1
(21)4394442/27-03
(22)11.01.88
(46) 30.03.90. Бкш. № 12 (72) Э.Е.Кац и М.Ф.Юрченко
(53)621.867.154 (088.8)
(56)Авторское свидетельство СССР 1206077, кл. В 65 J 1/02, 1983.
Авторское свидетельство СССР 658051, кл. В 65 G 47/52, 1977.
,
(54)УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И ПЕРЕДАЧИ ГРУЗОВ НА ПАЛЕТАХ МЕЖДУ РАБОЧИМИ ПОЗИЦИЯМИ
(57)Изобретение относится к подъемно- транспортным механизмам. Цель изобретения - повышение надежности работы. Устройство включает размещенную на ходовом пути 2 тележку 1 с траверсой 3 со штырями 4 и приспособление 5 для фиксации палеты 6. На тележке t установлен привод 7 вертикального перемещения траверсы 3. На торцах тележки 1 установленн упоры в виде роликов. Траверса 3 ввязана с тележкой 1 гибки- - ми элементами 9, которые выполнены- из верхней 10 и нижней И частей цепи. Нижняя часть цепи оснащена ограничителями поворота звеньев цепи и закреплена на траверсе 3. Верхние части-закреплены-на шкивах 8. Штыри 4 травер
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Стыковочное устройство | 1986 |
|
SU1393631A1 |
| Устройство смены палет в гибком производственном модуле | 1986 |
|
SU1425049A1 |
| Автомат пакетной садки кирпича на печную вагонетку | 1980 |
|
SU944937A1 |
| Гибкая автоматизированная линия | 1988 |
|
SU1668104A1 |
| Агрегат для резки листового проката | 1982 |
|
SU1046043A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Гибкий производственный комплекс | 1986 |
|
SU1386424A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
Изобретение относится к подъемно-транспортным механизмам. Цель изобретения - повышение надежности работы. Устройство включает размещенную на ходовом пути 2 тележку 1 с траверсой 3 со штырями 4 и приспособление 5 для фиксации палеты 6. На тележке 1 установлен привод 7 вертикального перемещения траверсы 3. На торцах тележки 1 установлены упоры в виде роликов. Траверса 3 связана с тележкой 1 гибкими элементами 9, которые выполнены из верхней 10 и нижней 11 частей цепи. Нижняя часть цепи оснащена ограничителями поворота звеньев цепи и закреплена на траверсе 3. Верхние части закреплены на шкивах 8. Штыри 4 траверсы 3 выполнены с ограничительной и базирующей частями, обращенными в сторону тележки 1, в которой имеются отверстия 14. В исходном положении палета 6 расположена на столе и тележка 1 устанавливается над ней. Включается привод 7, который вращает шкивы 8, и траверса 3 опирается вниз до захода захватов под стол, после чего они поворачиваются, заходят в проемы стола. Привод 7 включается в обратную сторону, траверса 3 поднимается, захватывая палету 6 захватами. Траверса 3 поднимается вверх до захода штырей 4 в отверстия 14 тележки 1. После этого тележка перемещается на следующую рабочую позицию. 3 з.п. ф-лы, 8 ил.
15 0WI./
I -ч Ч1
Г
сы 3 выполнены с ограничительной и базирующей частями, обращенными в сторону тележки 1, в которой имеются отверстия 14. В исходном положении пале- , та 6 расположена на столе и тележка 1 устанавливается над ней. Включается привод 7, который вращает шкивы 8, и траверса 3 опускается вниз до захода захватов под стол, после чего они -JQ
Изобретение относится к подъемно- транспортным механизмам и может быть использовано для автоматизации погру- зочно-разгрузочных работ и транспортировки грузов на палетах между рабочими позициями оборудования.
Цель изобретения - повышение надежности работы. -
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - гибкий элемент, общий вид На фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - гибкий элемент в поднятом положении; на фиг. 6 - штырь, разрез; на фиг. 7 - устройство, начало подъема траверсы, обций вид; на фиг. 8 - устройство в транспортном положении.
