагов в расчлененном длинном двуплечем рычаге принято равным 5, однако в общем случае оно может быть любым и равным n.
При конструировании рычажного механизма необходимо обеспечить соотношение перемещений управляющего плеча 24 входного рычага 2 (угол αу и линейное перемещение Hу) и исполнительного плеча 25 выходного рычага 6 (угол αи и линейное перемещение Hи). Из рассмотрения кинематических цепей видно, что при небольших длинах управляющего Lу и исполнительного Lи плеч эквивалентного многозвенного рычага 2, 3, 4, 5, 6 на выходе последнего можно получить весьма большие исполнительные усилия Qи при небольших управляющих усилиях Qу, поскольку Oи=K0•Qу.
К концу управляющего плеча 24 рычажного механизма жестко присоединяется исполнительный механизм привода (электрического, электромагнитного, пневматического, ручного и т.п.), а к концу исполнительного плеча 25 механизма - исполнительный орган производственного агрегата или установки (пресса, тормозного устройства, съемника и т.п.).
Использование предлагаемого рычажного механизма для управления механическими системами позволяет обеспечивать при ограниченных объемных габаритах механизма весьма большие выходные усилия при небольших усилиях и мощностях привода на входе механизма высокие передаточные отношения механизма, простую и высокотехнологичную конструкцию передаточного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ПЛАТФОРМА | 1998 |
|
RU2141420C1 |
| СПОСОБ УСТАНОВКИ ЗАГОТОВКИ НА ЦЕНТРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168395C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВРАЩЕНИЯ ВАЛА | 2001 |
|
RU2203776C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ НА УСТАЛОСТЬ ОБРАЗЦОВ | 1992 |
|
RU2044297C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1992 |
|
RU2046618C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2157897C2 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ | 1995 |
|
RU2115844C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| ВАКУУМ-ЛОВИТЕЛЬ КОНВЕЙЕРНОЙ ЛЕНТЫ | 1999 |
|
RU2167095C2 |
Изобретение относится к машиностроению и может быть применено в различных механических системах и агрегатах. Технический результат - изобретение позволяет обеспечить при ограниченных габаритных размерах механизма весьма большие выходные усилия при небольших усилиях и мощностях привода на входе механизма, высокие передаточные отношения механизма, его простую и высокотехнологичную конструкцию. С этой целью двуплечий рычаг с кратными длинами управляющего и исполнительного плеч, опирающийся на опору, расчленен на n более коротких двуплечих рычагов, каждый из которых имеет свою опору и которые последовательно соединены между собой через осевые и шаровые опоры (шарниры) с числом m=(2n-2) звеньями связи с числом Р=(n-1). 2 з.п. ф-лы, 1 ил.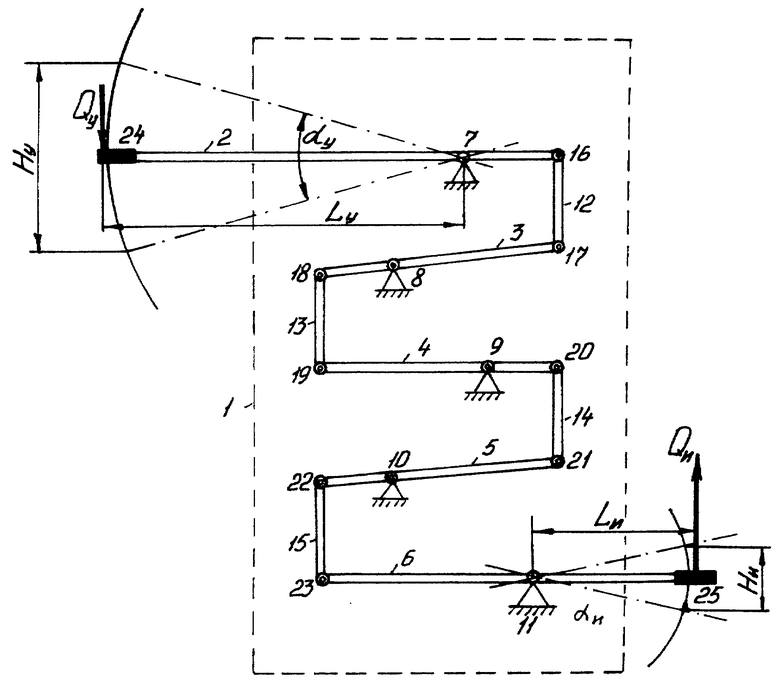
| Рычаг с регулируемой длиной для механических тяг | 1977 |
|
SU637802A1 |
| Устройство для управления двумя золотниками | 1973 |
|
SU451071A1 |
| Рукоятка управления манипулятором | 1973 |
|
SU446413A1 |
| Устройство для управления золотниками гидрораспределителя | 1984 |
|
SU1196833A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
