Изобретение относится к области навигации, в частности к способам инерциально-спутниковой навигации, предназначено для определения параметров навигации (координат и скоростей) и может быть использовано при проектировании интегрированных навигационных систем, в особенности для объектов с малым временем эксплуатации.
Известен способ инерциальной навигации [Захарин М.И. Кинематика инерциальных систем навигации / М.И.Захарин, Ф.Ш.Захарин. - М.: Машиностроение, 1968. - 236 с.], состоящий в обработке информации, получаемой от блока инерциальных чувствительных элементов - трех акселерометров и трех гироскопов. Процесс обработки включает в себя интегрирование сигналов.
К основным недостаткам инерциальных навигационных систем причисляют наличие постоянно нарастающей ошибки и зависимость точности от начальной выставки. К достоинствам данных систем можно отнести автономность и возможность выдачи параметров навигации с высокой частотой.
Известен способ спутниковой навигации [Соловьев Ю.А. Системы спутниковой навигации / Ю.А.Соловьев. - М.: КТЦ-"Эко-Трендз", 2000. - 368 с.], состоящий в измерении времени распространения радиосигнала от навигационных спутников, например GPS или ГЛОНАСС, до объекта, параметры навигации которого необходимо определить, в измерении допплеровского сдвига частоты принимаемых сигналов навигационных спутников, и вычисления параметров навигации на основе результатов этих измерений.
Способ спутниковой навигации свободен от недостатков, присущих методу инерциальной навигации. Недостатком способа является то, что для определения параметров навигации объекта без привлечения дополнительной информации требуется одновременный прием сигналов как минимум от 4-х навигационных спутников. К недостаткам спутниковой навигации также можно отнести относительно малую частоту выдачи информации и наличие случайно распределенной ошибки.
Наиболее близким заявляемому способу по совокупности существенных признаков является способ инерциально-спутниковой навигации [описание изобретения к патенту РФ №2277696 от 10.10.2005, МПК G01C 23/00, G01S 5/14, опубл. 10.06.2006, бюл. №16], состоящий в определении параметров навигации посредством спутниковой навигационной системы, определении параметров навигации посредством инерциальной навигационной системы, определении проекций векторов линейного ускорения и угловой скорости подвижного объекта, передаче указанных параметров в блок комплексирования, где они обрабатываются с использованием алгоритма обобщенного фильтра Калмана. Блок комплексирования вырабатывает оценки параметров навигации и оценки ошибок в определении вектора угловой скорости и линейного ускорения, которые передаются в инерциальную навигационную систему для коррекции показаний ее чувствительных элементов в блоке коррекции угловой скорости и блоке коррекции ускорений соответственно.
Данный способ имеет существенный недостаток, заключающийся в том, что комплексирование сигналов инерциальной и спутниковой навигационной системы невозможно осуществить при наличии сигналов только от двух спутников, хотя при эксплуатации спутниковых и интегрированных навигационных систем такое состояние группировки навигационных спутников возможно.
Задача, решаемая настоящим изобретением, и достигаемый технический результат заключаются в создании способа определения параметров навигации подвижного объекта при помощи интегрированной навигационной системы с использованием данных спутниковой навигационной системы, аппаратура приемника которой вырабатывает навигационную информацию, базирующуюся на использовании сигналов только от двух спутников.
Для получения заявленного технического результата в способе определения параметров навигации, включающем получение информации о параметрах навигации от инерциальной и спутниковой навигационных систем, входящих в состав интегрированной системы навигации, последующую обработку информации, позволяющую осуществить комплексирование сигналов спутниковой и инерциальной навигационных систем для того, чтобы получить значения скорректированных параметров навигации, а также величин ошибок значений, вырабатываемых инерциальной навигационной системой, передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ей в последующие моменты времени параметров навигации, комплексирование проводят используя информацию от двух навигационных спутников, на основе вырабатываемых аппаратурой приемника спутниковой навигационной системы первичных радионавигационных параметров, а именно псевдодальностей до этих навигационных спутников и псевдоскоростей подвижного объекта относительно этих навигационных спутников, используя значения которых, а также текущие показания инерциальной навигационной системы о параметрах навигации подвижного объекта, находят скорректированные параметры навигации, а разницу между текущими параметрами навигации, вырабатываемыми инерциальной навигационной системой и скорректированными значениями параметров навигации принимают за величины ошибок инерциальной навигационной системы.
