Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления для электродвигателя, в котором предусмотрен ротор, имеющий постоянный магнит, и статор, предназначенный для генерирования вращающегося магнитного поля в результате приложения напряжения, и вращающий ротор.
Уровень техники
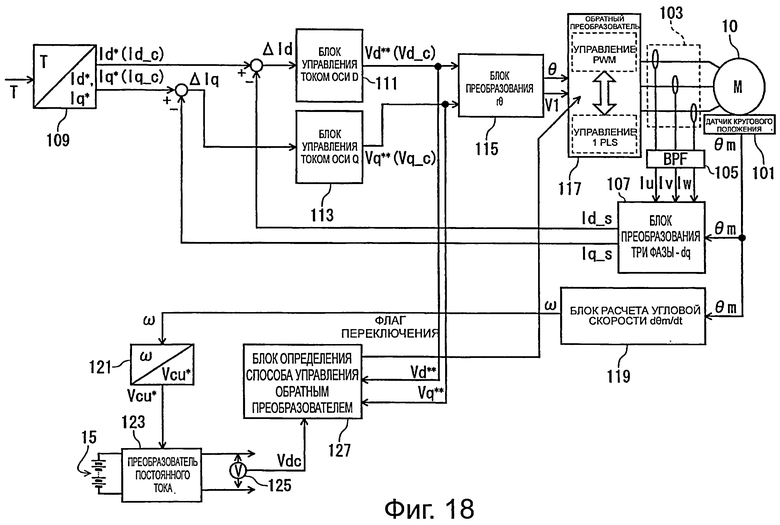
На фиг.18 показана блок-схема, представляющая устройство управления для электродвигателя, в соответствии с предшествующим уровнем техники настоящего изобретения. Устройство управления для электродвигателя 10, показанное на фиг.18, имеет датчик 101 кругового положения, датчик 103 тока, полосовой фильтр (BPF) 105, блок 107 преобразования три фазы - dq, блок 109 расчета команды тока, блок 111 управления током по оси d, блок 113 управления током по оси q, блок 115 преобразования rθ, обратный преобразователь (INV) 117, блок 119 расчета угловой скорости, блок 121 генерирования команды постоянного напряжения, преобразователь 123 постоянного тока, блок 125 детектирования выходного напряжения и блок 127 детектирования способа управления обратным преобразователем. В электродвигателе 10, показанном на фиг.18, электроэнергию подают с конденсатора 15 через устройство управления. Здесь электродвигатель 10 представляет собой, например, трехфазный бесщеточный электродвигатель постоянного тока, в котором предусмотрен ротор, имеющий постоянный магнит, и статор для генерирования вращающегося магнитного поля в результате приложения трехфазного напряжения и, таким образом, вращающий ротор.
Датчик 101 кругового положения детектирует механический угол ротора электродвигателя 10 и выводит электрический угол θm, соответствующий детектированному механическому углу. Электрический угол θm, выводимый из датчика 101 кругового положения, передают в блок 107 преобразования три фазы - dq и в блок 119 расчета угловой скорости. Датчик 103 тока детектирует ток каждой фазы трехфазных токов, выводимых из обратного преобразователя 117 и подаваемых в статор электродвигателя 10.
BPF 105 удаляет ненужные компоненты в сигналах детектирования тока, обозначающие трехфазные переменные токи Iu, Iv и Iw, детектируемые датчиком 103 тока. Блок 107 преобразования три фазы - dq выполняет преобразование три фазы - dq на основе сигналов детектирования тока, в которых ненужные компоненты были удалены с помощью BPF 105, и электрического угла θm ротора, детектируемого датчиком 101 кругового положения, для расчета детектированного значения Id_s тока по оси d и детектированного значения Iq_s тока по оси q.
На основе значения Т команды крутящего момента, вводимой извне, блок 109 расчета команды тока определяет значение Id* команды для тока ("ниже называется током оси d"), который подают в статор ("ниже называется статором по оси d") на стороне оси d, и значение Iq* команды для тока ("ниже называется током оси q"), подаваемым в статор ("ниже называется статором по оси q") на стороне оси q. Значение Id* команды для тока оси d вводят в блок 111 управления током по оси d. Кроме того, значение Iq* команды для тока оси q вводят в блок 113 управления током оси q. Здесь ось d представляет собой ось поля, и ось q представляет собой ось момента.
Блок 111 управления током оси d определяет значение Vd** команды для напряжения между выводами ("ниже называется напряжением оси d") статора оси d таким образом, что отклонение ΔId между значением Id* команды и детектируемым значением Id_s для тока по оси d должно уменьшаться. Блок 113 управления током оси q определяет значение Vq** команды для напряжения между выводами ("ниже называется напряжением оси q") статора по оси q таким образом, что отклонение ΔIq между значением Iq* команды и детектированным значением Iq_s для тока оси q должно уменьшаться. Значение Vd** команды для напряжения оси d и значение Vq** команды для напряжения оси q вводят в блок 115 преобразования rθ и в блок 127 определения способа управления обратным преобразователем.
Блок 115 преобразования rθ преобразует значение Vd** команды для напряжения оси d и значение Vq** команды для напряжения оси q в компоненты уровня VI напряжения и угла θ.
На основе компонентов уровня VI напряжения и угла θ, подаваемых из блока 115 преобразования rθ, обратный преобразователь 117 преобразует постоянное напряжение с конденсатора 15 через преобразователь 123 постоянного тока в переменные напряжения трех фаз (U, V, W). Здесь обратный преобразователь 117 представляет собой обратный преобразователь с прямоугольной волной и выполняет управление PWM (широтно-импульсная модуляция) или, в качестве альтернативы, управление одним импульсом (1 PLS) в зависимости от флага переключения, введенного из блока 127 определения способа управления обратным преобразователем. Здесь, при управлении PWM, более высокая частота переключения позволяет осуществлять управление выходным напряжением обратного преобразователя 117 с более высокой точностью. С другой стороны, при управлении 1 PLS, частота переключения является низкой, и, следовательно, потери переключения будут малыми.
Блок 119 расчета угловой скорости выполняет дифференцирование по времени электрического угла θm, выводимого из датчика 101 кругового положения, для расчета угловой скорости ω ротора электродвигателя 10. Угловую скорость ω, рассчитанную блоком 119 расчета угловой скорости, вводят в блок 121 генерирования команды постоянного напряжения.
Блок 121 генерирования команды постоянного напряжения обращается к таблице, описывающей соответствие между угловой скоростью ω и командой Vcu* выходного напряжения, и, таким образом, генерирует команду Vcu* выходного напряжения для передачи инструкции в преобразователь 123 постоянного тока для ввода фиксированного постоянного напряжения, соответствующего угловой скорости ω, введенной из блока 119 расчета угловой скорости. Команду Vcu* выходного напряжения подают в преобразователь 123 постоянного тока. Преобразователь 123 постоянного тока повышает или понижает выходное постоянное напряжение на конденсаторе 15 в исходной форме постоянного тока. Блок 125 детектирования выходного напряжения детектирует выходное напряжение Vdc преобразователя 123 постоянного тока.
