Изобретение относится к области аэродинамических испытаний, в частности к определению углового положения летательного аппарата (или его модели) в пространстве, в том числе при имитации его падения, и может быть использовано при проектировании высокоточных элементов кассетных боеприпасов.
Известен способ углового определения положения летательного аппарата в пространстве, относящийся к инерциальной навигации (см. Мартыненко Ю.Г. Тенденции развития современной гироскопии. - Соросовский образовательный журнал, 1997 г., №11, стр.120-127).
Известный способ основан на применении механических гироскопов, создающих опорную систему прямоугольных координат, непосредственно связанную с летательным аппаратом путем установки гироскопов на стабилизированной платформе в карданном подвесе. В настоящее время механические гироскопы заменяются лазерными, позволяющими создавать бесплатформенную систему прямоугольных координат. Этот способ эффективен для летательных аппаратов большой массы, но при определенном соотношении масс гироскопической системы и летательного аппарата он является неприемлемым из-за недопустимого искажения инерционно-массовых характеристик летательного аппарата.
Известен также проекционно-теневой способ определения углового положения летательного аппарата (см. Научно-технический отчет по составной части опытно-конструкторской работы «Сайгак». - ФГУП «ЦАГИ», 2008 г.). Этот способ применяется при аэродинамических испытаниях летательных аппаратов и заключается в том, что в процессе обдува подвешенной на вертикальной подвеске модели летательного аппарата производят киносъемку тени модели летательного аппарата на вертикально установленном экране. Угловое положение летательного аппарата в пространстве определяют по методу последовательных совмещений покадровых изображений тени с контуром уменьшенной модели летательного аппарата. Способ не обеспечивает достаточную точность и неприменим для реальных летательных аппаратов без их макетирования и определения положения центра масс, требует больших затрат времени на обработку результатов.
Задачи, решаемые предлагаемым изобретением, заключаются в расширении ассортимента технических средств указанного назначения с добавлением им технических возможностей.
Указанные задачи решены тем, что в известном способе определения углового положения летательного аппарата (или его модели) в пространстве, при котором летательный аппарат (или его модель) закрепляют на вертикальной подвеске и обдувают потоком воздуха, имитируя его падение (согласно изобретению), вне летательного аппарата (или его модели) создают опорную систему прямоугольных координат, для чего на горизонтальных осях OX и OY устанавливают две вертикальные измерительные стойки, третью измерительную стойку совмещают с вертикальной осью OZ, на плоскости, касательной к поверхности летательного аппарата (или его модели), устанавливают источник лазерного излучения, луч которого (или его развертку) направляют параллельно плоскости, касательной к поверхности летательного аппарата (или его модели), летательный аппарат (или его модель) закрепляют в точке, лежащей на его поверхности, с обеспечением перемещения его центра масс по трем степеням свободы, и фиксируют координаты следов лазерного луча или его развертки на измерительных стойках, а угловое положение летательного аппарата (или его модели) определяют по величине углов (α, β, γ) между перпендикуляром, воображаемо опущенным из точки начала координат на плоскость, образованную разверткой лазерного луча или его перемещением и осями опорной системы прямоугольных координат по формулам
 ;
;
 ;
;
 .
.
где α, β, γ - углы между перпендикуляром к касательной плоскости и осями OX, OY, OZ;
Z0 - координата следа лазерного излучения на измерительной стойке, совмещенной с вертикальной осью OZ;
Z1 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси OX;
Z2 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси OY;
L - расстояние между измерительными стойками относительно начала координат.
