Изобретение относится к области бурения наклонно направленных и горизонтальных скважин и может быть использовано при наведении ствола скважины в проектную точку продуктивного пласта по азимуту из вертикального положения буровой колонны.
Известен способ контроля азимута отклонителя в процессе бурения (патент 2091577, Е21В 47/022, публ. БИ 27-97), заключающийся в измерении составляющих магнитного поля Земли в виде отношения двух напряжений с феррозондов.
Недостатком известного способа является невозможность его применения при кустовом бурении скважин на суше и бурении морских скважин с одной платформы, где расстояние между стволами в верхнем участке 5-7 метров. Такой способ наведения может стать причиной повреждений соседних работающих скважин, так как магнитное поле в зоне измерений искажено. Кроме того, этот способ не может быть применен при разбуривании горизонтальных стволов из фонда старых обсаженных вертикальных скважин, в которых феррозонды не работают.
Известен способ измерения параметров искривления скважины (заявка на изобретение 95103371, Е 21 В 47/02, публ. БИ 2-97), взятый в качестве прототипа, заключающийся в измерении зенитного угла, азимута и положения отклонителя, в установке над отклонителем диамагнитной трубы, в которую устанавливают и фиксируют относительно отклонителя магнитометрический инклинометр с фиксированными относительно корпуса датчиками зенитного угла и азимута, а их ориентирование в плоскости искривления скважины осуществляют с устья скважины путем поворота буровой колонны и контролируют по показаниям датчика положение отклонителя.
Недостатком известного способа является необходимость установки диамагнитной трубы длиной от 3-х до 25 метров (в зависимости от широты места) над отклонителем и невозможность наведения буровой колонны на месторождение из вертикального положения по азимуту, так как угол отклонителя определяют по формуле
где ах, ау - проекции ускорения силы тяжести на оси инклинометра, перпендикулярные продольной оси. При вертикальном положении буровой колонны величины проекций ускорений ах, ау близки к нулю, и величина угла отклонителя становится неопределенной. Это приводит к тому, что начальный участок траектории скважины по азимуту при переходе от вертикального участка к наклонному бурят со случайным первоначальным азимутом до тех пор, пока величина зенитного угла не достигнет величин, при которых азимут наклона ствола скважины будет определен однозначно (практически 3-5 градусов), после чего и производят поворот буровой колонны на заданный азимут.
Задача изобретения - повышение точности наведения буровой колонны на месторождение по азимуту из вертикального положения.
Поставленная задача решается тем, что в способе наведения буровой колонны на месторождение по азимуту, включающем фиксацию корпуса инклинометра относительно отклонителя и поворот колонны бурильных труб с устья скважины, определяют азимут Ам географический с устья скважины на месторождение, угол α между плоскостью действия отклонителя и измерительной осью инклинометра, а поворот бурильной колонны осуществляют до тех пор, пока азимут AZT текущий измерительной оси инклинометра будет равен Aм-α, если плоскость действия отклонителя расположена справа от измерительной оси инклинометра или Aм+α, если плоскость действия отклонителя расположена слева от измерительной оси инклинометра, при этом азимут AZT текущий в процессе поворота определяют по формуле
где ωx, ωу - проекции горизонтальной составляющей вращения Земли на оси инклинометра, перпендикулярные продольной оси.
Наличие указанных признаков позволяет сделать вывод о новизне технического решения.
Сравнение заявленного решения с другими техническими решениями в данной области техники не позволило выявить совокупность признаков, отличающих заявленное решение от прототипа, что позволяет сделать вывод о соответствии технического решения критерию "изобретательский уровень".
Таким образок, заявленное техническое решение является новым, имеет изобретательский уровень, промышленно применимо.