На основе выходного напряжения Vdc преобразователя 123 постоянного тока, а также на основе значения Vd** команды для напряжения оси d, выводимого из блока 111 управления током оси d, и значения Vq** команды для напряжения оси q, выводимого из блока 113 управления током по оси q, блок 127 определения способа управления обратным преобразователем определяет флаг переключения, который должен быть введен в обратный преобразователь 117.
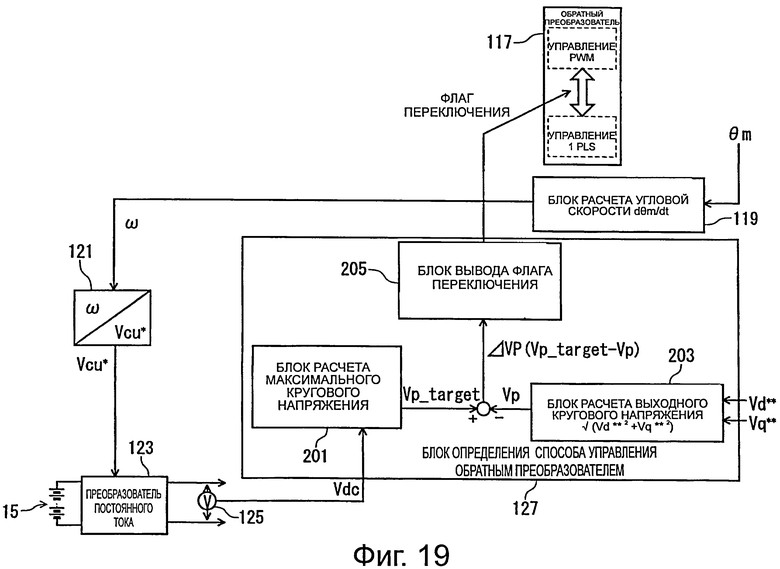
На фиг.19 показана блок-схема, представляющая внутреннюю конфигурацию блока 127 определения способа управления обратным преобразователем и взаимосвязь с компонентами, связанными с этим. Как показано на фиг.19, блок 127 определения способа управления обратным преобразователем имеет блок 201 расчета максимального кругового напряжения, блок 203 расчета выходного кругового напряжения и блок 205 вывода флага переключения. Блок 201 расчета максимального кругового напряжения получает значение Vp_target (Vdc/√6), получаемое путем деления на √6 выходного напряжения Vdc преобразователя 123 постоянного тока. Такое значение Vp_target представляет собой максимум напряжения фазы, которое разрешено прикладывать к электродвигателю 10, то есть значение напряжения фазы, прикладываемое к электродвигателю 10 в состоянии, когда коэффициент заполнения в обратном преобразователе 117 составляет 100%.
Блок 203 расчета выходного кругового напряжения выводит результат расчета √(Vd**2+Vq**2) как получаемый в результате вектор напряжения Vp. Блок 205 вывода флага переключения выводит флаг переключения, соответствующий разности ΔVp (=Vp_target-Vp) между значением Vp_target, выведенным блоком 201 расчета максимального кругового напряжения и получаемым в результате вектора напряжения Vp, выводимого блоком 203 расчета выходного кругового напряжения. Когда разность ΔVp больше, чем 0 (ΔVp>0), выходной блок 205 флага переключения выводит флаг переключения, определяющий управление PWM, и когда разность ΔVp меньше или равна 0 (ΔVp≤0), выводит флаг, определяющий управление 1 PLS.
Документы предшествующего уровня техники
Патентный документ
Патентный документ 1: Публикация №2005-51894 выложенного японского патента
Раскрытие изобретения
Задача, решаемая изобретением
В блоке управления для электродвигателя 10, описанном выше, преобразователем 123 постоянного тока управляют таким образом, чтобы он выводил фиксированное постоянное напряжение, соответствующее угловой скорости ω ротора электродвигателя 10. Кроме того, обратный преобразователь 117 выполняет управление PWM, когда разность ΔVp(=Vp_target-Vp), выведенная блоком 127 определения способа управления обратным преобразователем, больше чем ноль (ΔVp>0), и выполняет управление 1 PLS, когда разность ΔVp меньше чем или равна нулю (ΔVp≤0). Таким образом, для того чтобы выходной диапазон электродвигателя 10 не был превышен, преобразователем 123 постоянного тока управляют так, чтобы он выводил высокое напряжение, когда электродвигатель 10 вращается с высокой скоростью вращения. Затем крутящим моментом электродвигателя 10 управляют с помощью управления PWM или управления 1 PLS, выполняемого с помощью обратного преобразователя 117.
В электродвигателе 10, в котором применяют фазовые напряжения, получаемые из обратного преобразователя 117, только шесть моментов времени переключения возникают в один электрический угловой период. Таким образом, обратный преобразователь 117 во время управления 1 PLS выполнен с возможностью изменения выхода только шесть раз за один электрический угловой период. Кроме того, в состоянии, когда подавляется чрезмерное генерирование тока каждой фазы, подаваемой в электродвигатель 10, обратный преобразователь 117 должен установить баланс между напряжением, приложенным к электродвигателю 10, напряжением индукции, генерируемым в электродвигателе 10, и импедансом электродвигателя 10. Таким образом, обуславливается медленный отклик крутящего момента, выводимого из электродвигателя 10, когда обратный преобразователь 117 осуществляет управление 1 PLS. Таким образом, генерируются потери из-за такой задержки отклика.
Цель настоящего изобретения состоит в том, чтобы обеспечить устройство управления для электродвигателя, в котором могут быть уменьшены потери, вызванные задержкой отклика электродвигателя.
