Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2553709C1 |
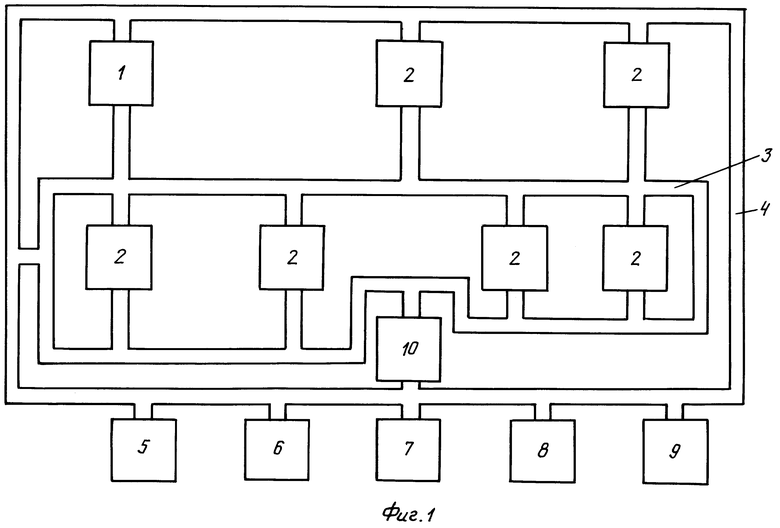
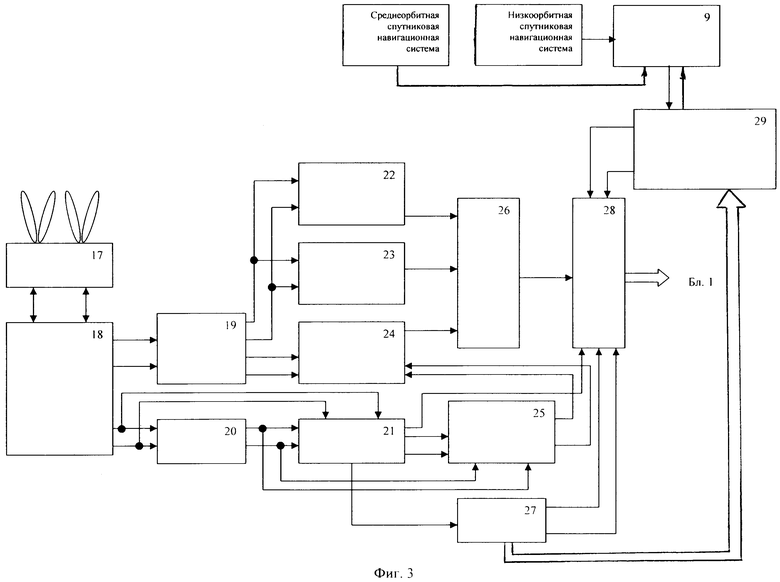
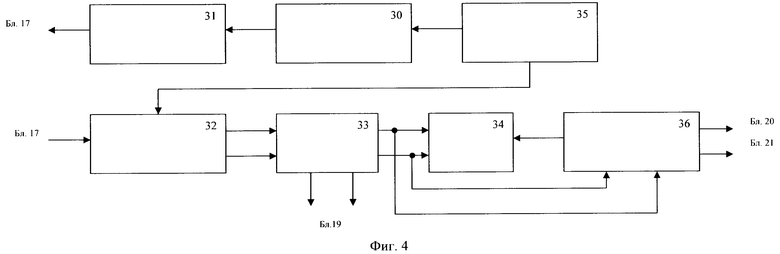

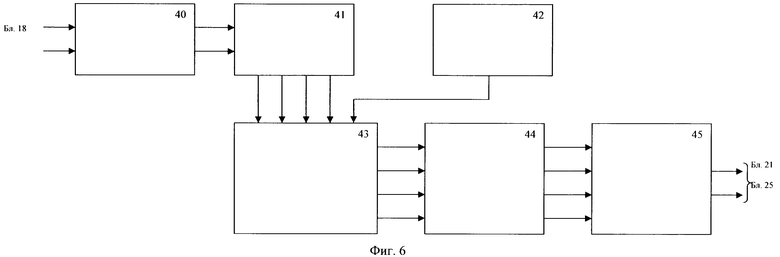
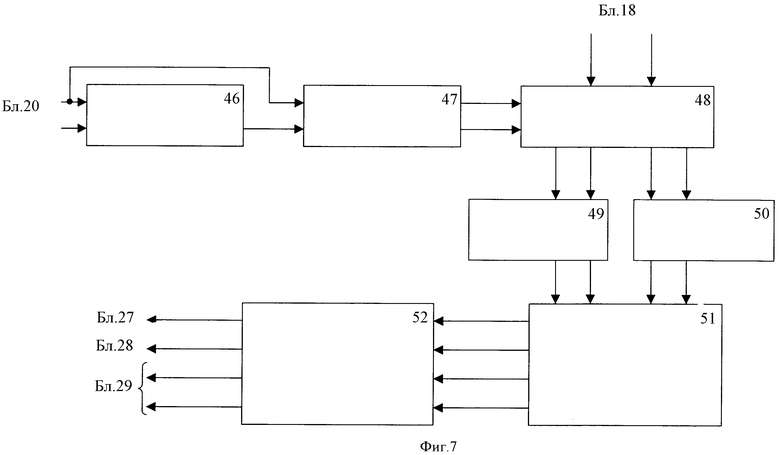
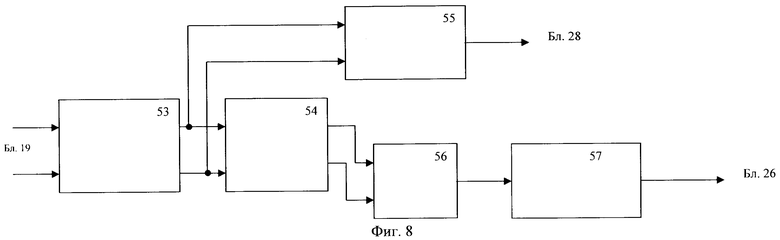
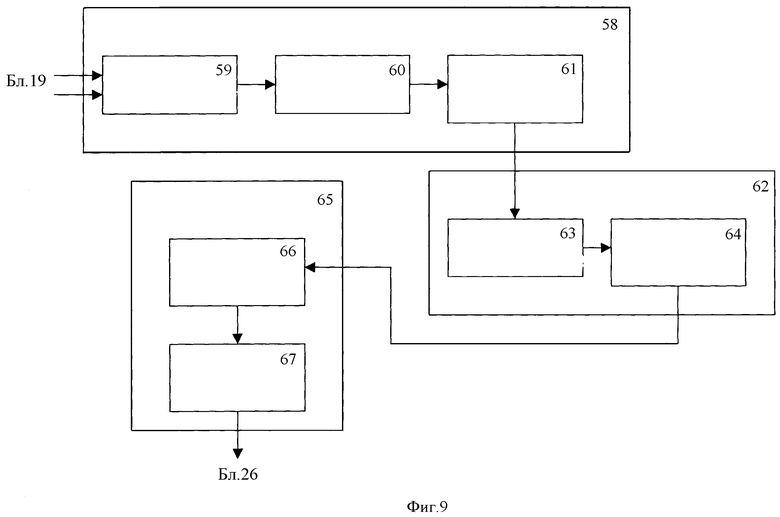
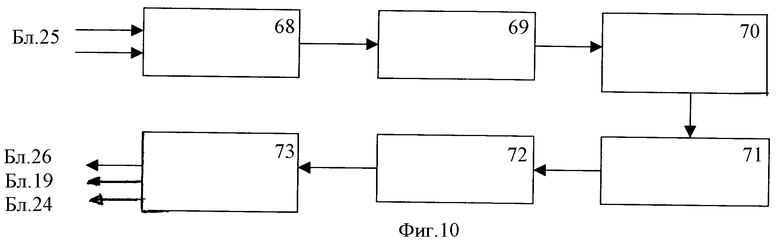
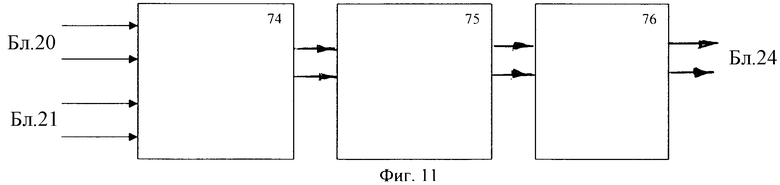
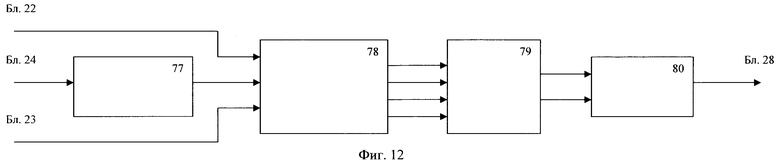
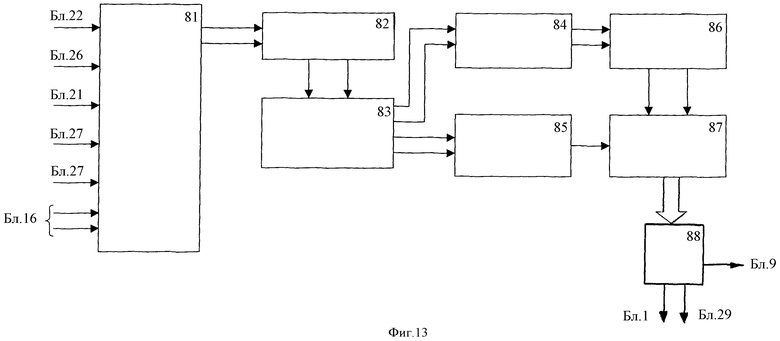
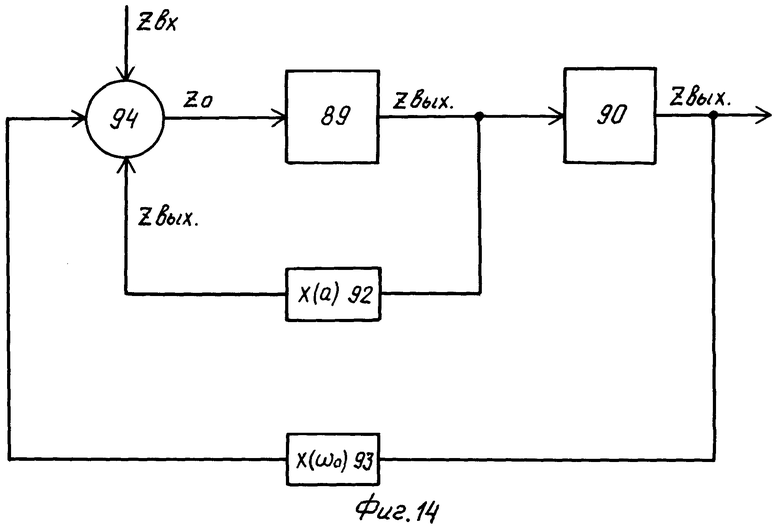
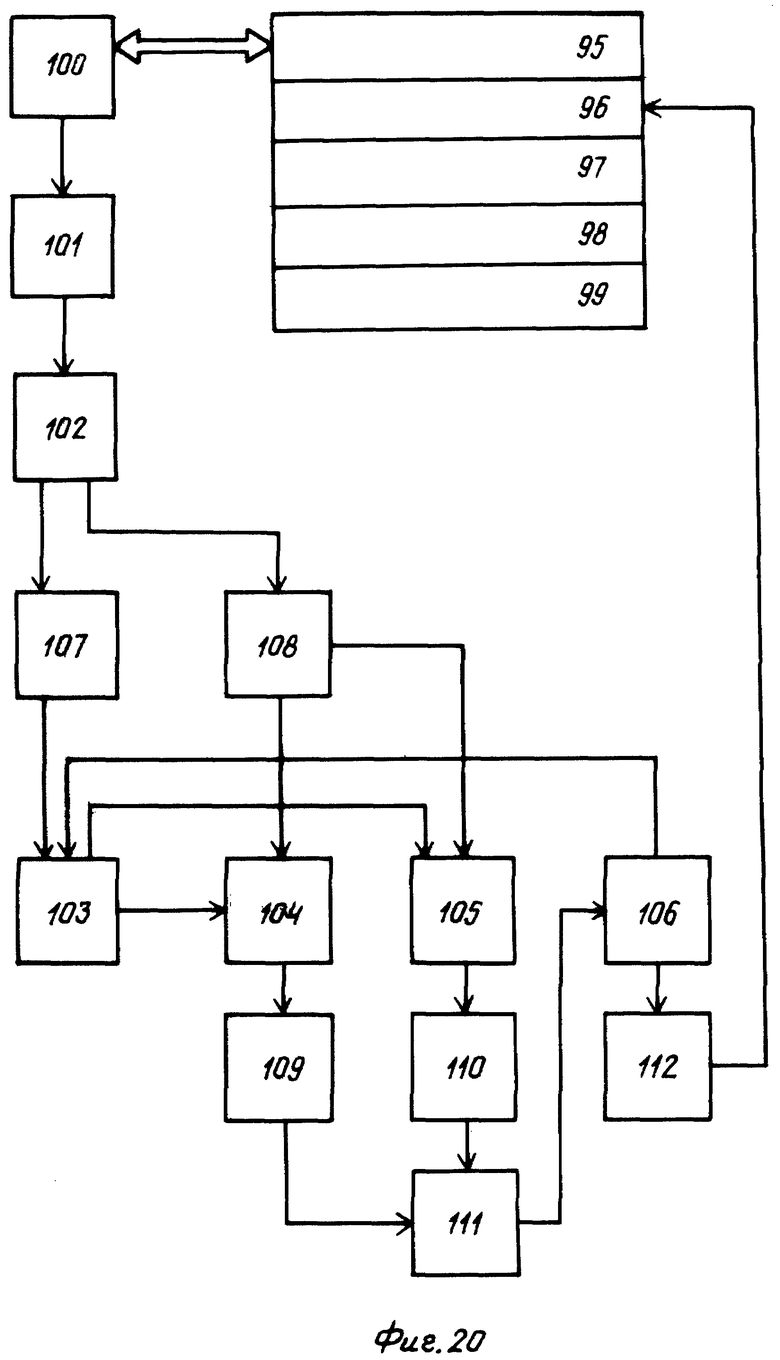
Изобретение относится к автоматической стабилизации судна. Система динамической стабилизации судна содержит центральный вычислитель, связанный с рулевыми