Изобретение относится к военной технике, а именно к системам управляемого оружия и ракетной технике с головками самонаведения (ГСН), и может быть использовано в артиллерийских управляемых снарядах с ГСН.
Известен способ взведения бортовых систем управляемого снаряда, выбранный за прототип, заключающийся в том, что при старте ракеты под действием ствольной перегрузки запускают часовой механизм системы управления ракетой, по истечении времени, установленного в часовом механизме, разарретируют гироскоп инерциальный и взводят батарею питания бортовой аппаратуры, взводят батареи питания ГСН, при выходе на режим одной из батарей питания ГСН отстреливают блок носовой, открывая входной зрачок ГСН, Российская Федерация, патент 2191984, зарегистрирован 27 октября 2002 г., МПК 7 F42В 15/01 [1].
Данный способ реализован с помощью устройства взведения бортовых систем управляемого снаряда, выбранного за прототип, содержащего часовой механизм, головку самонаведения, гироскоп инерциальный, блок питания, состоящий из батареи питания бортовой аппаратуры и батарей питания ГСН, блок носовой, схему "И", схему "ИЛИ, рулевой привод (РП) и формирователь сигналов управления рулевым приводом, состоящий из усилителей мощностей, которые формируют управляющий ток из сигналов управления, выдаваемых ГСН по каждому из вертикальных и горизонтальных каналов управления, причем выход часового механизма соединен со входом взведения гироскопа инерциального и входом взведения батареи питания бортовой аппаратуры блока питания, вход рулевого привода соединен с выходом формирователя сигналов управления рулевым приводом, вход блока носового соединен с выходом одной из батарей питания ГСН блока питания, первый вход схемы "И" соединен с выходом гироскопа инерциального, а второй вход - со вторым выходом ГСН, выход схемы "И" соединен со вторым входом схемы "ИЛИ", первый вход которой соединен с третьим выходом ГСН, а выход - со входом одного из усилителей мощности формирователя сигналов управления рулевых приводов [1].
Недостатком данных способа и устройства является то, что в случае некорректного выхода на режим работы ГСН полет управляемой ракеты на конечном участке траектории произойдет без самонаведения, в результате чего точка падения будет слабо предсказуема. Такая ситуация приведет к повышенной опасности управляемой ракеты при ее отработке, так как управляемая ракета может выйти из зоны разрешенных работ при испытаниях ракет, а также поражению своих объектов в боевых условиях.
Задачей предлагаемой группы изобретений является предотвращение указанной аварийной ситуации, повышение безопасности при использовании управляемых ракет.
Поставленная задача достигается тем, что в способе взведения бортовых систем управляемой ракеты, заключающемся в том, что при старте ракеты запускают часовой механизм системы управления ракетой, взводят батарею питания бортовой аппаратуры, разарретируют гироскоп инерциальный, по истечении установленного в часовом механизме времени t1 взводят батареи питания головки самонаведения (ГСН), при выходе на режим одной из батарей питания ГСН отстреливают блок носовой, открывая входной зрачок ГСН, в нем по истечении установленного в часовом механизме времени t2 регистрируют параметры ГСН, сравнивают их с заданными значениями, при отрицательном результате сравнения регистрируемых параметров на рулях рулевого привода формируют управляющий сигнал снижения по вертикальной координате канала управления рулевого привода, чем обеспечивают экстренное приведение управляемой ракеты к поверхности земли, причем время t2 устанавливают как время, достаточное для приведения ГСН в рабочее состояние и выхода ее параметров на заданный режим после взведения батарей питания ГСН, но меньшее времени ожидаемого захвата цели; в управляемую ракету, включающую часовой механизм, головку самонаведения, гироскоп инерциальный, блок питания, содержащий батарею питания бортовой аппаратуры и батареи питания ГСН, блок носовой, схему "И", формирователь сигналов управления рулевым приводом и рулевой привод, причем первый выход часового механизма соединен со входом взведения гироскопа инерциального и входом взведения батареи питания бортовой аппаратуры блока питания, а второй выход - со входом взведения батарей питания ГСН блока питания, с выходом одной из которых соединен вход блока носового, вход рулевого привода соединен с выходом формирователя сигналов управления рулевым приводом, дополнительно введены блок контроля параметров, первый и второй коммутаторы и формирователь команды снижения, причем вход блока контроля параметров соединен с первым выходом ГСН, а выход - с первым входом схемы "И", второй вход которой соединен с третьим выходом часового механизма, первый вход первого коммутатора соединен с выходом гироскопа инерциального, второй вход первого коммутатора - с третьим выходом ГСН, третий вход первого коммутатора - со вторым выходом («Захват») ГСН, а выход первого коммутатора соединен с первым входом второго коммутатора, второй вход которого соединен с выходом формирователя команды снижения, третий вход второго коммутатора соединен с выходом схемы "И", выход второго коммутатора соединен со входом формирователя сигналов управления приводом.