Средство для решения задачи
Для решения описанной выше задачи, для достижения описанных выше целей, устройство управления для электродвигателя в соответствии с изобретением, описанное в пункте 1 формулы изобретения, представляет собой устройство управления для электродвигателя (например, электродвигателя 10 в вариантах осуществления), в котором предусмотрен ротор (например, ротор 11 в вариантах осуществления), имеющий постоянный магнит и статор (например, статор 13 в вариантах осуществления), для генерирования вращающегося магнитного поля путем приложения напряжения и вращения ротора, устройство управления, включающее в себя: обратный преобразователь с прямоугольной волной (например, обратный преобразователь 117 в вариантах осуществления), который прикладывает напряжение с прямоугольной волной к статору электродвигателя для управления электродвигателем; блок преобразования напряжения (например, преобразователь 123 постоянного тока в вариантах осуществления), который повышает или понижает выходное напряжение источника питания постоянного тока (например, конденсатора 15 в вариантах осуществления), и прикладывает напряжение к обратному преобразователю с прямоугольной длиной волны; блок получения электрического угла (например, датчик 101 кругового положения и блок 173 оценки фазы в вариантах осуществления), который получает электрический угол ротора электродвигателя; и блок генерирования команды выходного напряжения (например, блок 151, 171 или 181 генерирования команды выходного напряжения в вариантах осуществления), который генерирует команду для подачи инструкции в блок преобразования напряжения, для вывода электрического напряжения, синхронизированного с углом, амплитуда которого пульсирует синхронно с изменением электрического угла ротора, получаемого с помощью блока получения электрического угла. Устройство управления, отличающееся тем, что в ответ на команду, генерируемую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает или понижает выходное напряжение источника питания постоянного тока до напряжения, обозначенного этой командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанное в пункте 2, отличается тем, что обратный преобразователь с прямоугольной волной прикладывает многофазные напряжения с прямоугольной волной к статору, и структура пульсации, обозначенная командой, генерируемой блоком генерирования команды выходного напряжения, имеет такую форму колебаний, что амплитуда напряжения, синхронизированного по электрическому углу, изменяется с периодом, определенным как заданное количество изменения электрического угла, и что напряжение, синхронизированное по электрическому углу, имеет максимум при электрических углах, где любое одно из абсолютных значений многофазных напряжений с прямоугольной волной имеет максимум.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанным в пункте 3, отличается тем, что среднее напряжение, синхронизированное по электрическому углу, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, выводимой на основе крутящего момента, требуемого для электродвигателя, и угловой скоростью ротора, и фактической выходной мощностью, выводимой на основе выходного напряжения и выходного тока блока преобразования напряжения.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанное в пункте 4, представляет собой устройство управления для электродвигателя (например, электродвигателя 10 в вариантах осуществления), в котором предусмотрен ротор (например, ротор 11 в вариантах осуществления), имеющий постоянный магнит и статор (например, статор 13 в вариантах осуществления), для генерирования вращающегося магнитного поля с помощью приложенного напряжения и вращения ротора, устройство управления, включающее в себя: обратный преобразователь с прямоугольной волной (например, обратный преобразователь 117 в вариантах осуществления), который прикладывает напряжение с прямоугольной волной к статору электродвигателя для возбуждения электродвигателя; блок преобразования напряжения (например, преобразователь 123 постоянного тока в вариантах осуществления), который повышает или понижает выходное напряжение источника постоянного тока (например, конденсатор 15 в вариантах осуществления) и прикладывает напряжение к обратному преобразователю с прямоугольной волной; и блок генерирования команды выходного напряжения (например, блок 161 генерирования команды выходного напряжения в вариантах осуществления), который генерирует команду для передачи инструкции в блок преобразования напряжения для вывода напряжения, синхронизированного с электрическим углом, амплитуда которого пульсирует синхронно с изменением напряжения прямоугольной волны, прикладываемого к статору. Устройство управления, отличающееся тем, что в ответ на команду, генерируемую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает или понижает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает напряжение к обратному преобразователю с прямоугольной волной.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанным в пункте 5 формулы изобретения, отличается тем, что обратный преобразователь с прямоугольной волной прикладывает многофазные напряжения с прямоугольной волной к статору, и структура пульсаций, обозначенная командой, генерируемой блоком генерирования команды выходного напряжения, представляет собой такую форму колебаний, что максимум напряжения, синхронизированного с электрическим углом, соответствует электрическим углам, где любые два напряжения фаз между многофазными напряжениями с прямоугольной волной имеют одинаковое значение.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанным в пункте 6, отличается тем, что новый обратный преобразователь с прямоугольной волной прикладывает многофазные напряжения с прямоугольной волной к статору, и структура пульсаций, обозначенная командой, генерируемой блоком генерирования команды выходного напряжения, представляет собой такую форму колебаний, что максимум напряжения, синхронизированного с электрическим углом, соответствует электрическим углам, где любое одно фазное напряжение среди многофазных напряжений с прямоугольной волной становится равным 0.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанное в пункте 7, включает в себя блок получения угловой скорости (например, блок 119 расчета угловой скорости в вариантах осуществления), который получает угловую скорость ротора электродвигателя. Блок управления отличается тем, что среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, выведенной на основе крутящего момента, требуемого для электродвигателя, и угловой скорости ротора, и фактической выходной мощностью, выведенной на основе выходного напряжения и выходного тока блока преобразования напряжения.
Кроме того, устройство управления для электродвигателя в соответствии с изобретением, описанным в пункте 8, отличается тем, что блок преобразования напряжения (например, преобразователь 223 постоянного тока в вариантах осуществления) представляет собой блок преобразования напряжения типа ступенчатого повышения, предназначенный для повышения выходного напряжения источника питания постоянного тока и приложения этого напряжения к обратному преобразователю с прямоугольной волной, причем блок генерирования команды выходного напряжения выводит команду для передачи инструкции в блок преобразования напряжения, для вывода напряжения, синхронизированного с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, и выводит команду для передачи инструкции в блок преобразования напряжения для вывода фиксированного напряжения, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше чем или равно выходному напряжению источника питания постоянного тока, и в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и подает это напряжение в обратный преобразователь с прямоугольной волной.
Эффект изобретения
В соответствии с устройством управления для электродвигателя в соответствии с изобретением, описанным в пунктах 1-8, даже когда обратный преобразователь с прямоугольной волной выполняет управление 1 PLS, потери, связанные с задержкой отклика электродвигателя, могут быть уменьшены. Таким образом, блок преобразования напряжения выводит напряжение, синхронизированное с электрическим углом, амплитуда которого имеет пульсации, синхронные с изменением электрического угла ротора электродвигателя. Это уменьшает пульсации крутящего момента электродвигателя, связанные с изменением электрического угла, и, следовательно, уменьшает потери, вызванные медленным откликом крутящего момента. Кроме того, поскольку пульсации крутящего момента уменьшены, шумы и вибрации электродвигателя 10 уменьшены.
В соответствии с устройством управления для электродвигателя, в соответствии с изобретением, описанным в пп.4-7, блок получения электрического угла, который получает электрический угол ротора электродвигателя, не предусмотрен. Таким образом, блок генерирования команды выходного напряжения может генерировать команду напряжения, синхронизированного с электрическим углом, на которую не влияет ошибка в блоке получения электрического угла.
Краткое описание чертежей
На фиг.1 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с первым вариантом осуществления.
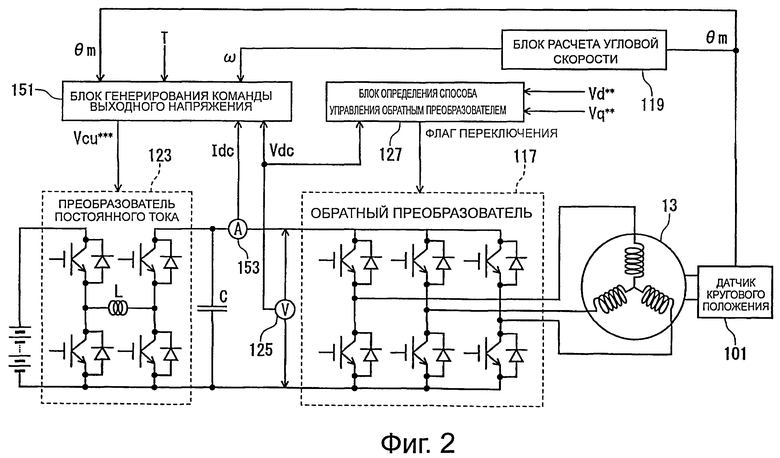
На фиг.2 показана блок-схема, представляющая часть устройства управления для электродвигателя в соответствии с первым вариантом осуществления, а также схемы преобразователя постоянного тока и обратного преобразователя 117.