Совокупность отличительных признаков предлагаемого технического решения заявителям неизвестна, что является доказательством новизны предложения, а каждый из признаков указанной совокупности со всей очевидностью не следует из уровня техники, что является свидетельством наличия изобретательского уровня в предложении. При этом заявители подчеркивают наличие причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
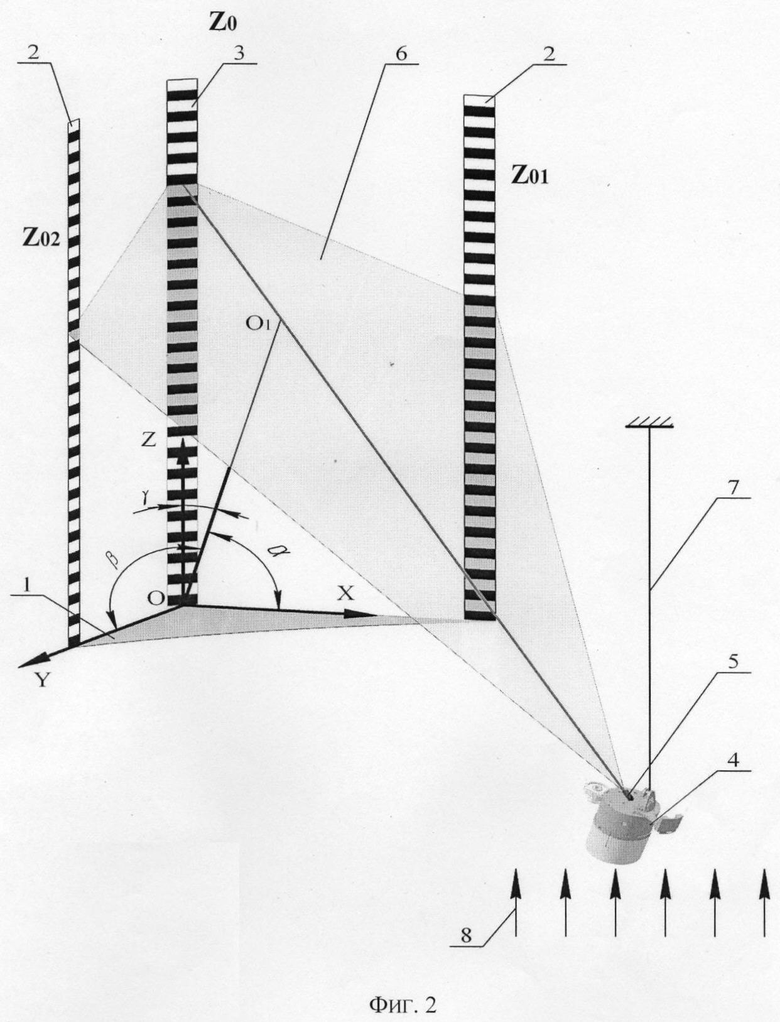
Способ поясняется чертежами, где на фиг.1 и 2 продемонстрирована реализация способа для двух разнородных летательных аппаратов: модели (1:10) самолета и боевого элемента кассетного снаряда. С тем же успехом способ может быть реализован и на модели вертолета. На чертежах показано как вне летательного аппарата (или его модели) создают опорную систему прямоугольных координат с началом в точке «0». Для этого на горизонтальной плоскости 1 на осях OX и OY устанавливают вертикальные измерительные стойки 2 таким образом, что их расстояния от начала координат (точка «0») равны. Третью стойку 3 устанавливают в начале координат и совмещают ее с вертикальной осью OZ. На стойках, как на измерительной линейке, нанесены (показано условно) деления.
На поверхности летательного аппарата (или его модели) 4, даже если она не содержит плоский участок, крепят плоскость, касательную к поверхности (на чертежах не показана), и на нее устанавливают источник лазерного излучения 5 (с плоскостью, касательной к поверхности летательного аппарата (или его модели), они составляют модуль). Лазерный луч (или его развертку) направляют параллельно плоскости, касательной к поверхности летательного аппарата (или его модели). Летательный аппарат (или его модель) закрепляют на вертикальной подвеске в точке, лежащей на его поверхности, с обеспечением перемещения его центра масс по трем степеням свободы и обдувают вертикальным потоком воздуха для придания вращения со стороны противоположной подвески. Это имитирует падение летательного аппарата (или его модели) (у самолета плоскость симметрии проходит по его продольной оси). Фиксируют координаты следов лазерного луча или его развертки на измерительных стойках, а угловое положение летательного аппарата (или его модели) определяют по величине углов (α, β, γ) между перпендикуляром, воображаемо опущенным из точки начала координат на плоскость, образованную разверткой лазерного луча или его перемещением, и осями опорной системы прямоугольных координат по формулам
 ;
;
 ;
;
 .
.
где α, β, γ - углы между перпендикуляром к касательной плоскости и осями OX, OY, OZ;
Z0 - координата следа лазерного излучения на измерительной стойке, совмещенной с вертикальной осью OZ;
Z1 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси ОХ;
Z2 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси OY;
L - расстояние между измерительными стойками относительно начала координат.
Расстояние L задается перед началом эксперимента.
Способ опробован на реальном летательном аппарате (фиг.2) в форме цилиндра (боевом элементе).
