Изобретение относится к устройствам для остановки или замедления электродвигателей путем электромеханического торможения, а также к тормозам с раздвигающимися наружу тормозящими органами, взаимодействующими с поверхностью барабана.
Известны различные конструкции устройств для управления электромагнитными тормозами.
Например, устройство для управления электромеханическими тормозами асинхронного электродвигателя, содержащее суммирующий трансформатор и тормозной электромагнит, не предусматривает двухступенчатого торможения, действует мгновенно, вследствие чего образует определенные трудности при его эксплуатации (см. описание изобретения к авт. свид. СССР №982182 А, кл. Н 02 Р 15/00, опубл. 30.06.84 г.).
Известна также электрическая схема магнитного контроллера, содержащая реверсивный контактор, включенный в силовую цепь электродвигателя, и тормозное устройство в виде тормозного магнита (см. В.Н.Федосеев, М.М.Рунов. Пособие машинисту мостового крана. М., Машиностроение. 1984, с.129). Эта схема также не предусматривает двухступенчатого торможения исполнительного органа.
В качестве прототипа выбрано известное устройство для торможения электромеханического привода моста грузоподъемного крана, включающее силовую цепь электродвигателя, в которую последовательно включен реверсивный контактор и параллельно - электродвигатель гидротолкателя тормоза (см. Паспорт крана мостового электрического. Принципиальная электрическая схема, чертеж №1-4845 СхЭ. Ташкентский завод подъемно-транспортного машиностроения " Подъемник". Ташкент, 1968 г., заводской №34615).
Известное устройство обладает тем основным недостатком, что не обеспечивает надежной работы, так как при плавном торможении электромеханического привода моста не происходит четкой остановки моста крана в заданном месте, а при резком (аварийном) происходит небезопасное раскачивание груза. Т.е. фактически в прототипе осуществляется одноступенчатое торможение моста грузоподъемного крана.
В основу изобретения поставлена задача повышения надежности торможения моста грузоподъемного крана путем организации двухступенчатого торможения одним и тем же тормозом: I ступень - плавное торможение (подтормаживание), II ступень - четкое торможение (для остановки в заданном месте). В случае возникновения аварийной ситуации производят аварийное торможение в режиме II ступени, минуя I ступень.
Поставленная задача решается тем, что в устройстве для торможения электромеханического привода моста грузоподъемного крана, включающем силовую цепь электродвигателя, в которую последовательно включен реверсивный контактор и параллельно - электродвигатель гидротолкателя тормоза, согласно изобретению в силовую цепь электродвигателя электромеханического привода моста параллельно включено реле пуска электродвигателя гидротолкателя тормоза, нормально открытые контакты которого последовательно включены в силовую цепь электродвигателя гидротолкателя тормоза, параллельно одному из контактов последней включен нормально открытый контакт промежуточного реле, причем в силовую цепь электродвигателя электромеханического привода моста параллельно включен блок автоматики двухступенчатого торможения, содержащий промежуточное реле и реле времени.
При этом промежуточное реле и реле времени включены в блок автоматики параллельно между собой, причем в цепь промежуточного реле последовательно включены нормально открытый контакт реле пуска электродвигателя гидротолкателя тормоза и нормально закрытый контакт реле времени с выдержкой времени на размыкание, в цепь реле времени последовательно включены нормально открытый контакт промежуточного реле и нормально закрытый контакт реле пуска электродвигателя гидротолкателя тормоза, а параллельно нормально открытому контакту реле пуска электродвигателя гидротолкателя тормоза включен нормально открытый контакт промежуточного реле.
Благодаря организации двухступенчатого торможения, плавного и четкого, повышается надежность торможения электромеханического привода моста грузоподъемного крана, а также улучшаются условия технологического процесса, который обслуживает кран.
Кроме этого не требуются дополнительные электрические связи между коммутирующим устройством (реверсивным контактором и контактом промежуточного реле) и исполнительным органом (электродвигателем гидротолкателя тормоза), так как используются существующие электрические провода.