На фиг.3 показана блок-схема, представляющая как часть устройства управления для электродвигателя в соответствии с первым вариантом осуществления, внутреннюю конфигурацию блока генерирования команды 151 выходного напряжения и блока определения способа управления обратного преобразователя 127 устройства управления для электродвигателя и взаимосвязь с компонентами, относящимися к ним.
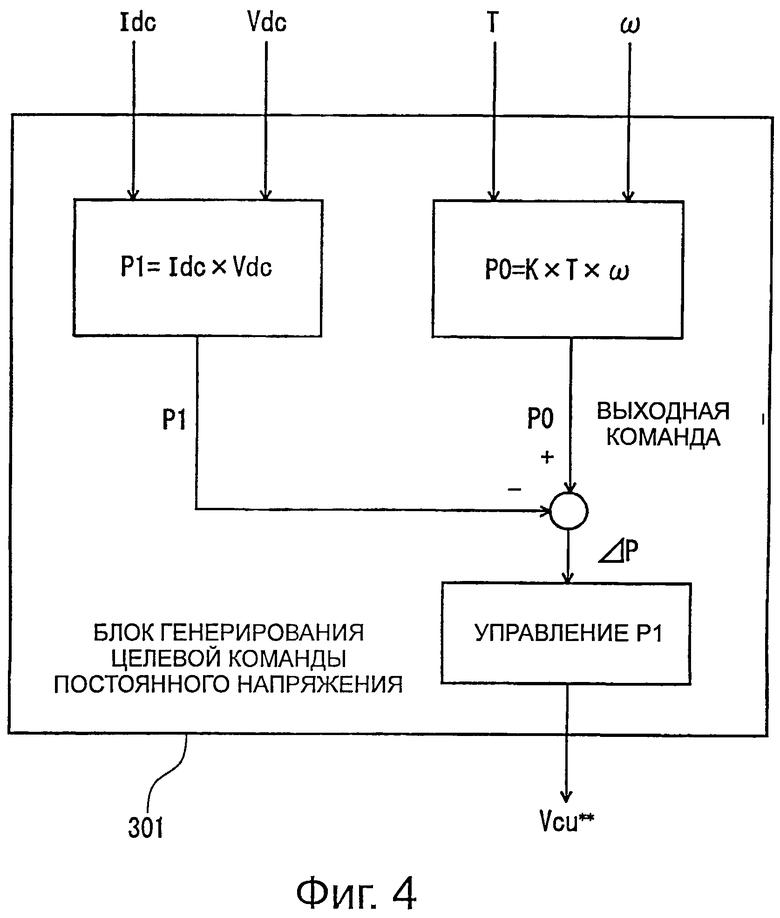
На фиг.4 показана блок-схема, представляющая внутреннюю конфигурацию целевого блока генерирования команды 301 постоянного напряжения, в соответствии с первым вариантом осуществления.
На фиг.5 показан график, представляющий: выходное напряжение преобразователя 123 постоянного тока в соответствии с командой Vcu*** напряжения, синхронизированного с электрическим углом; целевое постоянное напряжение, определенное целевой командой Vcu** постоянного напряжения; и трехфазные переменные напряжения, прикладываемые к электродвигателю 10.
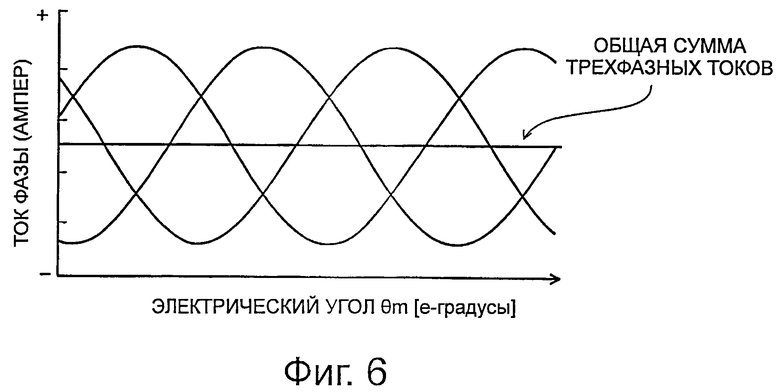
На фиг.6 показан график, представляющий: трехфазные токи, каждый сформированный только из одной основной волны; и их суммарное значение.
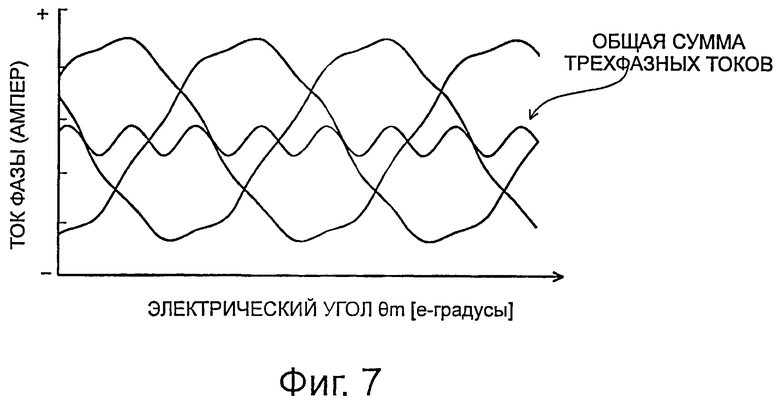
На фиг.7 показан график, представляющий: трехфазные токи, каждый полученный путем наложения 20% шестой высшей гармоники на основную волну; и их суммарное значение.
На фиг.8 показан график, представляющий: трехфазные токи, каждый полученный путем наложения 20% двенадцатой высшей гармоники на основную волну; и их суммарное значение.
На фиг.9 показан график, представляющий: трехфазные токи, каждый полученный путем наложения 20% 18-й высшей гармоники на фундаментальную волну; и их суммарное значение.
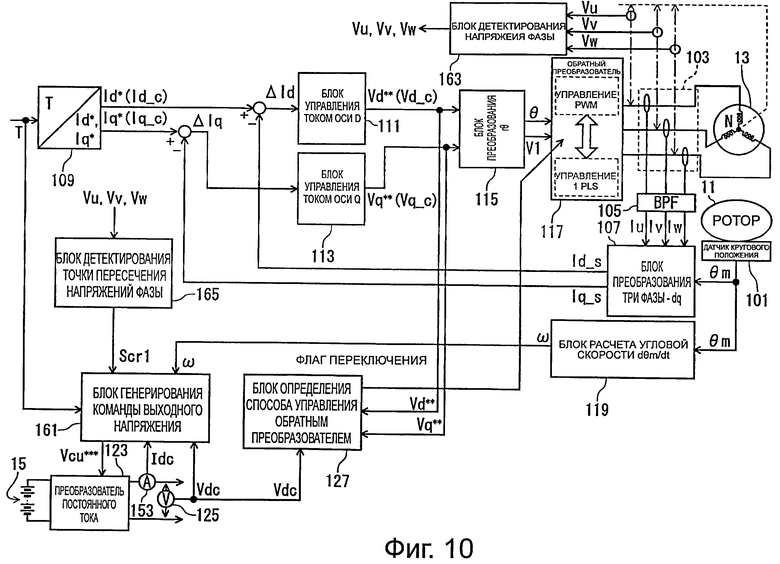
На фиг.10 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии со вторым вариантом осуществления.