Для случая конкретной реализации определения углового положения летательного аппарата при его падении, летательный аппарат закрепляют в пространстве системы прямоугольных координат на вертикальной подвеске 7 с тремя степенями свободы в точках, лежащей на его поверхности (для цилиндра плоскостей симметрии множество, но все включают продольную ось). Источник лазерного излучения укрепляют на торце цилиндра в районе точки его подвески на плоскости, касательной к поверхности летательного аппарата. Лазерный луч или его развертку направляют параллельно плоскости, касательной к поверхности летательного аппарата. Летательный аппарат обдувают вертикальным потоком воздуха 8 для придания ему вращения, как это случается при падении в условиях реального полета. На измерительных стойках лазерный луч или его развертка образуют следы, которые фиксируются. Эти координаты определяют мгновенное положение плоскости, касательной к поверхности летательного аппарата. Разницей в расстоянии между виртуальной плоскостью, касательной к поверхности летательного аппарата, и плоскостью, образованной разверткой лазерного луча или его перемещением в процессе вращения, можно пренебречь. Вводя зафиксированные значения координат лазерного луча в математические зависимости, получаем значения углов (α, β, γ), определяющих угловое положение летательного аппарата.
В эксперименте высота стоек равнялась 1,5 м, их расстояние L от точки начала координат - 1 м. Цена деления измерительной шкалы 0,02 м. Скорость потока воздуха 20 м/сек. Эксперимент длился не менее 2-х минут. На измерительных стойках с помощью цифровой видеокамеры типа «Panasonic HXM2» с частотой 25 кадров в секунду записывают видеоизображения координат следов лазерного луча. Записанные изображения сохраняют в памяти компьютера для последующей обработки. Производят покадровую визуальную регистрацию координат следов лазерного луча на измерительных стойках с помощью программы 321 Video Converter и передают их в электронную таблицу программы «Ехсе1-97», с помощью которой определяют углы α, β, γ с погрешностью в пределах 0,5…0,7°.
Например, при L=1 м, Z0=0,26 м, Z1=0,58 м, Z2=0,31 м углы α, β, γ равны соответственно 72,3°, 87,3°0, 17,9° с погрешностью измерения не более 0,7°.
Достоинством метода является то, что он позволяет определять угловое положение летательного аппарата непосредственно и одномоментно по трем пространственным координатам, а не по двум, как это принято в проекционно-теневом методе. Это обстоятельство позволяет исключить погрешности, связанные с изготовлением модели и нахождением положения ее центра масс, что значительно снижает трудоемкость.
Для заявленного технического решения, как оно охарактеризовано в независимом пункте формулы, подтверждена возможность его осуществления с помощью описанных в заявке и известных средств и методов.
В свою очередь, заявленное изобретение способно обеспечить достижение усматриваемого заявителями технического результата, следовательно, оно соответствует критерию «промышленная применимость» действующего патентного законодательства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И НЕСТАЦИОНАРНЫХ АЭРОДИНАМИЧЕСКИХ ПРОИЗВОДНЫХ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531097C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2475863C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ЖЕЛЕЗНОДОРОЖНОГО КОЛЕСА | 2012 |
|
RU2500561C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ОТКЛОНЕНИЯ ОСИ ЛАЗЕРНОГО ПУЧКА ОТ НОМИНАЛЬНОГО ПОЛОЖЕНИЯ | 2011 |
|
RU2496098C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ СКВОЗНЫХ ОГНЕСТРЕЛЬНЫХ ПУЛЕВЫХ РАНЕВЫХ КАНАЛОВ ПРИ СУДЕБНО-МЕДИЦИНСКОЙ ЭКСПЕРТИЗЕ ТРУПОВ ПОСТРАДАВШИХ | 2009 |
