Текст описания в факсимильном виде (см. графическую часть) Та
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |

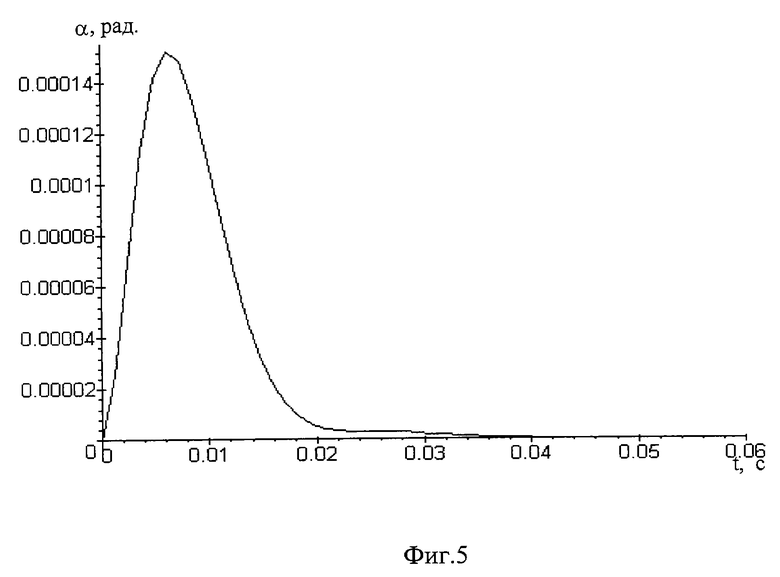
Изобретение относится к области приборостроения. Оно может быть использовано в бесплатформенных и платформенных системах ориентации, навигации и стабилизации подвижных объектов - самолетов, кораблей, автомобилей и других. Одноосный гиростабилизатор содержит трехстепенный гироскоп с системой стабилизации, включающий в свой состав датчик угла прецессии, установленный по оси подвеса внутренней рамки, выход которого соединен со входом усилителя системы стабилизации, двигатель стабилизации, установленный по оси подвеса наружной рамки, датчик команд, также установленный по оси наружной рамки. Особенностью данного одноосного гиростабилизатора является то, что в состав системы стабилизации введены наблюдающее устройство идентификации и устройство управления двигателем стабилизации. Техническим результатом является снижение динамических и статических погрешностей гиростабилизатора. 5 ил.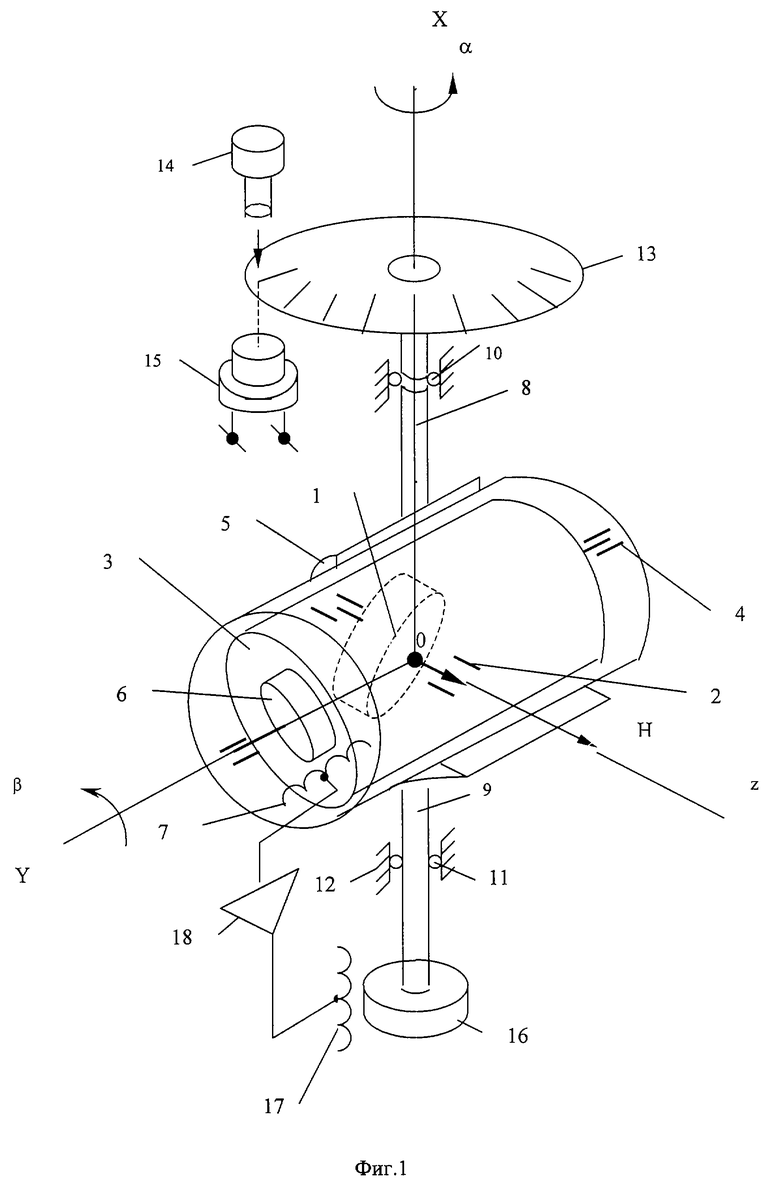
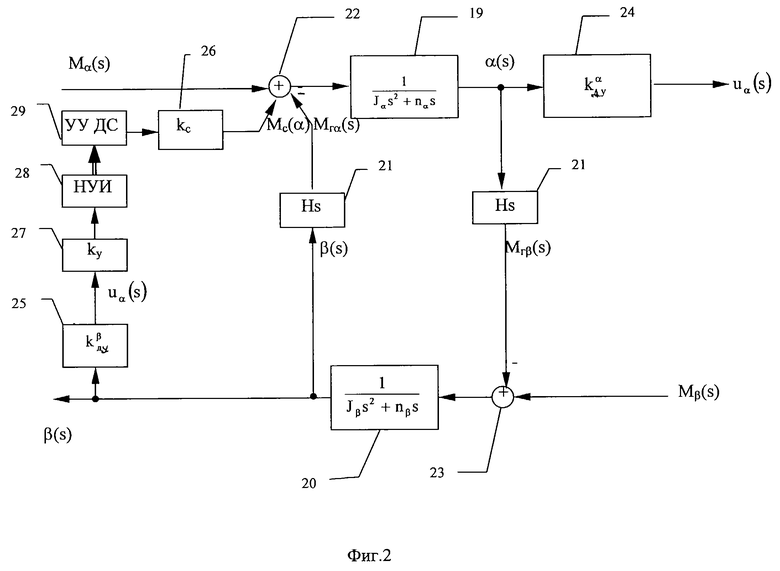
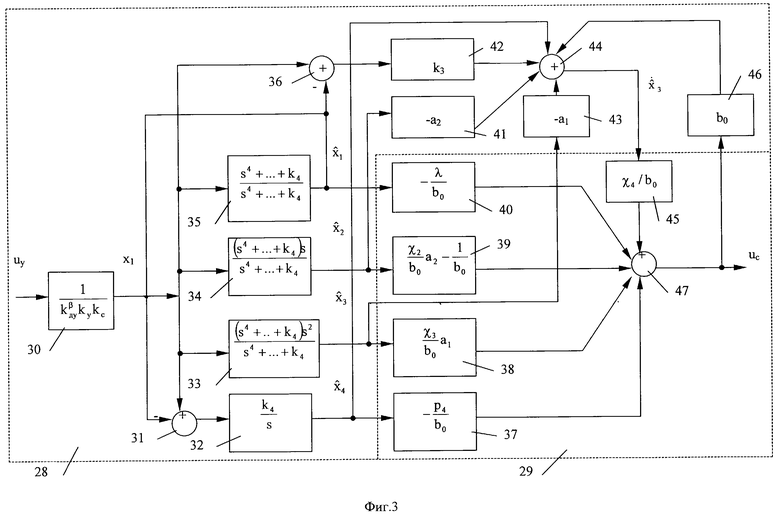
Одноосный гиростабилизатор, содержащий трехстепенный гироскоп с системой стабилизации, включающий в свой состав датчик угла прецессии, установленный по оси подвеса внутренней рамки, выход которого соединен с входом усилителя системы стабилизации, двигатель стабилизации и датчик команд, установленные по оси подвеса наружной рамки, отличающийся тем, что в состав системы стабилизации введены наблюдающее устройство идентификации, включающее блок масштабных коэффициентов, дифференцирующие устройства нулевого, первого и второго порядков, первое, второе и третье суммирующие устройства, первый, второй, седьмой и девятый масштабный элементы, устройство управления двигателем стабилизации, включающее третий, четвертый, пятый, шестой и восьмой масштабные элементы и четвертый суммирующий элемент, при этом вход наблюдающего устройства идентификации соединен с выходом усилителя системы стабилизации, его выходы соединены со входами устройства