На фиг.11 показана блок-схема, представляющая как часть устройства управления для электродвигателя в соответствии со вторым вариантом осуществления, внутреннюю конфигурацию блока 161 генерирования команды выходного напряжения и блока 127 определения способа управления обратным преобразователем устройства управления для электродвигателя и отношение с компонентами, относящимися к ним.
На фиг.12 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с третьим вариантом осуществления.
На фиг.13 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с четвертым вариантом осуществления.
На фиг.14 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с пятым вариантом осуществления.
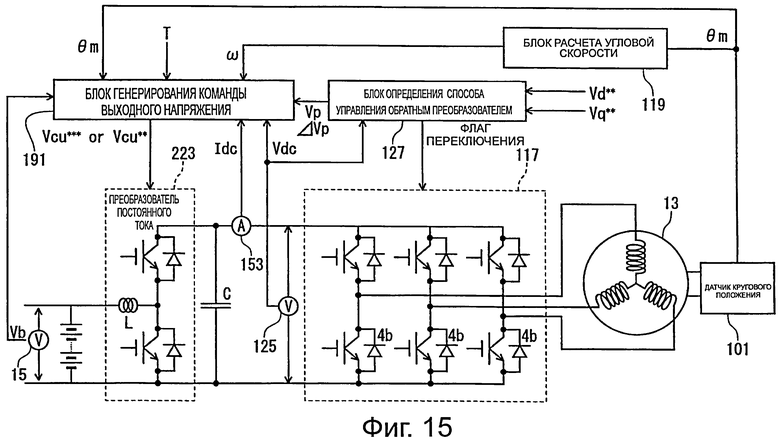
На фиг.15 показана блок-схема, представляющая часть устройства управления для электродвигателя в соответствии с пятым вариантом осуществления, такая же как схема 117 преобразователя постоянного тока и обратного преобразователя.
На фиг.16 показана блок-схема, представляющая, как часть устройства управления для электродвигателя в соответствии с пятым вариантом осуществления, внутреннюю конфигурацию блока 191 генерирования команды выходного напряжения и блока 127 определения способа управления обратного преобразователя устройства управления для электродвигателя и отношение с компонентами, относящимися к ним.
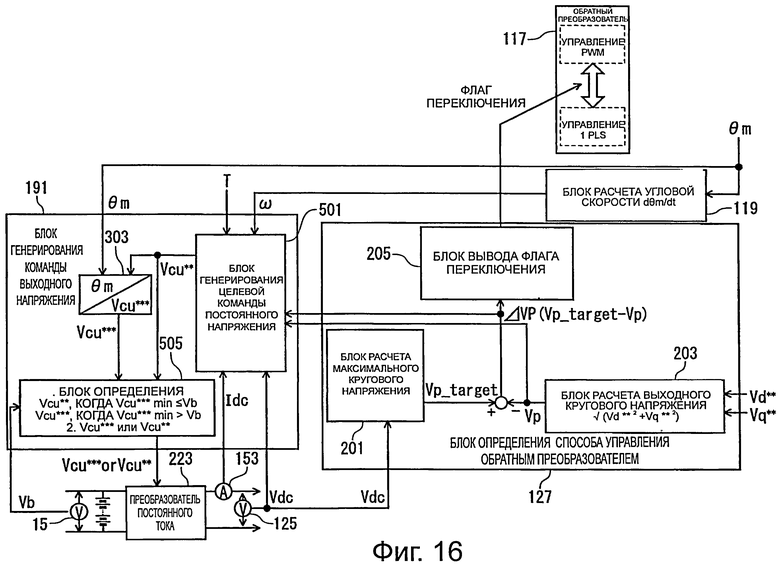
На фиг.17 показана блок-схема, представляющая внутреннюю конфигурацию целевого блока генерирования команды постоянного напряжения 501 в соответствии с пятым вариантом осуществления.
На фиг.18 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с предшествующим уровнем техники настоящего изобретения.
На фиг.19 показана блок-схема, представляющая внутреннюю конфигурацию блока определения способа управления обратного преобразователя 127, показанного на фиг.18, и отношение с компонентами, относящимися к нему.
Подробное описание изобретения
Варианты осуществления настоящего изобретения описаны ниже со ссылкой на чертежи.
(Первый вариант осуществления)
На фиг.1 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с первым вариантом осуществления. Как показано на фиг.1, аналогично устройству управления для электродвигателя, показанному на фиг.18, устройство управления для электродвигателя в соответствии с первым вариантом осуществления имеет датчик 101 кругового положения, датчик 103 тока, полосовой фильтр (BPF) 105, блок 107 преобразования три фазы - dq, блок 109 расчета команды тока, блок 111 управления током оси d, блок 113 управления током оси q, блок 115 преобразования rθ, обратный преобразователь (INV) 117, блок 119 расчета угловой скорости, преобразователь 123 постоянного тока, блок 125 детектирования выходного напряжения и блок 127 определения способа управления обратным преобразователем, а также блок 151 генерирования команды выходного напряжения, используемый в качестве замены блоку 121 генерирования команды постоянного напряжения. Устройство управления для электродвигателя, кроме того, имеет блок 153 детектирования выходного тока. Здесь, на фиг.1, компоненты, одинаковые с показанными на фиг.18, обозначены теми же номерами ссылочных позиций.
На фиг.2 показана блок-схема, представляющая часть устройства управления для электродвигателя в соответствии с первым вариантом осуществления, а также цепи преобразователя постоянного тока и обратного преобразователя 117. Как показано на фиг.2, преобразователь 123 постоянного тока, используемый в настоящем варианте осуществления, представляет собой преобразователь с шаговым повышением/понижением.
Блок 153 детектирования выходного тока, показанный на фиг.1 и 2, детектирует выходной ток Idc преобразователя 123 постоянного тока.
Блок 151 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления генерирует команду Vcu*** для передачи инструкции в преобразователь 123 постоянного тока, для вывода напряжения, уровень которого изменяется синхронно с фазой электрического угла θm ротора электродвигателя 10. Как показано на фиг.1 и 2, блок 151 генерирования команды выходного напряжения принимает: значение Т команды крутящего момента, подаваемого извне; угловую скорость ω, рассчитанную блоком 119 расчета угловой скорости; электрический угол θm, выводимый из датчика 101 кругового положения; выходное напряжение Vdc преобразователя 123 постоянного тока, детектируемое блоком 125 детектирования выходного напряжения; и выходной ток Idc преобразователя 123 постоянного тока, детектируемого блоком 153 детектирования выходного тока.
