Заявляемый способ относится к области технических измерений и может быть использован при измерении отклонений формы оболочки вращения от номинальной поверхности, например, при измерении отклонений от круглости, цилиндричности, произвольной поверхности вращения и профиля продольного сечения, радиального и полного радиального биений преимущественно крупногабаритных корпусных изделий.
Известен способ разностного измерения отклонения от круглости, заключающийся в том, что устанавливают изделие, осуществляют его вращение относительно измерительного датчика и фиксируют получающийся эксцентриситет и начальную фазу гармоники первого порядка ряда Фурье, создают систему координат, соответствующую минимальной методической погрешности, определяют значение погрешности формы изделия в этой системе координат (пат. 2239785 РФ, МПК G01B 5/20, G01B 5/08, опубл. 10.11.2004).
Данный способ имеет следующие недостатки: невозможность определения отклонений формы изделия от произвольных поверхностей и профилей, отличных от круга; невозможность измерения геометрических параметров крупногабаритных, радиус которых больше 1000 мм, пустотелых изделий ввиду значительности влияния деформации их корпуса в процессе вращения относительно неподвижного измерительного преобразователя на результат измерения.
Наиболее близким по совокупности признаков к заявляемому способу является способ измерения отклонений формы оболочки вращения, заключающийся в том, что измеряют радиус-векторы ρ(θi) контура первоначального сечения и вычисляют начальные отклонения формы w0i как разность между векторами ρ(θi) и номинальным радиусом оболочки r, одновременно в точках контроля i измеряют первоначальные значения кривизны оболочки при помощи, например, датчика для измерения кривизны, снабженного шаровыми опорами, которые устанавливают на ребрах жесткости оболочки в кернах, заранее накерненных тройках точек, каждая средняя точка из которых совпадает с контрольной точкой, снимают начальные показания углов Δαi, по которым определяют начальные значения кривизны K0i, по формуле  , где b - расстояние между соседними накерненными точками в каждой тройке точек, затем после изменения внутренних и внешних нагрузок при помощи того же прибора и в тех же контрольных точках снимают текущие показания углов Δαi, вычисляют текущие значения кривизны Ki и определяют изменение значений кривизны ki как разность между текущими и начальными значениями кривизны ki=Ki-K0i, по изменениям значений кривизны вычисляют возникающие отклонения формы по следующей зависимости:
, где b - расстояние между соседними накерненными точками в каждой тройке точек, затем после изменения внутренних и внешних нагрузок при помощи того же прибора и в тех же контрольных точках снимают текущие показания углов Δαi, вычисляют текущие значения кривизны Ki и определяют изменение значений кривизны ki как разность между текущими и начальными значениями кривизны ki=Ki-K0i, по изменениям значений кривизны вычисляют возникающие отклонения формы по следующей зависимости:  , где θ - текущий радиальный угол; k(θ) определяется интерполированием или аппроксимацией по дискретным значениям ki=Ki-K0i, полученные значения отклонения формы суммируются с начальными значениями отклонений формы (пат. 2242707 РФ, МПК G01B 5/08, G01B 5/20, опубл. 20.12.2004).
, где θ - текущий радиальный угол; k(θ) определяется интерполированием или аппроксимацией по дискретным значениям ki=Ki-K0i, полученные значения отклонения формы суммируются с начальными значениями отклонений формы (пат. 2242707 РФ, МПК G01B 5/08, G01B 5/20, опубл. 20.12.2004).
Данный способ имеет недостаток: невозможность определения пространственных отклонений формы изделия от произвольных базовых поверхностей.
Задачей заявляемого изобретения является расширение функциональных возможностей средств измерения.
Технический результат: расширение функциональности средств измерения посредством добавления возможности измерения пространственных отклонений формы и дополнительных геометрических параметров: радиального биения и полного радиального биения.