управления двигателем стабилизации, выход которого соединен с обмоткой управления двигателя стабилизации, при этом выход усилителя соединен с входом блока масштабных коэффициентов, выход которого соединен с входами дифференцирующих устройств соответственно нулевого, первого и второго порядков, а также с входами первого и второго суммирующих устройств, вход второго суммирующего устройства также соединен с выходом дифференцирующего устройства нулевого порядка, выход второго суммирующего устройства соединен с входом первого масштабного элемента, вход первого суммирующего устройства также соединен с выходом дифференцирующего устройства нулевого порядка, выход первого суммирующего устройства соединен с входом интегратора, выход которого соединен с входом шестого масштабного элемента, вход третьего масштабного элемента соединен с выходом дифференцирующего устройства нулевого порядка, выход дифференцирующего устройства первого порядка соединен с входами второго и четвертого масштабных элементов, выход дифференцирующего устройства второго порядка соединен с входами пятого и седьмого масштабных элементов, входы третьего суммирующего устройства соединены с выходами первого, второго, седьмого и девятого масштабных элементов и выходом интегрирующего устройства, выход третьего суммирующего устройства соединен с входом восьмого масштабного элемента, выход которого соединен с входом четвертого суммирующего устройства, входы четвертого суммирующего устройства также соединены с выходами третьего, четвертого, пятого и шестого масштабных элементов, выход четвертого суммирующего устройства соединен с входом девятого масштабного элемента и с обмоткой управления двигателя стабилизации.
| ПЕЛЬПОР Д.С | |||
| Гироскопические системы | |||
| Теория гироскопов и гиростабилизаторов | |||
| - М.: Высшая школа, 1986, с | |||
| Аппарат для нагревания окружающей его воды | 1920 |
|
SU257A1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| Способ получения продуктов конденсации сульфоароматических жирных кислот с альдегидами | 1924 |
|
SU8801A1 |
| US 4989466 A, 05.02.1991 | |||
| Пуговица | 0 |
|
SU83A1 |