На фиг.3 показана блок-схема, представляющая как часть устройства управления для электродвигателя в соответствии с первым вариантом осуществления, внутренние конфигурации блока 151 генерирования команды выходного напряжения и блока 127 определения способа управления обратным преобразователем устройства управления для электродвигателя и взаимосвязь с компонентами, соответствующими им. Здесь, на фиг.3, компоненты, аналогичные показанным на фиг.19, обозначены аналогичными номерами ссылочных позиций. Как показано на фиг.3, блок 151 генерирования команды выходного напряжения имеет блок 301 генерирования команды целевого постоянного напряжения и блок 303 генерирования команды напряжения, синхронизированного с электрическим углом. На фиг.4 показана блок-схема, представляющая внутреннюю конфигурацию блока 301 генерирования команды целевого постоянного напряжения в соответствии с первым вариантом осуществления.
Как показано на фиг.4, блок 301 генерирования команды целевого постоянного напряжения умножает коэффициент К, значение Т команды крутящего момента и угловую скорость со друг с другом, так, чтобы вывести требуемую выходную мощность Р0. Кроме того, блок 301 генерирования команды целевого постоянного напряжения умножает выходной ток Idc и выходное напряжение Vdc преобразователя 123 постоянного тока друг с другом для вывода фактической выходной мощности Р1. Блок 301 генерирования команды целевого постоянного напряжения генерирует команду Vcu** целевого постоянного напряжения как управляемую переменную управления PI в соответствии с разностью ΔР (=Р0-Р1) между требуемой выходной мощностью Р0 и фактической выходной мощностью Р1. Команда Vcu** целевого постоянного напряжения поступает в блок 303 генерирования команды напряжения, синхронизированного с электрическим углом.
Блок 303 генерирования команды напряжения, синхронизированного с электрическим углом, генерирует команду Vcu*** напряжения, синхронизированного с электрическим углом, для передачи инструкции в преобразователь 123 постоянного тока для вывода напряжения, синхронизированного с электрическим углом, амплитуда которого имеет пульсации, синхронные с изменением электрического угла θm ротора электродвигателя 10 и среднее значение которой равно команде Vcu** целевого постоянного напряжения, подаваемой из блока 303 генерирования команды напряжения, синхронизированного с электрическим углом. Команда Vcu*** напряжения, синхронизированного с электрическим углом, поступает в преобразователь 123 постоянного тока.
Структура пульсации, синхронизированная с электрическим углом θm, содержится в форме таблицы или формулы в запоминающем устройстве (не показано). На фиг.5 показан график, представляющий: выходное напряжение преобразователя 123 постоянного тока в соответствии с командой Vcu*** напряжения, синхронизированного с электрическим углом; целевое постоянное напряжение, подаваемое по команде Vcu** целевого постоянного напряжения; и трехфазное переменное напряжение, прикладываемое к электродвигателю 10. Структура пульсаций, показанная на фиг.5, имеет период 60 градусов по электрическому углу и форму колебаний, полученную путем двухполупериодного выпрямления синусоидальных колебаний. Таким образом, структура колебаний выражается с помощью формулы |k×sin(3θm)| (здесь k представляет собой коэффициент).
В устройстве управления для электродвигателя 10 в соответствии с настоящим вариантом осуществления, описанным выше, в ответ на команду Vcu*** напряжения, синхронизированного с электрическим углом, преобразователь 123 постоянного тока выводит напряжение, пульсации которого находятся в синхронизации с электрическим углом θm ротора электродвигателя 10. Когда обратный преобразователь 117 выполняет управление 1 PLS, медленный отклик связан с крутящим моментом, подаваемым из электродвигателя 10. Таким образом, обратный преобразователь 117 не может соответствующим образом отвечать на пульсации крутящего момента, связанные с изменением электрического угла θm ротора электродвигателя 10. Однако в настоящем варианте осуществления выходное напряжение преобразователя 123 постоянного тока имеет пульсации со структурой пульсации, показанной на фиг.5, синхронные с электрическим углом θm. Это уменьшает пульсации крутящего момента электродвигателя 10, вызванные изменением электрического угла θm, и, следовательно, уменьшает потери, вызванные медленным откликом крутящего момента. Кроме того, поскольку пульсации крутящего момента электродвигателя 10 уменьшаются, шумы и вибрация электродвигателя 10 уменьшаются.
Когда каждый ток фазы, выводимый из обратного преобразователя 117, состоит только из одной основной волны, суммарное значение трехфазных токов равно 0, независимо от электрического угла θm, как показано на фиг.6. Таким образом, даже когда электрический угол θm изменяется, крутящий момент электродвигателя 10 не изменяется.
Однако ток фазы, выводимый из обратного преобразователя 117, который представляет собой обратный преобразователь с прямоугольной волной, содержит более высокие гармоники. Например, обратный преобразователь 117 выходит трехфазные токи, каждый из которых содержит шесть более высоких гармоник, в целом составляющих 20%, в дополнение к основной волне. Однако, как показано на фиг.7, общее количество трехфазных токов, на которые наложена шестая высшая гармоника, не имеет фиксированного значения.
Однако в настоящем варианте осуществления напряжение, подаваемое из преобразователя 123 постоянного тока в обратный преобразователь 117, имеет пульсации синхронные с электрическим углом θm, как и в настоящем варианте осуществления. Таким образом, когда изменение суммарной величины трехфазных токов, на которые была наложена шестая, более высокая гармоника, компенсируется пульсациями выходного тока преобразователя 123 постоянного тока, суммарное значение трехфазных токов, выводимых из обратного преобразователя 117, имеет фиксированное значение. В результате подавляются более высокие гармоники в фазных токах. Таким образом, даже когда обратный преобразователь 117 выполняет управление 1 PLS, эффективность его работы улучшается.
С другой стороны, как показано на фиг.8 и 9, когда степень изменения суммарного значении трехфазных токов, на которые была наложена шестая, более высокая гармоника, увеличивается на пульсацию выходного тока преобразователя 123 постоянного тока таким образом, что более высокая гармоника была преднамеренно наложена на ток фазы, при этом пульсация крутящего момента электродвигателя 10 уменьшается. Это уменьшает шумы и вибрации электродвигателя 10.
Также когда напряжение, подаваемое из преобразователя 123 постоянного тока в обратный преобразователь 117, имеет пульсации, синхронные с электрическим углом θm, обратный преобразователь 117 во время управления 1 PLS может выводить каждое напряжение фазы, средняя амплитуда которого изменяется в соответствии с электрическим углом θm, без необходимости изменения в управлении PWM. Кроме того, нет необходимости, чтобы управление изменяли с управления 1 PLS на управление PWM так, что частота переключения увеличивается. Это приводит к уменьшению потерь на переключение в обратном преобразователе 117.
(Второй вариант осуществления)
На фиг.10 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии со вторым вариантом осуществления. Как показано на фиг.10, в дополнение к компонентам, предусмотренным в устройстве управления для электродвигателя в соответствии с первым вариантом осуществления, показанным на фиг.1, устройство управления для электродвигателя в соответствии со вторым вариантом осуществления имеет блок 163 детектирования напряжения фазы и блок 165 детектирования точки пересечения напряжений фазы. Здесь, на фиг.10, компоненты, одинаковые с показанными на фиг.1, обозначены теми же номерами ссылочных позиций.