Указанный технический результат достигается тем, что предварительно создают основную цилиндрическую систему координат (ρ, θ, z) в горизонтально расположенной оболочке вращения путем задания начала отсчета в середине отрезка, материализуемого, например, с помощью струны, соединяющего наивысшую точку внутренней поверхности одного из торцов оболочки и точку пересечения вертикальной прямой, опущенной, например, с помощью отвеса, из соответствующей наивысшей точки, с внутренней поверхностью оболочки, полярной оси, совпадающей с лучом, проведенным из начала отсчета вдоль проходящей через него вертикальной прямой по направлению к наивысшей точке внутренней поверхности соответствующего торца оболочки, оси аппликат, совпадающей с лучом, проведенным из начала отсчета по направлению к середине отрезка, соединяющего наивысшую точку внутренней поверхности другого торца оболочки и точку пересечения вертикальной прямой, опущенной из соответствующей наивысшей точки, с внутренней поверхностью оболочки, вдоль прямой, соединяющей начало отсчета и середину соответствующего отрезка, создают вспомогательную цилиндрическую систему координат (r, φ, z) путем параллельного переноса основной системы в плоскости, содержащей ее ось аппликат и полярную ось, так, что начало отсчета вспомогательной системы располагается на прямой, содержащей полярную ось основной системы, на расстояние е от начала отсчета основной системы, измеряют радиус-векторы r(φi, zj) контуров сечений во вспомогательной цилиндрической системе координат в основных плоскостях с координатами zj, zj∈[0,Z], где Z - длина оболочки вращения по оси аппликат, измеряют радиус-векторы ρ(θi, zj) контуров сечений в основной цилиндрической системе координат косвенно по следующей зависимости:  , где φi - текущий фазовый угол в интервале от 0 до 2π радиан,
, где φi - текущий фазовый угол в интервале от 0 до 2π радиан,  - текущий радиальный угол в интервале от 0 до 2π радиан, вычисляют отклонения формы по следующей зависимости:
- текущий радиальный угол в интервале от 0 до 2π радиан, вычисляют отклонения формы по следующей зависимости:  , где ρ0(zj) - номинальный радиус средней окружности, дополнительно в основной плоскости с аппликатой zj вычисляют радиальное биение по следующей зависимости:
, где ρ0(zj) - номинальный радиус средней окружности, дополнительно в основной плоскости с аппликатой zj вычисляют радиальное биение по следующей зависимости:  , в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:
, в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:  .
.
Создаваемая основная цилиндрическая система координат (ρ, θ, z) является пространственной. Привязка ее к оболочке вращения, то есть задание начала отсчета в середине отрезка, соединяющего наивысшую точку внутренней поверхности одного из торцов горизонтально расположенной оболочки вращения и точку пересечения вертикальной прямой, опущенной из соответствующей наивысшей точки, с внутренней поверхностью оболочки, полярной оси, совпадающей с лучом, проведенным из начала отсчета вдоль проходящей через него вертикальной прямой по направлению к наивысшей точке внутренней поверхности соответствующего торца оболочки, оси аппликат, совпадающей с лучом, проведенным из начала отсчета по направлению к середине отрезка, соединяющего наивысшую точку внутренней поверхности другого торца оболочки и точку пересечения вертикальной прямой, опущенной из соответствующей наивысшей точки, с внутренней поверхностью оболочки, вдоль прямой, соединяющей начало отсчета и середину соответствующего отрезка, позволяет однозначно задать положение любой точки внутренней поверхности оболочки вращения в пространстве, что является необходимым для достижения технического результата.
Существует сложность технической реализации предназначенных для измерения крупногабаритных оболочек вращения средств измерения, которые работают в основной цилиндрической системе координат (ρ, θ, z), ввиду соизмеримости габаритов средства измерения и оболочки вращения, что вызывает усложнение его конструкции и необходимость разработки дополнительных мер коррекции влияния температуры на результат измерения. Очевидно, что при измерении геометрических параметров крупногабаритных оболочек вращения создание вспомогательной цилиндрической системы координат (r, φ, z) путем параллельного переноса основной системы в плоскости, содержащей ее ось аппликат и полярную ось, так, что начало отсчета вспомогательной системы располагается на прямой, содержащей полярную ось основной системы, на расстоянии е от начала отсчета основной системы, является необходимым для достижения технического результата.
Для измерения пространственных отклонений формы необходимо определить положение всех точек поверхности оболочки вращения, задающих форму последней, в пределах нормируемого участка в пространственной системе координат, пересчитать координаты полученных точек к системе координат, в которой задана номинальная оболочка вращения, относительно которой рассчитывается отклонение формы. Поэтому измерение радиус-векторов r(φi, zj) контуров сечений во вспомогательной цилиндрической системе координат в основных плоскостях с координатами zj, zj∈[0,Z], где Z - длина оболочки вращения по оси аппликат, измерение радиус-векторов ρ(θi, zj) контуров сечений в основной цилиндрической системе координат косвенно и вычисление отклонения формы являются необходимыми для достижения технического результата.