Положительный эффект обеспечивается за счет того, что в способе взведения бортовых систем управляемой ракеты и устройстве для его осуществления в момент времени t2, которое больше времени взведения батареи питания ГСН t1, но меньше времени ожидаемого захвата цели t3, реализуют автоматический контроль готовности ГСН к функционированию посредством регистрации и сравнения с заданными значениями ее параметров. На этом этапе при штатном режиме функционирования бортовых систем управления взведены и вышли на режим батареи блока питания, ГСН приведена в рабочее состояние и ее параметры, если ГСН функционирует нормально, соответствуют заданным значениям. После захвата цели ГСН выдает сигналы управления в каналы управления РП, поэтому в случае отказа ГСН будут сформированы некорректные сигналы управления и дальнейший полет управляемой ракеты может привести к аварийной ситуации. Для повышения безопасности запусков управляемых ракет по истечении установленного в часовом механизме времени t2 регистрируют параметры ГСН, сравнивают их с заданными значениями. При отрицательном результате контроля для прекращения неуправляемого полета ракеты формируют управляющий сигнал снижения по вертикальной координате канала управления РП, чем обеспечивают экстренное приведение управляемой ракеты к поверхности земли. Для реализации перечисленных операций в управляемую ракету дополнительно введены блок контроля параметров, первый и второй коммутаторы и формирователь команды снижения.
Данное техническое решение поясняется графическими материалами.
На фиг.1 приведена блок-схема управляемой ракеты, в которой реализуют предлагаемый способ.
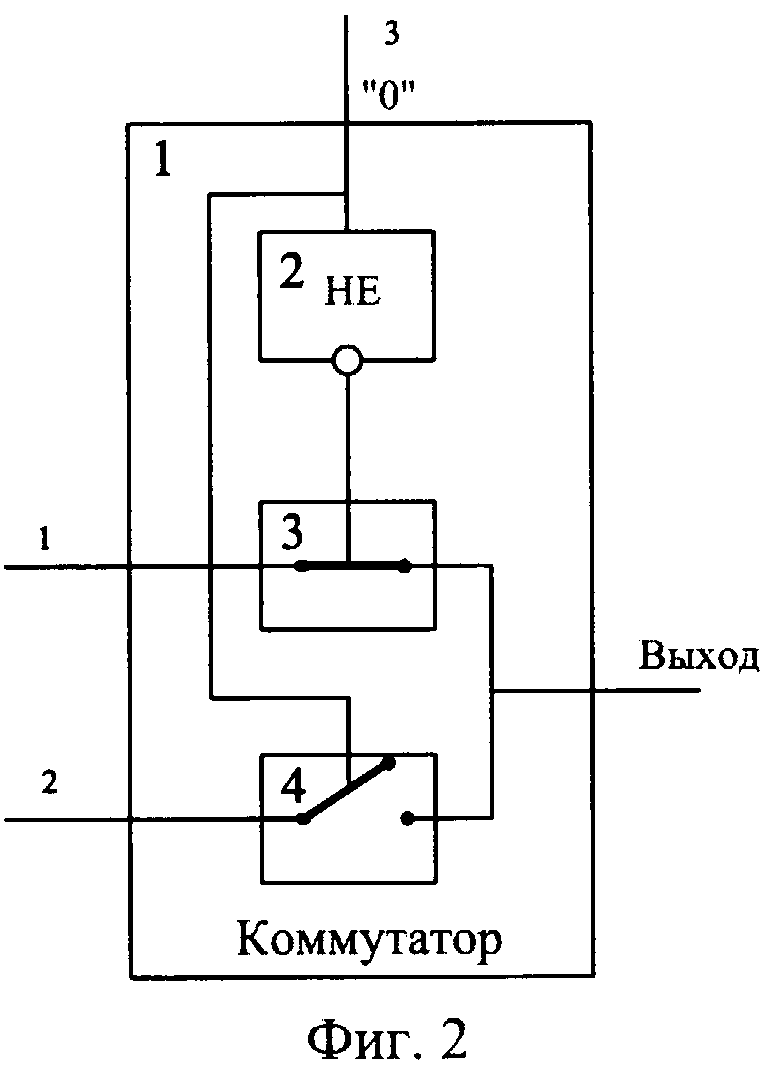
На фиг.2 приведен пример схемного выполнения коммутатора.