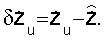
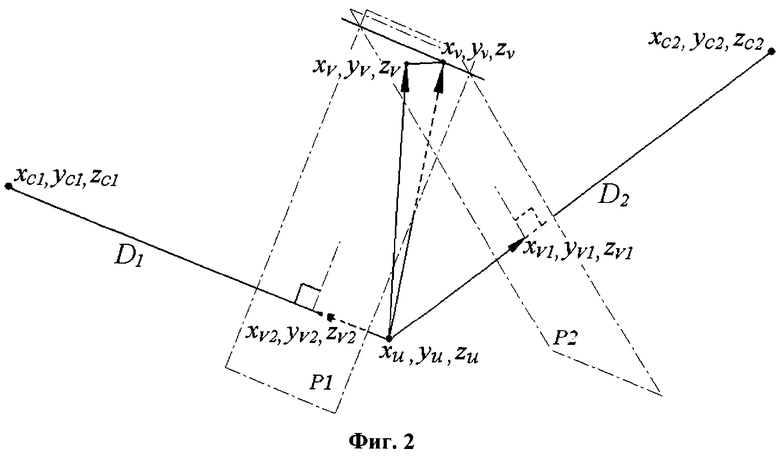
Изобретение иллюстрируется чертежами, где на фиг.1 и 2 условно изображена решаемая навигационная задача для коррекции по координатам и по скорости, соответственно.
Скорректированные координаты и погрешности в определении координат инерциальной навигационной системы при видимости двух спутников определяют следующим образом.
1. Определяют радиальные дальности от объекта до спутника путем вычитания из измеренных спутниковой навигационной системой псевдодальностей  ,
,  величины δD, одинаковой для всех используемых спутников в течение периода работы системы.
величины δD, одинаковой для всех используемых спутников в течение периода работы системы.
2. Определяют координаты центра окружности x0, y0, z0, которая представляет собой геометрическое место точек возможного скорректированного местоположения ПО  по формулам [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 73]:
по формулам [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 73]:


3. Находят параметры уравнения плоскости [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 84]: Р: Ар·х+Вр·y+Ср·z+Dp=0, в которой лежит данная окружность, как перпендикулярной к соединяющей спутники прямой.
Ap=xc2-xc1, Bр=yс2-yс1,
Cp=zc2-zc1, Dр=-Ар·x0-Bp·y0-Cp·z0.
4. На плоскости Р находят точку xu, yu, zu, ближайшую к точке xu, yu, zu по формулам [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 80]:
xp=-xu+Ар·sр,
yp=yu+Bp·sp;
zp=zu+Cp·sp,
где 
5. Находят скорректированное местоположение подвижного объекта , как точку пересечения окружности и прямой, проведенной через ее центр x0, y0, z0 и точку xp, yp, zp в соответствии с формулами:
где 
6. Вычисляют погрешности инерциальной навигационной системы в определении координат по формулам:
Величины δxu, δyu, δzu, полученные в соответствии с п.6, являются сигналами коррекции для инерциальной навигационной системы.
Скорректированный вектор скорости подвижного объекта и погрешности инерциальной навигационной системы в определении вектора скорости находят следующим образом (см. фиг.2).
1. Определяют радиальные скорости от объекта до спутника путем вычитания из измеренных спутниковой навигационной системой псевдоскоростей  ,
,  величину
величину  одинаковую для всех используемых спутников в течение периода работы системы.
одинаковую для всех используемых спутников в течение периода работы системы.
2. Определяют координаты концов векторов xVi, yVi, zVi, радиальной скорости подвижного объекта относительно спутников по формулам:


где i - индекс используемого спутника (1 или 2),  ,
,  ,
,  - проекции вектора скорости спутника из навигационного сообщения,
- проекции вектора скорости спутника из навигационного сообщения, 
 - направляющие косинусы [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 24] вектора радиальной скорости;
- направляющие косинусы [Воднеев В.Т. Основные математические формулы. Справочник / В.Т.Воднеев, А.Ф.Наумович, Н.Ф.Наумович. - Минск: «Вышэйшая школа», 1995. - 379 с., на странице 24] вектора радиальной скорости;  - составляющая измеряемой радиальной скорости, обусловленная движением спутника.
- составляющая измеряемой радиальной скорости, обусловленная движением спутника.