К геометрическим параметрам, по которым производится анализ технологических процессов изготовления оболочек вращения, кроме отклонения формы относятся также радиальное биение и полное радиальное биение, поэтому дополнительное вычисление в основной плоскости с аппликатой zj радиального биения и вычисление в пределах нормируемого участка полного радиального биения является необходимым для достижения технического результата.
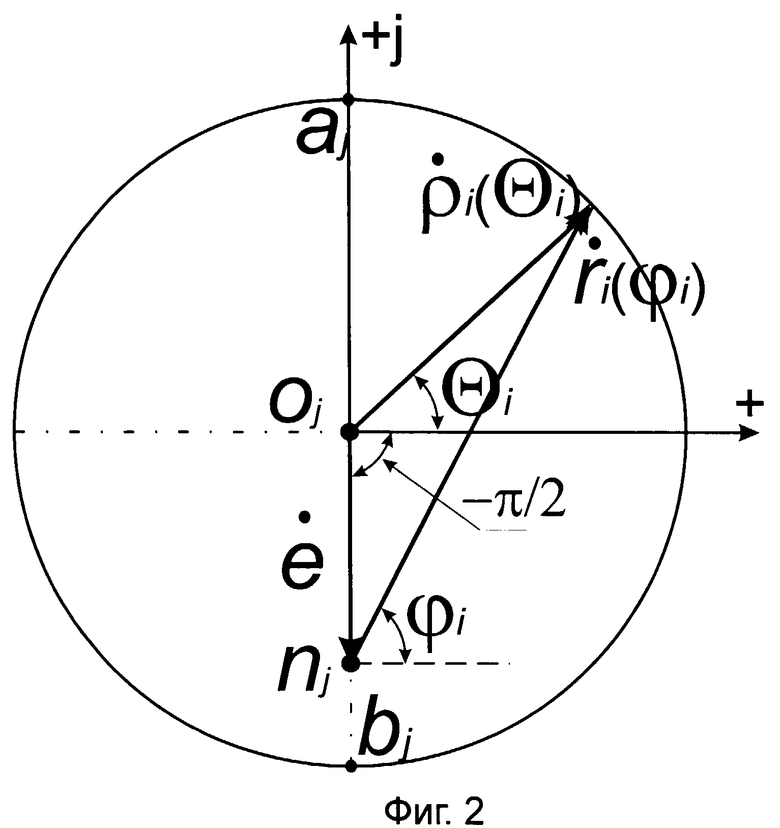
Заявляемый способ поясняется чертежами, где на фиг.1 показана схема измерения геометрических параметров оболочки вращения во вспомогательной цилиндрической системе координат, на фиг.2 - схема косвенного измерения геометрических параметров оболочки вращения в текущей основной плоскости основной цилиндрический системы координат.
Заявляемый способ осуществляется следующим образом.
Предварительно создают основную цилиндрическую систему координат (ρ, θ, z) в горизонтально расположенной оболочке вращения путем задания начала отсчета о1 (фиг.1) в середине отрезка a
1-b1, материализуемого, например, с помощью струны, соединяющего наивысшую точку a1 внутренней поверхности одного из торцов оболочки и точку b1 пересечения вертикальной прямой, опущенной, например, с помощью отвеса, из соответствующей наивысшей точки a
1, с внутренней поверхностью оболочки, полярной оси o1-a
1, совпадающей с лучом, проведенным из начала отсчета о1 вдоль проходящей через него вертикальной прямой a
1-b1 по направлению к наивысшей точке a
1 внутренней поверхности соответствующего торца оболочки, оси аппликат o1-о2, совпадающей с лучом, проведенным из начала отсчета о1 по направлению к середине отрезка о2, соединяющего наивысшую точку а
2 внутренней поверхности другого торца оболочки и точку b2 пересечения вертикальной прямой a
2-b2, опущенной из соответствующей наивысшей точки a
2, с внутренней поверхностью оболочки, вдоль прямой о1-o2, соединяющей начало отсчета о1 и середину о2 соответствующего отрезка, создают вспомогательную цилиндрическую систему координат (r, φ, z) путем параллельного переноса основной системы (ρ, θ, z) в плоскости, содержащей ее ось аппликат o1-o2 и полярную ось o1-a
1, так, что начало отсчета n2 вспомогательной системы располагается на прямой a
1-b1, содержащей полярную ось a
1-b1 основной системы, на расстоянии e от начала отсчета о1 основной системы, измеряют радиус-векторы r(φi,zj) контуров сечений во вспомогательной цилиндрической системе координат в основных плоскостях с координатами zj, zj∈[0,Z], где Z - длина оболочки вращения по оси аппликат, измеряют радиус-векторы ρ(θi, zj) контуров сечений в основной цилиндрической системе координат косвенно. Для выявления аналитической зависимости между радиус-векторами основной ρ(θi,zj) и вспомогательной r(φi,zj) цилиндрических систем координат, фазовыми φi и центральными θi углами составим векторное уравнение на комплексной плоскости (фиг.2)  , осуществим переход к тригонометрической форме записи, используя формулы Эйлера:
, осуществим переход к тригонометрической форме записи, используя формулы Эйлера:  , после преобразования получаем:
, после преобразования получаем:
 , откуда
, откуда  подставим в первое уравнение системы (1), имеем радиус-вектор в основной цилиндрической системе координат
подставим в первое уравнение системы (1), имеем радиус-вектор в основной цилиндрической системе координат  , а текущий радиальный угол