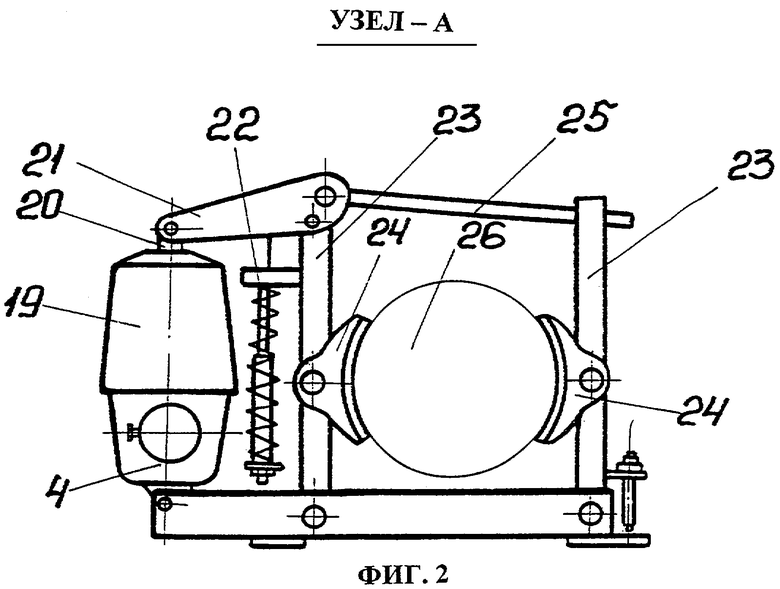
Ниже сущность изобретения поясняется на примере его выполнения со ссылкой на прилагаемые чертежи, на фиг.1 которых изображена принципиальная электрическая схема предлагаемого устройства для торможения электромеханического привода моста грузоподъемного крана, а на фиг.2 (узел А) изображена кинематическая схема электрогидромеханического тормоза в положении полного торможения тормозного шкива моста.
Предлагаемое устройство содержит силовую цепь 1 электродвигателя 2 электромеханического привода моста, в которую последовательно включен реверсивный контактор 3 и параллельно - электродвигатель 4 гидротолкателя тормоза. В силовую цепь 1 электродвигателя 2 параллельно включено реле пуска 5 электродвигателя гидротолкателя тормоза, нормально открытые контакты 6 которого последовательно включены в силовую цепь 7 электродвигателя 4 гидротолкателя тормоза. Параллельно одному из контактов 6 силовой цепи 7 включен нормально открытый контакт 8 промежуточного реле 9.
В силовую цепь 1 электродвигателя 2 параллельно включен блок автоматики 10 двухступенчатого торможения, содержащий промежуточное реле 9 и реле времени 11. включенные параллельно между собой.
В цепь промежуточного реле 9 последовательно включены нормально открытый контакт 12 реле пуска 5 электродвигателя гидротолкателя тормоза и нормально закрытый контакт 13 реле времени с выдержкой времени на размыкание.
В цепь реле времени 11 последовательно включены нормально открытый контакт 14 промежуточного реле и нормально закрытый контакт 15 реле пуска 5 электродвигателя гидротолкателя тормоза.
Параллельно нормально открытому контакту 12 реле пуска электродвигателя гидротолкателя тормоза включен нормально открытый контакт 16 промежуточного реле.
Блок автоматики 11 снабжен автоматическим выключателем 17, который защищает его (блок) от токов короткого замыкания.
Силовая цепь 7 электродвигателя 4 гидротолкателя тормоза также оборудована автоматическим выключателем 18, который защищает электродвигатель 4 и элементы силовой цепи от токов короткого замыкания.
Электродвигатель 4 и гидротолкатель 19 являются приводом электрогидромеханического тормоза моста. Шток 20 гидротолкателя 19 посредством рычага 21 кинематически связан с возвратной пружиной 22 и поворотними стойками 23 с тормозными колодками 24, причем поворотные стойки 23 связаны вверху регулировочной тягой 25.
Тормозные колодки 24 установлены с возможностью периодического контактирования с тормозным шкивом 26.
Устройство для торможения электромеханического привода моста грузоподъемного крана работает следующим образом.
При включении реверсивного контактора 3 замыкается силовая цепь 1 электродвигателя 2 электромеханического привода моста. При этом одновременно включается реле пуска 5 электродвигателя гидротолкателя тормоза, который своими нормально открытыми контактами 6 замыкает силовую цепь 7 электродвигателя 4 гидротолкателя тормоза моста. Одновременно замыкается нормально открытый контакт 12 реле пуска в цепи промежуточного реле 9, которое включается и замыкает свои нормально открытые контакты 8 и 16, шунтируя соответственно один из контактов 6 силовой цепи электродвигателя 4 и контакт 12 цепи промежуточного реле. Одновременно размыкается нормально закрытый контакт 15 в цепи реле времени 11.