Блок-схема управляемой ракеты включает в себя:
1 - часовой механизм (ЧМ);
2 - ГСН;
3 - гироскоп инерциальный (ГИ);
4 - блок питания (БП);
5 - блок носовой (БН);
6 - блок контроля параметров (БКП);
7 - схема "И";
8 - первый коммутатор;
9 - формирователь команды снижения;
10 - второй коммутатор;
11 - формирователь сигналов управления приводом;
12 - рулевой привод (РП).
Работает устройство следующим образом.
При старте управляемой ракеты, например, под действием стартовой перегрузки запускается часовой механизм (1), в котором предварительно установлены времена: t0 - время старта, t1 - время взведения батарей питания ГСН блока питания (4), t2 - время, достаточное для приведения ГСН в рабочее состояние и выхода ее параметров на заданный режим после взведения ее батарей питания, но меньшее времени ожидаемого захвата цели.
В момент времени t0 часовой механизм (1) формирует импульс высокого уровня, который с его первого выхода поступает на электровоспламенители гироскопа инерциального (3) и батареи питания бортовой аппаратуры блока питания (4). При этом разарретируется гироскоп инерциальный (3) и выходит на режим батарея питания бортовой аппаратуры, с выхода которой поступает напряжение на электронные блоки бортовой аппаратуры управляемой ракеты и на РП (12), электронные блоки устанавливаются в исходное состояние.
В исходном состоянии на втором и третьем выходах часового механизма (1) присутствуют сигналы низкого уровня, на втором входе схемы "И" (7), соединенном с третьим выходом часового механизма (1), действует низкий уровень, поэтому с выхода схемы "И" (7) низкий уровень поступает на третий управляющий вход второго коммутатора (10), при этом выход второго коммутатора (10) скоммутирован с его первым входом, обеспечивая управление РП (12) по сигналам управления с гироскопа инерциального (3) при низком уровне сигнала с выхода 2 («Захват») ГСН до захвата цели или с ГСН (2) при высоком уровне сигнала с выхода 2 («Захват») ГСН после захвата цели.
Сигнал управления с выхода гироскопа инерциального (3) поступает на первый вход первого коммутатора (8), на втором входе которого действует сигнал управления с третьего выхода ГСН (2). На третьем входе первого коммутатора (8) действует управляющий коммутатором сигнал со второго выхода («Захват») ГСН (2), низкий уровень которого до захвата цели коммутирует выход первого коммутатора (8) с его первым входом и разрешает прохождение сигналов управления с выхода гироскопа инерциального (3) через блок (8) на первый вход второго коммутатора (10) и с его выхода на вход формирователя сигналов управления приводом (11), а с его выхода на вход РП (12).
В момент времени t1 часовой механизм (1) на втором выходе формирует импульс высокого уровня, который поступает на электровоспламенители батарей ГСН блока питания (4). Эти батареи выходят на режим и под действием напряжения одной из батарей ГСН взводится электровоспламенитель блока носового (5) и последний отстреливается, открывая входной зрачок ГСН (2) для приема входных сигналов, отраженных от цели. При выходе батарей ГСН на рабочий режим с первого выхода ГСН (2) сигналы, определяющие ее параметры, поступают на вход блока контроля параметров (6), в котором происходит их сравнение с заданными значениями. При соответствии параметров ГСН требуемым на выходе блока контроля параметров (6) формируется низкий уровень напряжения, который поступает на первый вход схемы "И" (7). При отказе ГСН (2) на выходе блока контроля параметров (6) формируется высокий уровень напряжения.
В момент времени t2 часовой механизм (1) на третьем выходе формирует импульс высокого уровня, который поступает на второй вход схемы "И" (7). Если в данный момент и на первом входе схемы "И" (7) действует высокий уровень, т.е. произошел отказ ГСН, высокий уровень напряжения с выхода схемы "И" (7) поступает на третий управляющий вход второго коммутатора (10) и переключает его, соединяя выход формирователя команды снижения (9) с формирователем сигналов управления приводом (11). РП (12), отрабатывая поступившую с выхода формирователя сигналов управления приводом (11) на его вход команду снижения, обеспечивает экстренное приведение управляемой ракеты к поверхности земли.
При захвате цели на выходе 2 («Захват») ГСН (2) формируется высокий уровень, поступающий на вход 3 первого коммутатора (8) и коммутирующий его выход со входом 2, чем обеспечивается управление РП управляющими сигналами с выхода 3 (канал управления) ГСН (2).