, а текущий радиальный угол  изменяется в интервале от 0 до 2 л радиан аналогично фазовому углу. Отклонения формы в общем виде вычисляют по следующей зависимости:
изменяется в интервале от 0 до 2 л радиан аналогично фазовому углу. Отклонения формы в общем виде вычисляют по следующей зависимости:  , где ρ0(zj) - номинальный радиус средней окружности, в основной плоскости с аппликатой zj, частные случаи отклонения формы вычисляют по следующим зависимостям: отклонение формы оболочки вращения от круглости
, где ρ0(zj) - номинальный радиус средней окружности, в основной плоскости с аппликатой zj, частные случаи отклонения формы вычисляют по следующим зависимостям: отклонение формы оболочки вращения от круглости  в пределах нормируемого участка [zm,zn] или в предельном случае zj∈[0,Z], от цилиндричности
в пределах нормируемого участка [zm,zn] или в предельном случае zj∈[0,Z], от цилиндричности  от номинального профиля продольного сечения в плоскости, проходящей через ось аппликат z при заданном радиальном угле θi
от номинального профиля продольного сечения в плоскости, проходящей через ось аппликат z при заданном радиальном угле θi  кроме отклонений формы дополнительно вычисляют и другие геометрические параметры оболочки вращения: вычисляют радиальное биение по следующей зависимости:
кроме отклонений формы дополнительно вычисляют и другие геометрические параметры оболочки вращения: вычисляют радиальное биение по следующей зависимости:  , в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:
, в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:  .
.
Таким образом, заявляемый способ измерения геометрических параметров оболочки вращения позволяет расширить функциональность средств измерения посредством добавления возможности измерения пространственных отклонений формы и дополнительных геометрических параметров: радиального биения и полного радиального биения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ФОРМЫ ОБОЛОЧКИ ВРАЩЕНИЯ | 2003 |
|
RU2242707C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ТОЧНОСТИ ТОРЦЕВЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ ТИПА "ТЕЛО ВРАЩЕНИЯ" | 2011 |
|
RU2471145C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| Способ косвенного измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2019 |
|
RU2729512C1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2013 |
|
RU2562149C2 |
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1999 |
|
RU2168146C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАЗРЕШЕНИЯ НА МЕСТНОСТИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 1996 |
|
RU2144654C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
Изобретение относится к области технических измерений и может быть использовано при измерении геометрических параметров (отклонений формы и биений) преимущественно крупногабаритных корпусных изделий. Способ заключается в том, что предварительно создают основную (ρ, θ, z) и вспомогательную (r, φ, z) цилиндрические системы координат, измеряют радиус-векторы r(φi, zj) контуров сечений, измеряют радиус-векторы ρ(θi, zj) контуров сечений косвенно: , где φi - текущий фазовый,  - радиальный угол, вычисляют отклонения формы: , где ρ0(zj) - номинальный радиус средней окружности, дополнительно вычисляют радиальное биение и полное радиальное биение. Техническим результатом изобретения является расширение функциональности средств измерения. 2 ил.