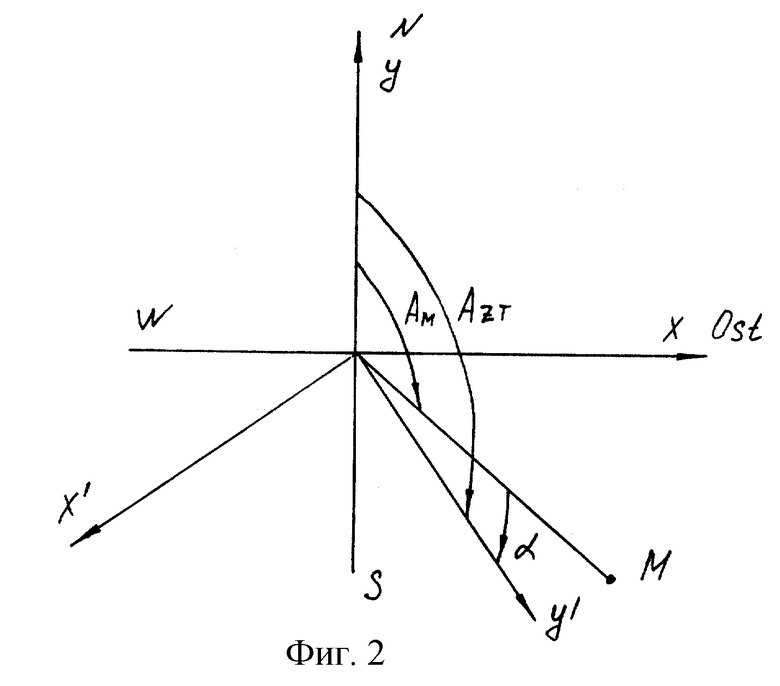
Сущность предложенного изобретения поясняется чертежом, где на фигуре 1 показано исходное положение буровой колонны в географической системе координат (вид сверху). На фигуре 2 показан результат поворота буровой колонны вокруг своей оси до тех пор, пока плоскость действия отклонителя совпадет с азимутом точки на месторождении.
Измерительная ось инклинометра Y (фиг.1) направлена на Север, ось Х - на Восток, а продольная ось инклинометра Z - вниз. В точке М условно показано месторождение. Угол α - угол между осью Y инклинометра и плоскостью действия отклонителя. X' и Y' - положение измерительных осей инклинометра после поворота буровой колонны. Ам -азимут географический с устья скважины на месторождение, AZT - азимут текущий, определяемый в процессе поворота буровой колонны (фиг.2).
Реализация способа производится в следующей последовательности. Первоначально определяют азимут географический с устья скважины на точку в контуре разрабатываемого месторождения (если не задан проектный азимут). Азимут географический может быть определен, например, азимутом прямой, соединяющей устье скважины с точкой месторождения на географической карте.
Угол α между плоскостью действия отклонителя и измерительной осью инклинометра считывают с отсчетной шкалы, нанесенной на корпус инклинометра. Нулевым отсчетом является риска положения измерительной оси Y инклинометра, оцифровка отрицательных углов идет влево от нуля, а положительных - вправо от нуля.
Угол α перед решением задачи вводят в вычислитель с пульта. Азимут текущий положения измерительной оси инклинометра определяют в вычислителе по формуле
где ωx, ωу - проекции горизонтальной составляющей вращения Земли на оси инклинометра, перпендикулярные продольной оси.
Проекции горизонтальной составляющей получают в виде
ωx = ωхи-Δωx,
ωу = ωуи-Δωу,
где ωхи, ωуи - измеренные составляющие угловых скоростей с выхода датчиков угловых скоростей по соответствующий осям.
Δωх, Δωу инструментальные систематические погрешности определения скоростей уходов, которые определяют по формулам
Δωx=n0+n1ax+n2ay+n3az+n4axay+n5axaz+n6ayaz+ n7axayaz
Δωу=m0+m1ax+m2ay+m3az+m4axay+m5axaz+ m6ayaz+m7axayaz
где n0-n7, m0-m7 - постоянные коэффициенты для данного инклинометра, определяемые при калибровке.
Для реализации предложенного способа может быть использован, например, гироскопический инклинометр ИГМ-73-120/60.
Предложенный способ наведения буровой колонны на месторождение по азимуту позволяет исключить из траектории скважины участки с резким изменением азимута угла наклона скважины при переходе от вертикальных участков к наклонным, сократить затраты на бурение скважин, обеспечить безопасную работу соседних скважин при кустовом бурении, бурении морских скважин с одного основания, а также производить разбуривание горизонтальных стволов из фонда старых обсаженных вертикальных скважин.