При этом нормально закрытый контакт 13 реле времени с выдержкой времени на размыкание продолжает быть замкнутым, благодаря чему промежуточное реле 9 остается включенным. Одновременно замыкается нормально открытый контакт 14 промежуточного реле в цепи реле времени 11, но цепь реле времени 11 в силу вышеизложенного остается обесточенной.
При выключении реверсивного контактора 3 выключается реле пуска 5, и его контакты 6 в силовой цепи 7 электродвигателя 4 размыкаются, благодаря чему одновременно включается нормально закрытый контакт 15 в цепи реле времени 11, и последнее включается.
Электродвигатель 4 переходит в режим работы от двух фаз, поскольку контакт 8 остается включенным, и в силу этого снижает число оборотов, производя подтормаживание.
Происходит I ступень торможения - плавное подтормаживание. Далее реле времени 11 после отработки заданной уставки срабатывает, размыкая свой нормально закрытый контакт 13 с выдержкой времени на размыкание, который обесточивает промежуточное реле 9, которое своим контактом 8 обесточивает электродвигатель 4 гидротолкателя тормоза. Происходит отключение оставшихся двух фаз, что вызывает полное торможение электромеханического привода моста.
Далее происходит полное торможение моста следующим образом.
При работающем на трех фазах электродвигателе 4 перед I ступенью торможения шток 20 гидротолкателя 19 полностью выдвинут вверх, а возвратная пружина 22 с помощью рычага 21 находится в предельно сжатом состоянии, и поворотные стойки 23 с тормозными колодками 24 находятся в разведенном состоянии относительно тормозного шкива 26.
На I ступени торможения (подтормаживании), когда электродвигатель 4 работает на двух фазах и число оборотов его снижается, возвратная пружина 22 частично разжимается, а шток 20 частично утапливается вниз, вследствие чего поворотные стойки 23 с тормозными колодками 24 сближаются до соприкосновения последних с тормозным шкивом 26.
Происходит подтормаживание шкива 26 с частичным усилием нажатия колодок 24.
На II ступени торможения (полном торможении), когда электродвигатель 4 полностью отключен, возвратная пружина 22 полностью разжимается, а шток 20 полностью утапливается вниз, вследствие чего усилие нажатия тормозных колодок 24 на тормозной шкив 26 увеличивается до максимального значения.
Происходит полное торможение моста грузоподъемного крана.
Надежность двухступенчатого торможения моста особенно ярко проявляется в черной металлургии при перевозке ковшей с жидким металлом, так как двухступенчатое торможение предотвращает раскачивание груза и выплескивание металла и обеспечивает возможность установки технологичесого груза в заданной точке за один прием, например установка поддона на карусельный станок для обработки или посадка кокиля на стержень в литейном цехе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА ТЕЛЕЖКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2283532C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277746C1 |
| Способ торможения электропривода переменного тока и устройство для его осуществления | 1983 |
|
SU1234938A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для автоматического торможения электрического крана | 1941 |
|
SU66968A1 |
| Тормозная система транспортного средства с рессорным пневмоподвешиванием | 1980 |
|
SU996244A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