|
RU2390308C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА) | 2011 |
|
RU2466355C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ НА БАЗЕ БОРТОВОГО РАДИОТЕПЛОЛОКАТОРА | 2008 |
|
RU2368918C1 |
| ОПТИЧЕСКАЯ СКАНИРУЮЩАЯ СИСТЕМА | 2009 |
|
RU2422864C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2015 |
|
RU2614467C1 |
Изобретение относится к области аэродинамических испытаний. Способ включает создание опорной системы прямоугольных координат с установкой на равном расстоянии от начала координат на двух горизонтальных ее осях ОХ и OY по одной измерительной стойке, а третью измерительную стойку совмещают с вертикальной осью OZ. На поверхности летательного аппарата (или его модели) закрепляют модуль источника лазерного излучения, оптическая ось которого параллельна плоскости, касательной к поверхности летательного аппарата (или его модели), или развертка лазерного луча параллельна указанной плоскости. Летательный аппарат (или его модель) закрепляют в точке, лежащей на его поверхности, с обеспечением перемещения его центра масс по трем степеням свободы и фиксируют координаты следов лазерного луча или его развертки на измерительных стойках, а угловое положение летательного аппарата (или его модели) определяют по величине углов (α, β, γ). Достигается расширение ассортимента технических средств указанного назначения с добавлением технических возможностей. 2 ил.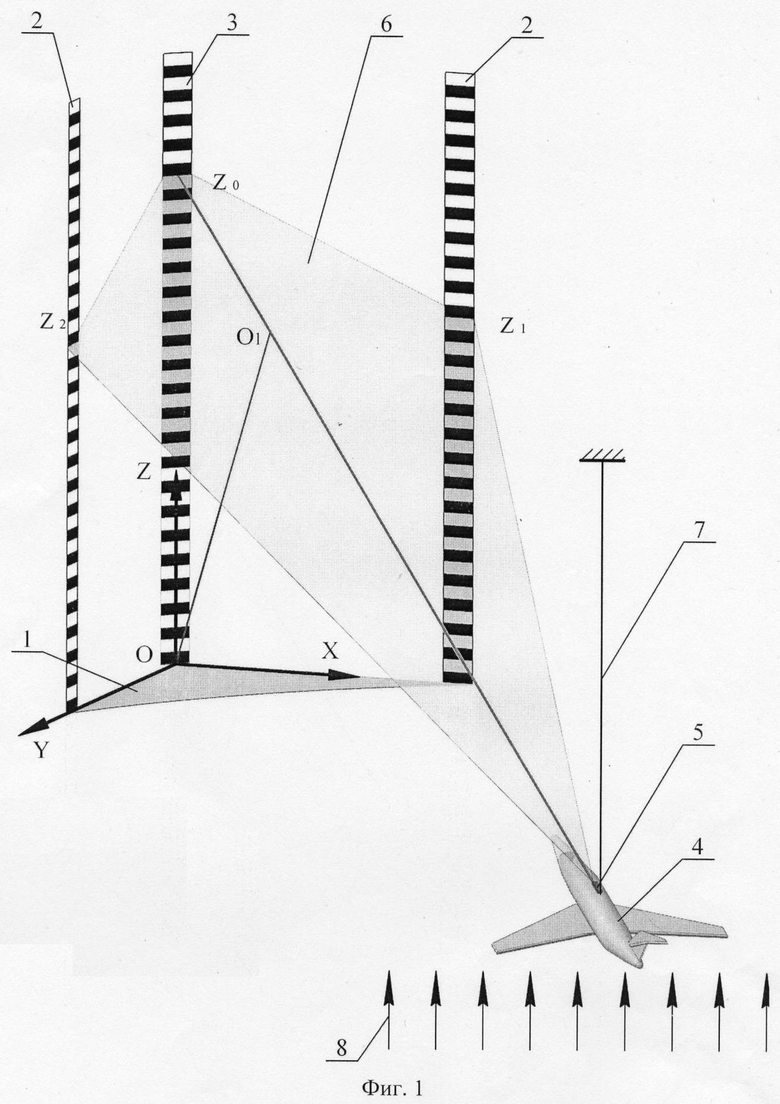
Способ определения углового положения летательного аппарата (или его модели) в пространстве, при котором летательный аппарат (или его модель) подвешивают на вертикальной подвеске и обдувают потоком воздуха, имитируя его падение, отличающийся тем, что вне летательного аппарата (или его модели) создают опорную систему прямоугольных координат, для чего на горизонтальных осях ОХ и OY устанавливают две вертикальные измерительные стойки, третью измерительную стойку совмещают с вертикальной осью OZ, на плоскости, касательной к поверхности летательного аппарата (или его модели), устанавливают источник лазерного излучения, луч которого или его развертку направляют параллельно плоскости, касательной к поверхности летательного аппарата (или его модели), летательный аппарат (или его модель) закрепляют в точке, лежащей на его поверхности, с обеспечением перемещения его центра масс по трем степеням свободы, и фиксируют координаты следов лазерного луча или его развертки на измерительных стойках, а угловое положение летательного аппарата (или его модели) определяют по величине углов (α, β, γ) между перпендикуляром, воображаемо опущенным из точки начала координат на плоскость, образованную разверткой лазерного луча или его перемещением при вращении летательного аппарата (или его модели), и осями опорной системы прямоугольных координат по формулам:
 ;
;
 ;
;
где α, β, γ - углы между перпендикуляром к касательной плоскости и осями OX, OY, OZ;
Z0 - координата следа лазерного излучения на измерительной стойке, совмещенной с вертикальной осью OZ;
Z1 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси ОХ;
Z2 - координата следа лазерного излучения на измерительной стойке, установленной на горизонтальной оси OY;
L - расстояние между измерительными стойками относительно начала координат.
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА И КООРДИНАТ САМОЛЕТА | 2007 |
|
RU2356012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| WO 200429540 A2, 08.04.2004 | |||
| Многослойное износостойкое покрытие на стальной подложке | 2020 |
|
RU2759163C1 |
| US 2005052635 A1, 10.03.2005. | |||