Способ проверен на стенде предприятия. Погрешность наведения в любой точке не превышает 2,0 градуса, время наведения не более 3-х минут (длительность переходного процесса в датчиках угловой скорости).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ АЗИМУТА УГЛА УСТАНОВКИ ОТКЛОНИТЕЛЯ В ВЕРТИКАЛЬНЫХ СТВОЛАХ СКВАЖИН | 2009 |
|
RU2434132C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ОТКЛОНИТЕЛЯ В НАКЛОННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИНАХ | 1991 |
|
RU2030576C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| Способ ориентирования отклонителя в процессе бурения | 1974 |
|
SU562644A1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ ЗАБУРИВАНИИ НАКЛОННЫХ УЧАСТКОВ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078921C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| СПОСОБ СТРОИТЕЛЬСТВА И ЭКСПЛУАТАЦИИ МНОГОЗАБОЙНОЙ СКВАЖИНЫ | 1999 |
|
RU2208119C2 |
Изобретение относится к области бурения наклонно направленных и горизонтальных скважин и может быть использовано при наведении ствола скважины в проектною точку продуктивного пласта по азимуту из вертикального положения буровой колонны. Задача изобретения - повышение точности наведения буровой колонны на месторождение по азимуту из вертикального положения. Для этого фиксируют корпус инклинометра относительно отклонителя и поворачивают колонну бурильных труб с устья скважины. Затем определяют геофизический азимут Ам с устья скважины на месторождение и угла α между плоскостью действия отклонителя и измерительной осью инклинометра. Поворот бурильной колонны осуществляют до тех пор, пока текущий азимут AZT измерительной оси инклинометра будет равен Aм-α, если плоскость действия отклонителя расположена справа от измерительной оси инклинометра, или Aм+α, если плоскость действия отклонителя расположена слева от измерительной оси инклинометра. При этом текущий азимут в процессе поворота определяют по формуле  где Wx, Wy - проекции горизонтальной составляющей вращения Земли на оси инклинометра, перпендикулярные продольной оси. 2 ил.
где Wx, Wy - проекции горизонтальной составляющей вращения Земли на оси инклинометра, перпендикулярные продольной оси. 2 ил.
Способ наведения буровой колонны на месторождение по азимуту, включающий фиксацию корпуса инклинометра относительно отклонителя и поворот колонны бурильных труб с устья скважины, отличающийся тем, что определяют азимут Ам географический с устья скважины на месторождение, угол α между плоскостью действия отклонителя и измерительной осью инклинометра, а поворот бурильной колонны осуществляют до тех пор, пока Аzт азимут текущий измерительной оси инклинометра будет равен Aм-α, если плоскость действия отклонителя расположена справа от измерительной оси инклинометра, или Aм+α, если плоскость действия отклонителя расположена слева от измерительной оси инклинометра, при этом азимут текущий в процессе поворота определяют по формуле
где Wx, Wy - проекции горизонтальной составляющей вращения Земли на оси инклинометра, перпендикулярные продольной оси.
| RU 95103371 А1, 20.01.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТОВ СКВАЖИН | 0 |
|
SU258992A1 |
| Способ определения азимута | 1985 |
|
SU1388551A1 |
| Способ определения азимута искривления траектории скважины | 1986 |
|
SU1467162A1 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| Способ определения координат исполнительного органа буровой установки при проходке стволов | 1990 |
|
SU1768752A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АЗИМУТА ОТКЛОНИТЕЛЯ В ПРОЦЕССЕ БУРЕНИЯ | 1994 |
|
RU2091577C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ СКВАЖИНЫ (ВАРИАНТЫ) | 1994 |
|
RU2109943C1 |
| US 3935642 А, 03.02.1976 | |||
| US 4072200 А, 07.02.1978 | |||
| DE 4016437 С2, 08.08.1991 | |||
| СПОСОБ ПОЛИРОВАНИЯ ПОВЕРХНОСТЕЙ | 2001 |
|
RU2207240C2 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| КАТАЛИЗАТОР ДЛЯ ГИДРОПЕРЕАЛКИЛИРОВАНИЯ, | 0 |
|
SU384537A1 |