Блок 163 детектирования напряжения фазы детектирует трехфазные переменные напряжения Vu, Vv и Vw, прикладываемые к статору 13 электродвигателя 10. Трехфазные переменные напряжения Vu, Vv и Vw, детектируемые блоком 163 детектирования напряжения фазы, подают в блок 165 детектирования точки пересечения фазных напряжений. Блок 165 детектирования точки пересечения фазных напряжений детектирует моменты времени, в которые любые два фазных напряжения среди трехфазных переменных напряжений Vu, Vv и Vw имеют одинаковое значение. Когда блок 165 детектирования точки пересечения фазных напряжений детектирует этот момент времени, блок 165 детектирования точки пересечения напряжения фазы подает сигнал Scr1 в блок 161 генерирования команды выходного напряжения. При этом блок 161 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления принимает сигнал Scr1 из блока 165 детектирования точки пересечения напряжения фазы вместо электрического угла θm ротора 11.
На фиг.11 показана блок-схема, представляющая часть устройства управления для электродвигателя в соответствии со вторым вариантом осуществления, внутренние конфигурации блока 161 генерирования команды выходного напряжения и блока 127 определения способа управления обратным преобразователем, устройство управления для электродвигателя и взаимосвязь с компонентами, относящимися к ним. Здесь, на фиг.11, компоненты, аналогичные представленным на фиг.3, обозначены одинаковыми номерами ссылочных позиций.
Блок 403 генерирования команды напряжения, синхронизированного с электрическим углом, который предусмотрен в блоке 161 генерирования команды выходного напряжения, в соответствии с настоящим вариантом осуществления, генерирует команду Vcu*** напряжения, синхронизированного с электрическим углом, для передачи инструкции в преобразователь 123 постоянного тока, для вывода напряжения, синхронизированного с электрическим углом, пульсации амплитуды которого синхронны с сигналом Scr1 из блока 165 детектирования точки пересечения напряжений фазы и среднее значение которого равно команде Vcu** целевого постоянного напряжения, вводимой из блока 403 генерирования синхронизированной команды напряжения электрического угла. В структуре пульсаций, синхронизированной с сигналом Scr1, момент времени, когда сигнал Scr1 подают из блока 165 детектирования точки пересечения напряжений фазы, соответствует максимуму напряжения, синхронизированного с электрическим углом.
Здесь, в другом варианте осуществления, вместо блока 165 детектирования точки пересечения напряжения фазы, блок детектирования нулевой точки напряжения фазы может быть предусмотрен так, чтобы он детектировал моменты времени, в которые любое одно из напряжений фазы среди трехфазных переменных напряжений Vu, Vv и Vw становится равным 0. Когда блок детектирования нулевой точки напряжения фазы детектирует этот момент времени, блок детектирования нулевой точки напряжения фазы выводит сигнал Scr2 в блок 161 генерирования команды выходного напряжения.
Блок 403 генерирования команды напряжения, синхронизированного с электрическим углом, предусмотренный в блоке 161 генерирования команды выходного напряжения, генерирует команду Vcu*** напряжения, синхронизированного с электрическим углом, для передачи инструкций в преобразователь 123 постоянного тока для вывода напряжения, синхронизированного с электрическим углом, амплитуда которого имеет пульсации, синхронные с сигналом Scr2 из блока детектирования нулевой точки напряжения фазы и среднее значение которого равно команде Vcu** целевого постоянного напряжения, подаваемой из блока 403 генерирования команды напряжения, синхронизированного с электрическим углом. В структуре пульсаций, синхронизированной с сигналом Scr2, моменты времени, в которые сигнал Scr2 вводят из блока детектирования нулевой точки напряжения фазы, соответствует минимуму напряжения, синхронизированного с электрическим углом.
В устройстве управления для электродвигателя 10, в соответствии с настоящим вариантом осуществления, описанным выше, генерируют команду Vcu*** напряжения, синхронизированного с электрическим углом, который соответствует сигналу Scr1, из блока 165 детектирования точки пересечения напряжения фазы, или, в качестве альтернативы, сигналу Scr2 из блока детектирования нулевой точки напряжения фазы, вместо электрического угла θm ротора 11, детектируемого датчиком 101 кругового положения. Таким образом, блок 403 генерирования команды напряжения, синхронизированного с электрическим углом, в соответствии с настоящим вариантом осуществления, может генерировать команду Vcu*** напряжения, синхронизированного с электрическим углом, на который не влияет ошибка детектирования датчика 101 кругового положения.
(Третий вариант осуществления)
На фиг.12 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с третьим вариантом осуществления. Как показано на фиг.12, устройство управления для электродвигателя в соответствии с третьим вариантом осуществления имеет блок 173 оценки фазы вместо датчика 101 кругового положения, предусмотренного в устройстве управления для электродвигателя в соответствии с первым вариантом осуществления, показанным на фиг.1. Здесь, на фиг.12, компоненты, такие же, как показанные на фиг.1, обозначены теми же номерами ссылочных позиций.
Блок 173 оценки фазы выполняет оценку электрического угла ротора электродвигателя 10 на основе трехфазных переменных токов Iu, Iv и Iw, детектируемых датчиком 103 тока. Электрический угол θs, оценку которого получают с помощью блока 173 оценки фазы, передают в блок 107 преобразования три фазы - dq, блок 119 расчета угловой скорости и блок 171 генерирования команды выходного напряжения. При этом блок 171 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления принимает электрический угол θs, оценка которого была получена с помощью блока 173 оценки фазы вместо электрического угла θm ротора 11, детектируемого датчиком 101 кругового положения. В блоке 171 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления электрический угол θs обрабатывают аналогично электрическому углу θm в первом варианте осуществления.
(Четвертый вариантом осуществления)
На фиг.13 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с четвертым вариантом осуществления. Как показано на фиг.13, в устройстве управления для электродвигателя в соответствии с четвертым вариантом осуществления, угол θ, выводимый блоком 115 преобразования rθ, вводят как электрический угол ротора электродвигателя 10, который должен быть подан в блок 181 генерирования команды выходного напряжения. Здесь, на фиг.13, те же компоненты, что показаны на фиг.1, обозначены одинаковыми номерами ссылочных позиций. В блоке 181 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления угол θ обрабатывают аналогично электрическому углу θm в первом варианте осуществления.
(Пятый вариантом осуществления)
На фиг.14 показана блок-схема, представляющая устройство управления для электродвигателя в соответствии с пятым вариантом осуществления. Кроме того, на фиг.15 показана блок-схема, представляющая часть устройства управления для электродвигателя в соответствии с пятым вариантом осуществления, так же, как и схемы преобразователя постоянного тока и обратного преобразователя 117. Как показано на фиг.14, устройство управления для электродвигателя в соответствии с пятым вариантом осуществления имеет блок 193 детектирования напряжения батареи, предназначенный для детектирования выходного напряжения (ниже называется "напряжением батареи") Vb конденсатора 15, в дополнение к компонентам, предусмотренным в устройстве управления для электродвигателя в соответствии с первым вариантом осуществления, показанным на фиг.1. Здесь напряжение Vb батареи, детектируемое блоком 193 детектирования напряжения батареи, вводят в блок 191 генерирования команды выходного напряжения. Кроме того, как показано на фиг.15, преобразователь 223 постоянного тока, используемый в настоящем варианте осуществления, представляет собой преобразователь со ступенчатым повышением. Таким образом, преобразователь 223 постоянного тока выполняет одно ступенчатое повышение для выходного постоянного напряжения на конденсаторе 15 в форме исходного постоянного тока.