Измерения от спутников в качестве геометрического места точек конца скорректированного вектора скорости подвижного объекта дают прямую, лежащую на пересечении плоскостей, которым принадлежат точки хVi, yVi, zVi, и которые перпендикулярны прямым, соединяющим спутники и ПО.
3. Находят параметры уравнений плоскостей Pi: Aixp+Вiур+Cizp+Qi=0, которым принадлежат точки xVi, yVi, zVi, и которые перпендикулярны прямым, соединяющим спутники и подвижный объект в соответствии с формулами:
Аi=li, Bi=mi,
Сi=ni; 
4. Вычисляют параметры уравнений линии пересечения плоскостей P1 и Р2 по формулам:
xp=x0p+lp·s;
ур=y0р+mp·s;
zp=z0p+np·s;
lp=B1C2-B2C1; mp=C1A2-C2A1; np=А1B2-А2B1;
 ,
,
где s - переменный параметр.
5. Находят координаты конца вектора скорости подвижного объекта, известной по измерениям инерциальной навигационной системы:
6. Находят координаты конца скорректированного вектора скорости:
xν=x0p+lр·s0;
yν=y0р+mp·s0;
zν=z0p+nр·s0,
где s0=(xV-x0v)lp+(yV-y0v)mp+(zV-z0v)np.
7. Координаты скорректированного вектора скорости  находят по формулам:
находят по формулам:



8. Вычисляют погрешности инерциальной навигационной системы в определении скорости в соответствии с формулами:
Величины 

 полученные в соответствии с п.8, являются сигналами коррекции для инерциальной навигационной системы.
полученные в соответствии с п.8, являются сигналами коррекции для инерциальной навигационной системы.
Применение найденного решения в интегрированной навигационной системе обеспечивает возможность определения параметров навигации при использовании данных спутниковой навигационной системы, получающей информацию только от двух навигационных спутников, что снижает зависимость системы от состояния группировки навигационных спутников на момент использования подвижного объекта.
Проведенное математическое моделирование показало работоспособность предлагаемого метода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАВИГАЦИИ | 2007 |
|
RU2338160C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2009 |
|
RU2422844C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
Изобретение относится к области приборостроения и может быть использовано при проектировании интегрированных навигационных систем, в особенности для объектов с малым временем эксплуатации. Технический результат - расширение функциональных возможностей. Для достижения данного результата осуществляют сбор и обработку сигналов спутниковой и инерциальной навигационных систем. При этом комплексирование ошибок измерения проводят используя сигналы от двух навигационных спутников на основе вырабатываемых аппаратурой приемника спутниковой навигационной системы первичных радионавигационных параметров. Определяют скорректированные параметры навигации, а разницу между текущими параметрами навигации принимают за величины ошибок инерциальной навигационной системы. 2 ил.
Способ определения параметров навигации, включающий получение информации о параметрах навигации от инерциальной и спутниковой навигационных систем, входящих в состав интегрированной системы навигации, последующую обработку информации, осуществляющую комплексирование сигналов спутниковой и инерциальной навигационных систем для того, чтобы получить значения скорректированных параметров навигации, и величин ошибок значений, вырабатываемых инерциальной навигационной системой, передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ей в последующие моменты времени параметров навигации, отличающийся тем, что комплексирование проводят, используя информацию от двух навигационных спутников, на основе вырабатываемых аппаратурой приемника спутниковой навигационной системы первичных радионавигационных параметров, а именно псевдодальностей до этих навигационных спутников и псевдоскоростей подвижного объекта относительно этих навигационных спутников, используя значения которых, а также текущие показания инерциальной навигационной системы о параметрах навигации подвижного объекта, находят скорректированные параметры навигации, а разницу между текущими параметрами навигации, вырабатываемыми инерциальной навигационной системой и скорректированными значениями параметров навигации принимают за величины ошибок инерциальной навигационной системы.
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| Соловьев Ю.А | |||
| Системы спутниковой навигации | |||
| - М.: КТЦ-"Эко-Трендз", 2000, с.368 | |||
| Захарин М.И | |||
| Кинематика инерциальных систем навигации / М.И.Захарин, Ф.Ш.Захарин | |||
| - М.: Машиностроение, 1968, с.236 | |||
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2000 |
|
RU2173835C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 1997 |
|
RU2125238C1 |
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |
| Федоров С.М., Михайлов О.И., Сухих Н.Н | |||
| Бортовые информационно-управляющие системы | |||
| - М.: Транспорт, 1994, с.125-126. | |||