приводами и с датчиками перегрузки, углового положения, угловых скоростей, автономными вычислителями, количество которых соответствует числу приводов, аналого-цифровые и цифроаналоговые преобразователи, информационно-измерительный модуль, микропроцессорный модуль, блок динамической коррекции, приемоиндикатор низкоорбитной и среднеорбитной спутниковой навигационной системы, α-БИХ фильтр. Указанные элементы системы динамической стабилизации судна соединены между собой через общую шину информационного обмена. Информационно-измерительный модуль содержит блок фазовых радиовысотомеров и двухкомпонентный акселерометр, образующие инерциальный модуль. Инерциальный модуль входит в состав радиовысотомеров и построен на базе гироазимутгоризонткомпаса и содержит датчики относительных угловых скоростей и акселерометры с взаимно ортогональными осями чувствительности. Обеспечивается уменьшение килевой, бортовой качки и динамических перегрузок, возникающих при движении судна. 21 ил.
Система динамической стабилизации судна, содержащая центральный вычислитель, связанный с рулевыми приводами и с датчиками перегрузки, углового положения, угловых скоростей, автономными вычислителями, количество которых соответствует числу приводов, аналого-цифровые и цифроаналоговые преобразователи, внешнюю и внутреннюю шины обмена информацией, отличающаяся тем, что дополнительно введены информационно-измерительный модуль, включающий блок фазовых радиовысотомеров, двухкомпонентный акселерометр, образующие инерциальный модуль, который входит в состав радиовысотомеров, и построенный на базе гироазимутгоризонткомпаса и включающий датчики относительных угловых скоростей и акселерометры с взаимноортогональными осями чувствительности, микропроцессорный модуль, выполненный в виде функционального устройства, блок динамической коррекции, выполненный в виде автоматического корреляционного устройства, приемоиндикатор низкоорбитной и среднеорбитной спутниковой навигационной системы, α-БИХ фильтр, соединенные между собой и другими элементами системы динамической стабилизации судна через общую шину информационного обмена.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ НА ПОДВОДНЫХ КРЫЛЬЯХ | 1994 |
|
RU2081780C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |