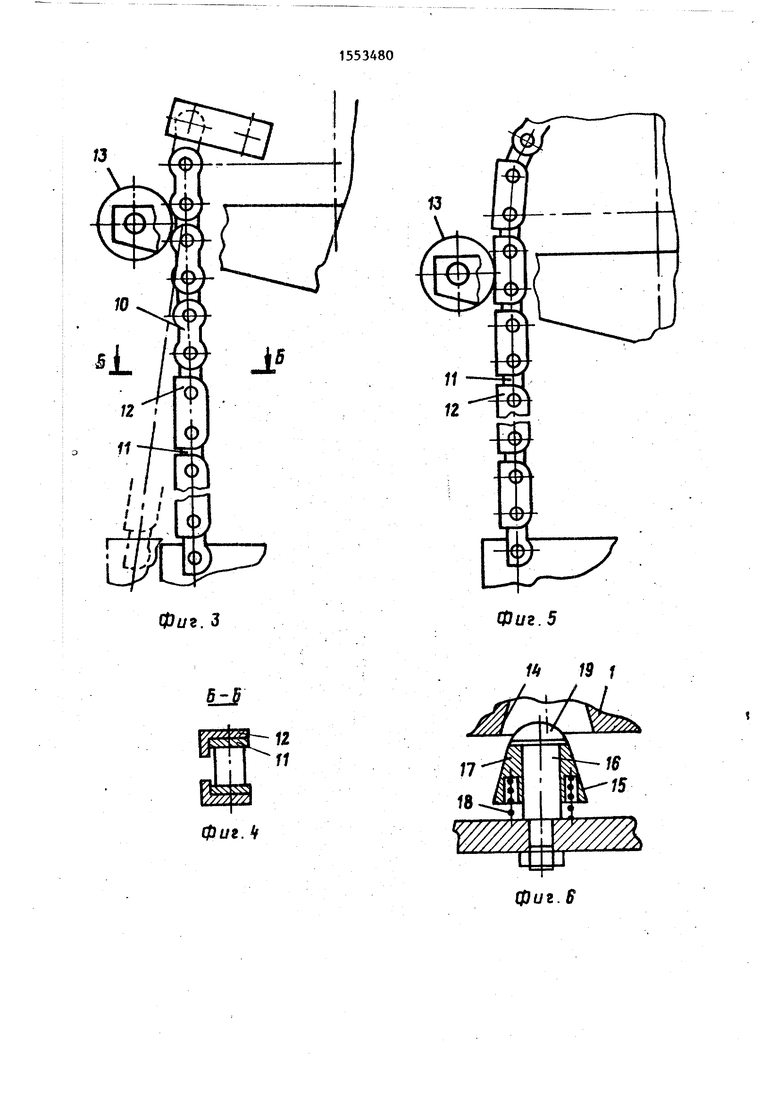
Устройство содержит тележку 1, размещенную с возможностью перемещения н ходовом пути 2 подвесного конвейера. К тележке 1 подвешена траверса 3 со , штырями 4 и приспособление 5 для фиксации палет 6. На тележке 1 размещен привод 7 вертикального перемещения траверсы 3, который состоит из кинематически связанных между, собой мотор-редуктора с набором шестерен и шкивов 8. На каждом шкиве 8 жестко закреплен один конец гибкого элемента 9, другой конец закреплен на траверсе 3. Гибкий элемент 9 выполнен из верхней 10 и тошней 11 частей цепи, шарнирно соединенных между собой, при этом верхняя часть 10 выполнена в виде втулочно-роликовой цепи, а нижняя часть 11 снабжена ограничителями 12 поворота сЪседних звеньев, установленными на каждом втором звене цепи.
Тележка 1 оснащена упорами 13, выполненными в виде роликов, которые установлены по торцам тележки 1 с возможностью взаимодействия с нижней частью 11 гибких элементов 9. На траверсе 3 установлены штыри 4, а в
поворачиваются, заходят в проемы стола. Привод 7 включаетая в обратную сторону, траверса 3 поднимается, захватывая палету 6 захватами. Траверса 3 поднимается до захода штырей 4 Б отверстия 14 тележки 1„ После этого тележка перемещается на следующую рабочую позицию. 3 з.п„ ф-лы, 8 ил.
0
5 0
$
0
5
тележке 1 выполнены отверстия 14 под эти штыри. Последние выполнены с конусной поверхностью 15, состоят из ограничительной 16 и базирующей 17 частей. Базирующая часть 17 выполнена в виде втулки, установленной на ограничительной части 16 с возможностью осевого перемещения, и подпружинена пружиной 18. Ограничительная часть 16 выполнена в виде стержня с головкой 19.