- радиальный угол, вычисляют отклонения формы: , где ρ0(zj) - номинальный радиус средней окружности, дополнительно вычисляют радиальное биение и полное радиальное биение. Техническим результатом изобретения является расширение функциональности средств измерения. 2 ил.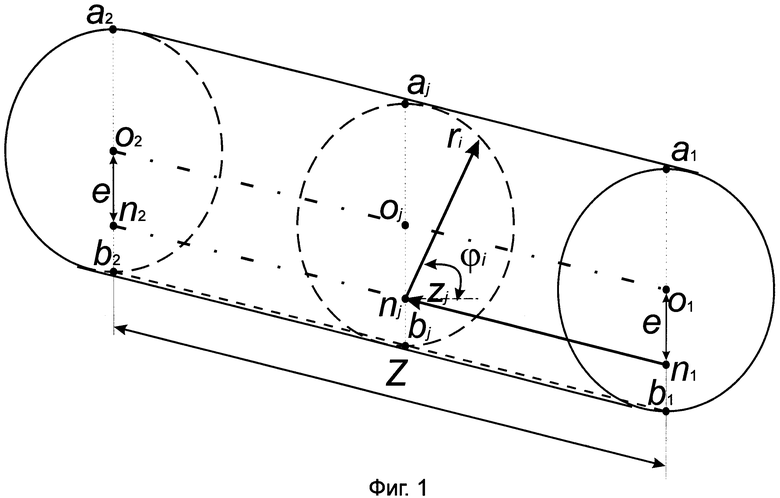
Способ измерения геометрических параметров оболочки вращения, заключающийся в том, что измеряют радиус-векторы контура сечения и вычисляют отклонения формы оболочки вращения как разность между радиус-векторами и номинальным радиусом оболочки, отличающийся тем, что предварительно создают основную цилиндрическую систему координат (ρ, θ, z) в горизонтально расположенной оболочке вращения путем задания начала отсчета в середине отрезка, материализуемого, например, с помощью струны, соединяющего наивысшую точку внутренней поверхности одного из торцов оболочки и точку пересечения вертикальной прямой, опущенной, например, с помощью отвеса из соответствующей наивысшей точки, с внутренней поверхностью оболочки, полярной оси, совпадающей с лучом, проведенным из начала отсчета вдоль проходящей через него вертикальной прямой по направлению к наивысшей точке внутренней поверхности соответствующего торца оболочки, оси аппликат, совпадающей с лучом, проведенным из начала отсчета по направлению к середине отрезка, соединяющего наивысшую точку внутренней поверхности другого торца оболочки и точку пересечения вертикальной прямой, опущенной из соответствующей наивысшей точки, с внутренней поверхностью оболочки, вдоль прямой, соединяющей начало отсчета и середину соответствующего отрезка, создают вспомогательную цилиндрическую систему координат (r, φ, z) путем параллельного переноса основной системы (ρ, θ, z) в плоскости, содержащей ее ось аппликат и полярную ось, так что начало отсчета вспомогательной системы располагается на прямой, содержащей полярную ось основной системы, на расстоянии е от начала отсчета основной системы, измеряют радиус-векторы r(φi, zj) контуров сечений во вспомогательной цилиндрической системе координат в основных плоскостях с координатами zj, zj∈[0,Z], где Z - длина оболочки вращения по оси аппликат, измеряют радиус-векторы ρ(θi, zj) контуров сечений в основной цилиндрической системе координат косвенно по следующей зависимости:  ,
,
где φi - текущий фазовый угол в интервале от 0 до 2π радиан,  - текущий радиальный угол в интервале от 0 до 2π радиан, вычисляют отклонения формы по следующей зависимости:
- текущий радиальный угол в интервале от 0 до 2π радиан, вычисляют отклонения формы по следующей зависимости:  ,
,
где ρ0(zj) - номинальный радиус средней окружности, дополнительно в основной плоскости с аппликатой zj вычисляют радиальное биение по следующей зависимости:  , в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:
, в пределах нормируемого участка вычисляют полное радиальное биение по следующей зависимости:  .
.
| СПОСОБ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ФОРМЫ ОБОЛОЧКИ ВРАЩЕНИЯ | 2003 |
|
RU2242707C1 |
| СПОСОБ РАЗНОСТНОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ КРУГЛОСТИ | 2002 |
|
RU2239785C2 |
| СПОСОБ КОНТРОЛЯ ФОРМЫ И ДИАМЕТРОВ ВНУТРЕННИХ СЕЧЕНИЙ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2000 |
|
RU2166729C1 |
| RU 2052763 C1, 20.01.1996 | |||
| Способ измерения отклонений от круглости | 1989 |
|
SU1643926A1 |
| Способ измерения диаметров цилиндрических поверхностей деталей | 1986 |
|
SU1612203A1 |
| Способ контроля формы сечения трубы | 1989 |
|
SU1675654A1 |