Блоки 1, 2, 3, 4, 5, 7, 11, 12 могут быть выполнены, например, аналогично прототипу [1]. В частности, формирователь сигналов управления рулевым приводом (11) может быть выполнен, например, аналогично прототипу [1] на усилителях мощности, которые формируют управляющий ток для рулей РП из сигналов управления, выдаваемых ГСН.
Формирователь команды снижения (9) может быть выполнен, например, как источник постоянного напряжения на микросхеме 142ЕН5А со стабилизированным выходным напряжением +5 В. Блок контроля параметров (6) представляет собой в общем виде контроллер и может быть выполнен, например, на однокристальной микроЭВМ 1830ВЕ51.
Коммутаторы (8), (10) - двухполюсные. Пример схемного выполнения такого коммутатора приведен на фиг.2. Коммутатор (1) реализован на инверторе (2), например на одном из элементов МС 164ЛН1, и двух однополюсных коммутаторах (3) и (4), например на элементах МС К176КТ1. Входы 1 и 2 коммутатора (1) являются входами однополюсных коммутаторов (3) и (4), выходы которых объединены и образуют выход коммутатора (1).
Чтобы выход коммутатора (1) был замкнут со входом 1 и разомкнут со входом 2 по низкому уровню ("0") на управляющем входе 3, разомкнут со входом 1 и замкнут со входом 2 по высокому уровню ("1") на управляющем входе 3, вход 3 коммутатора (1) соединен со входом разрешения прохождения сигналов коммутатора 4 и входом инвертора (2), выход которого соединен со входом разрешения прохождения сигналов коммутатора (3).
Таким образом, предложенные способ взведения бортовых систем управляемой ракеты и устройство для его осуществления автоматизируют контроль параметров ГСН и ее готовность к функционированию, позволяют прекратить неуправляемый полет ракеты в случае отказа ГСН, что предотвращает непредвиденные аварийные ситуации, повышает безопасность испытаний и применения управляемых ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
Изобретение относится к военной технике, а именно к системам управляемого оружия и ракетной технике с головками самонаведения (ГСН), и может быть использовано в артиллерийских управляемых снарядах с ГСН. При отработке, испытаниях управляемых ракет, а также в боевых условиях в случае некорректного выхода на режим работы ГСН полет управляемой ракеты на конечном участке траектории произойдет без самонаведения, в результате чего точка падения будет слабо предсказуема. Такая ситуация приведет к повышенной опасности управляемой ракеты, так как при испытаниях управляемая ракета может выйти из зоны разрешенных работ, а также поражению своих объектов в боевых условиях. Технический результат - предотвращение аварийной ситуации, повышение безопасности при использовании управляемых ракет. Согласно изобретению при старте ракеты запускают часовой механизм системы управления ракетой, взводят батарею питания бортовой аппаратуры, разарретируют гироскоп инерциальный. По истечении установленного в часовом механизме времени t1 взводят батареи питания головки самонаведения (ГСН). При выходе на режим одной из батарей питания ГСН отстреливают блок носовой, открывая входной зрачок ГСН в нем по истечении установленного в часовом механизме времени t2. Регистрируют параметры ГСН, сравнивают их с заданными значениями, при отрицательном результате сравнения регистрируемых параметров формируют управляющий сигнал снижения по вертикальной координате канала управления рулевого привода, чем обеспечивают экстренное приведение управляемой ракеты к поверхности земли, причем время t2 устанавливают как время, достаточное для приведения ГСН в рабочее состояние и выхода ее параметров на заданный режим после взведения батарей питания ГСН, но меньшее времени ожидаемого захвата цели. 2 ил.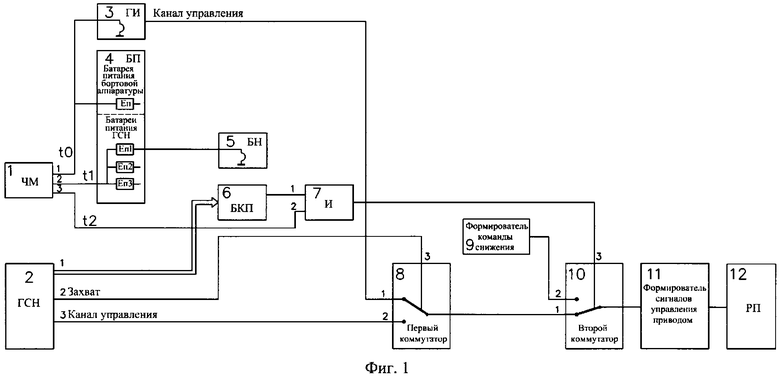
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2199715C2 |
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| DE 3310403 A1, 20.09.1984 | |||
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |