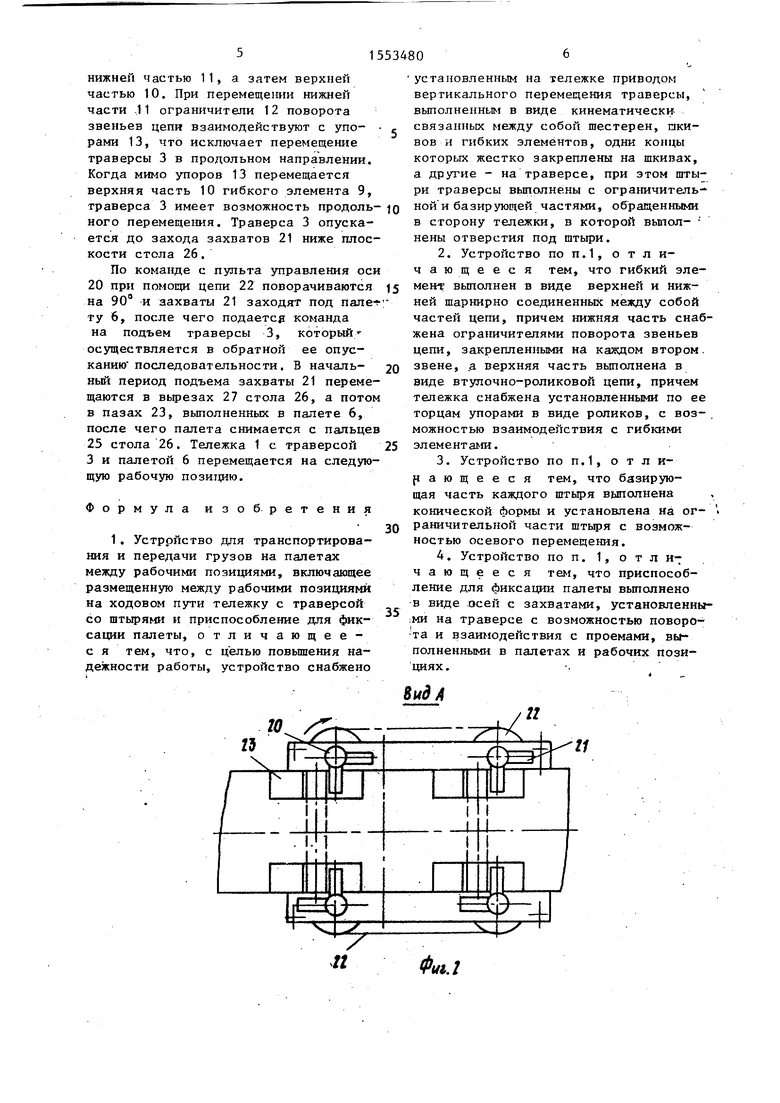
Приспособление для фиксации палеты 6 состоит из осей 20, которые установлены на траверсе 3 с возможностью поворота. На нижнем конце оси 20 закреплен захват 21. Привод поворота осей 20 смонтирован на траверсе 3 (не показан) и связан при помощи цепи 22 со звездочками, закрепленными н верхних концах осей 20. В палете 6 выполнены пазы 23 для захватов 21 и отверстия 24 для пальцев 25 стола 26, на котором выполнены вырезы 27, имеющие в поперечном сечении трапецеидальную форму для взаимодействия с захватами 21.
Устройство работает следующим образом,
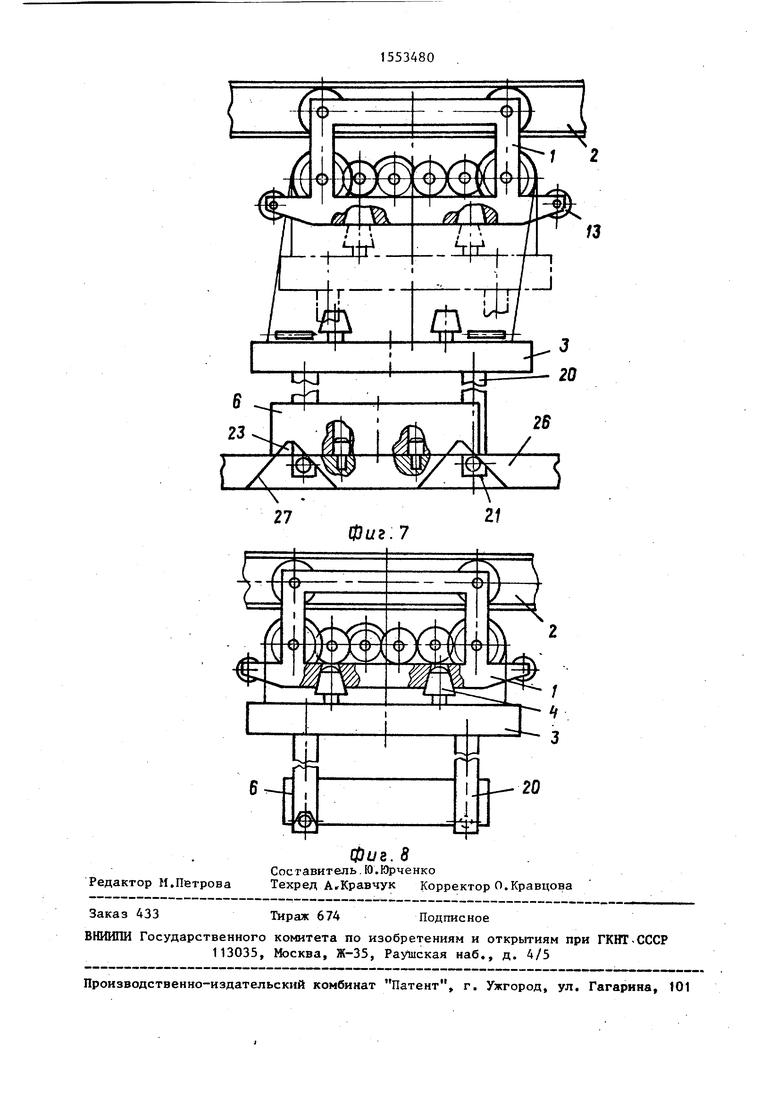
В исходном положении траверса 3 находится в верхнем поднятом положении и зафиксирована штырями 4 в корпусе тележки 1, а палета 6 установлена на столе 26. По команде с пульта управления (не показан) тележка 1 перемещается по ходовому пути 2 и устанавливается над палетой 6. Включается привод 7 вертикального перемещения траверсы 3, который поворачивает шкивы 8, разматываются закрепленные на них гибкие элементы 9 и траверса 3 под собственным весом опускаетс я. При этом штыри 4 выходят из отверстий 14 тележки 1, а гибкий элемент 9 перемещается мимо упора 13 сначала
нижней частью 11, а затем верхней частью 10. При перемещении нижней части 11 ограничители 12 поворота звеньев цепи взаимодействуют с упорами 13, что исключает перемещение траверсы 3 в продольном направлении. Когда мимо упоров 13 перемещается верхняя часть 10 гибкого элемента 9,
установленным на тележке приводом вертикального перемещения траверсы, выполненным в виде кинематически связанных между собой шестерен, пки- вов и гибких элементов, одни концы которых жестко закреплены на шкивах, а другие - на траверсе, при этом штыри траверсы выполнены с ограничительтраверса 3 имеет возможность продоль- JQ ной и базирующей частями, обращенными
ного перемещения. Траверса 3 опускается до захода захватов 21 ниже плоскости стола 26.
По команде с пульта управления оси 20 при помощи цепи 22 поворачиваются 15 на 90° и захваты 21 заходят под пале-1- ту 6, после чего подается команда на подъем траверсы 3, который осуществляется в обратной ее опусканию последовательности. В началь- 20 ный период подъема захваты 21 перемещаются в вырезах 27 стола 26, а потом в пазах 23, выполненных в палете 6, после чего палета снимается с пальцев 25 стола 26. Тележка 1 с траверсой 25 3 и палетой 6 перемещается на следующую рабочую позицию.
в сторону тележки, в которой выпол- йены отверстия под штыри.
Формула изобретения
установленным на тележке приводом вертикального перемещения траверсы, выполненным в виде кинематически связанных между собой шестерен, пки- вов и гибких элементов, одни концы которых жестко закреплены на шкивах, а другие - на траверсе, при этом штыри траверсы выполнены с ограничитель15- 20 5
0
5
в сторону тележки, в которой выпол- йены отверстия под штыри.
в виде осей с захватами, установленными на траверсе с возможностью поворота и взаимодействия с проемами, выполненными в палетах и рабочих позициях.
Вид А
В
ff гпф
Fff
Ј 2/7ф
Я
08HS51
Фиг. 7