Изобретение относится к электротехнике и может быть использовано в устройствах для остановки или замедления электродвигателей путем электромеханического торможения, а также в тормозах с раздвигающимися наружу тормозящими органами, взаимодействующими с поверхностью барабана. Техническим результатом является повышение надежности торможения моста грузоподъемного крана путем организации двухступенчатого торможения одним и тем же тормозом. Устройство для торможения электромеханического привода моста грузоподъемного крана включает силовую цепь электродвигателя, в которую последовательно включен реверсивный контактор и параллельно - электродвигатель гидротолкателя тормоза. В силовую цепь электродвигателя электромеханического привода моста параллельно включено реле пуска электродвигателя гидротолкателя тормоза, нормально открытые контакты которого последовательно включены в силовую цепь электродвигателя гидротолкателя тормоза, а параллельно одному из контактов последней включен нормально открытый контакт промежуточного реле. В силовую цепь электродвигателя электромеханического привода моста параллельно включен блок автоматики двухступенчатого торможения, содержащий промежуточное реле и реле времени. Промежуточное реле и реле времени включены в блок автоматики параллельно между собой. В цепь промежуточного реле последовательно включены нормально открытый контакт реле пуска электродвигателя гидротолкателя тормоза и нормально закрытый контакт реле времени с выдержкой времени на размыкание. В цепь реле времени последовательно включены нормально открытый контакт промежуточного реле и нормально закрытый контакт реле пуска электродвигателя гидротолкателя тормоза. Параллельно нормально открытому контакту реле пуска электродвигателя гидротолкателя тормоза включен нормально открытый контакт промежуточного реле. 2 ил.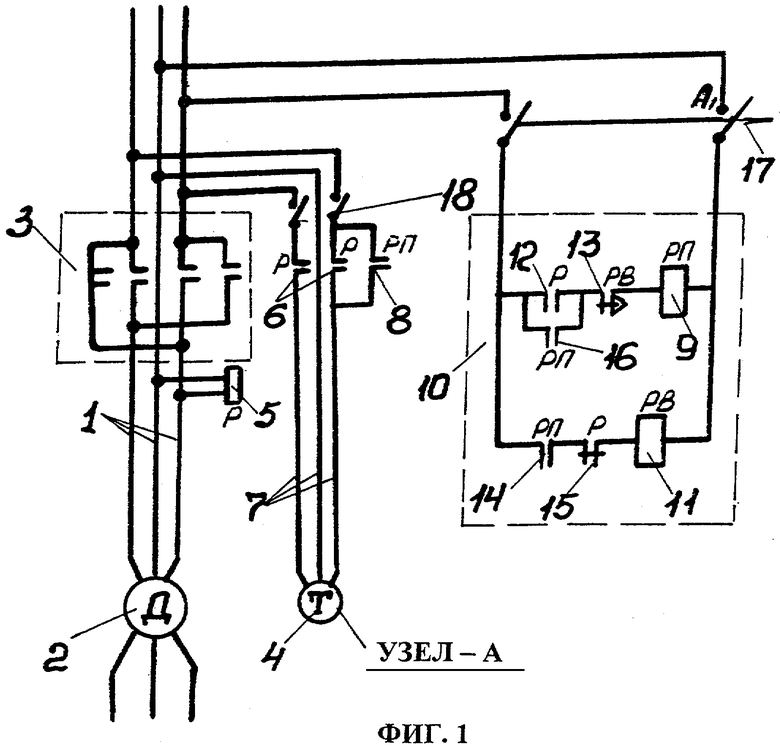
Устройство для торможения электромеханического привода моста грузоподъемного крана, включающее силовую цепь электродвигателя, в которую последовательно включен реверсивный контактор и параллельно электродвигатель гидротолкателя тормоза, отличающееся тем, что в силовую цепь электродвигателя электромеханического привода моста параллельно включено реле пуска электродвигателя гидротолкателя тормоза, нормально открытые контакты которого последовательно включены в силовую цепь электродвигателя гидротолкателя тормоза, в силовую цепь электродвигателя электромеханического привода моста параллельно включен блок автоматики двухступенчатого торможения, содержащий промежуточное реле и реле времени, которые включены между собой параллельно, причем в цепь промежуточного реле последовательно включены нормально открытый контакт реле пуска электродвигателя гидротолкателя тормоза и нормально закрытый контакт реле времени с выдержкой времени на размыкание, в цепь реле времени последовательно включены нормально открытый контакт промежуточного реле и нормально закрытый контакт реле пуска электродвигателя гидротолкателя тормоза, а параллельно одному из нормально открытых контактов реле пуска электродвигателя гидротолкателя тормоза включен нормально открытый контакт промежуточного реле.
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2075819C1 |
| ЭЛЕКТРОПРИВОД | 2001 |
|
RU2210853C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОГО ТОРМОЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 0 |
|
SU377948A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Устройство для удаления буровой мелочи от устья скважины | 1984 |
|
SU1198199A1 |
| US 3772579 A, 13.11.1973 | |||
| Бесконтактный датчик направления потока | 1976 |
|
SU584256A1 |
| СПОСОБ МОБИЛИЗАЦИИ ДИСТАЛЬНОЙ ЧАСТИ ЖЕЛУДКА ПРИ ЕГО РЕЗЕКЦИИ | 1992 |
|
RU2067426C1 |
| УСОВЕРШЕНСТВОВАННОЕ ГАРМОНИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ НА ОСНОВЕ БЛОКА ПОДДИАПАЗОНОВ | 2011 |
|
RU2518682C2 |
| EP 0259656 A1, 16.03.1988. | |||