Кроме того, как показано на фиг.15, внутренняя конфигурация блока 191 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления отличается от конфигурации блока 151 генерирования команды выходного напряжения в соответствии с первым вариантом осуществления. Кроме того, в настоящем варианте осуществления блок 127 определения способа управления обратным преобразователем вводит в блок 191 генерирования команды выходного напряжения: полученное в результате векторное напряжение Vp, описанное в первом варианте осуществления; и разность ΔVp между значением Vp_target, выведенным блоком 201 расчета максимального кругового напряжения и полученным в результате векторным напряжением Vp. Здесь, на фиг.14 и 15, те же компоненты, что и на фиг.1 и 2, обозначены одинаковыми номерами ссылочных позиций.
На фиг.16 показана блок-схема, представляющая, как часть устройства управления для электродвигателя в соответствии с пятым вариантом осуществления, внутреннюю конфигурацию блока 191 генерирования команды выходного напряжения и блока 127 определения способа управления обратным преобразователем, устройство управления электродвигателем и взаимосвязь с компонентами, соответствующими им. Здесь, на фиг.16, компоненты, такие же, как и на фиг.3, обозначены одинаковыми номерами ссылочных позиций. Как показано на фиг.16, блок 191 генерирования команды выходного напряжения в соответствии с настоящим вариантом осуществления имеет блок 501 генерирования целевой команды постоянного напряжения, блок 303 генерирования команды напряжения, синхронизированного с электрическим углом, и блок 505 определения. На фиг.17 показана блок-схема, представляющая внутреннюю конфигурацию блока 501 генерирования целевой команды постоянного напряжения в соответствии с пятым вариантом осуществления.
Как показано на фиг.17, аналогично первому варианту осуществления блок 501 генерирования целевой команды постоянного напряжения генерирует целевую команду Vcu**1 постоянного напряжения как управляемую переменную управления PI в соответствии с разностью ΔР (=Р0-Р1) между требуемой выходной мощностью Р0 и фактической выходной мощностью Р1. Кроме того, блок 501 генерирования целевой команды постоянного напряжения умножает полученное в результате векторное напряжение Vp, вводимое из блока 127 определения способа управления обратным преобразователем, и коэффициент а (√б) использования напряжения друг с другом, для генерирования целевой команды Vcu**2 постоянного напряжения. Кроме того, блок 501 генерирования целевой команды постоянного напряжения выводит команду Vcu** целевого постоянного напряжения, соответствующую разности ΔVp, введенной из блока 127 определения способа управления обратным преобразователем. Таким образом, блок 501 генерирования целевой команды постоянного напряжения выводит целевую команду Vcu**1 постоянного напряжения, когда ΔVp>0, и выводит целевую команду Vcu**2 постоянного напряжения, когда ΔVp≤0.
Целевую команду Vcu** напряжения постоянного напряжения, выводимую из блока 501 генерирования целевой команды постоянного напряжения подают в блок 303 генерирования команды напряжения, синхронизированного с электрическим углом, и в блок 505 определения. Кроме того, команду Vcu*** напряжения, синхронизированного с электрическим углом, генерируемую блоком 303 генерирования команды напряжения, синхронизированной с электрическим углом, вводят в блок 505 определения. Блок 505 определения выводит целевую команду Vcu** постоянного напряжения или, в качестве альтернативы, команду Vcu*** напряжения, синхронизированного с электрическим углом, в зависимости от результата сравнения между минимальным значением (Vcu***, min) команду Vcu*** напряжения, синхронизированного с электрическим углом, множество пульсаций которой синхронно с изменением электрического угла Gm ротора электродвигателя 10 и напряжения Vb батареи конденсатора 15. Таким образом, блок 505 определения выводит целевую команду Vcu** постоянного напряжения, когда Vcu***min≤Vb, и выводит команду Vcu*** напряжения, синхронизированного с электрическим углом, когда Vcu***min>Vb. Целевую команду Vcu** постоянного напряжения или, в качестве альтернативы, команду Vcu*** напряжения, синхронизированного с электрическим углом, выводимую из блока 505 определения, подают в преобразователь 223 постоянного тока.
В устройстве управления для электродвигателя 10 в соответствии с настоящим вариантом осуществления, описанным выше, преобразователь 223 постоянного тока ступенчатого типа работает в соответствии с целевой командой Vcu** постоянного напряжения или, в качестве альтернативы, с командой Vcu*** напряжения, синхронизированного с электрическим углом. Когда Vcu***min больше, чем Vb (Vcu***min>Vb), достаточно, чтобы преобразователь 223 постоянного тока выполнил только ступенчатое повышение. Таким образом, преобразователь 223 постоянного тока может соответствующим образом реагировать на команду Vcu*** напряжения, синхронизированного с электрическим углом. С другой стороны, когда Vcu***min меньше чем или равно Vb (Vcu***min≤Vb), преобразователь 223 постоянного тока не может соответствующим образом реагировать на команду Vcu*** напряжения, синхронизированного с электрическим углом. Таким образом, когда Vcu***min меньше чем или равно Vb, преобразователь 223 постоянного тока оперирует в соответствии с целевой командой Vcu** постоянного напряжения, для вывода напряжения, которое больше чем или равно напряжению Vb батареи и не имеет пульсаций амплитуды.
Таким образом, даже в преобразователе 223 постоянного тока типа ступенчатого повышения, когда Vcu***min больше, чем Vb, получают эффект, аналогичный первому варианту осуществления. Здесь второй - четвертый варианты осуществления могут применяться к устройству управления для электродвигателя 10 в соответствии с настоящим вариантом осуществления.
В случае, когда устройство управления для электродвигателя в соответствии с описанными выше вариантами осуществления установлено на транспортном средстве и когда электродвигатель 10 предусмотрен с целью привода в движение транспортного средства таким образом, чтобы шумы и вибрации электродвигателя 10 были уменьшены благодаря уменьшению пульсаций крутящего момента в электродвигателе 10, улучшается долговечность.
Настоящее изобретение было подробно описано выше со ссылкой на определенные варианты осуществления. При этом для специалиста в данной области техники будет понятно, что различные виды модификаций и коррекций могут быть выполнены, без выхода за пределы сущности и объема настоящего изобретения.
Настоящая заявка основана на заявке на японский патент (заявка №2009-050255 на японский патент), поданной 4 марта 2009 г. Ее содержание представлено здесь по ссылке.
Описание номеров ссылочных позиций
10 электродвигатель
11 ротор
13 статор
15 конденсатор
101 датчик положения
103 датчик тока
105 полосовой фильтр (BPF)
107 блок преобразования три фазы - dq
109 блок расчета команды тока
111 блок управления током оси d
113 блок управления током оси q
115 блок преобразования rθ
117 обратный преобразователь (INV)
119 блок расчета угловой скорости
123, 223 преобразователь постоянного тока
125 блок детектирования выходного напряжения
127 блок определения способа управления обратным преобразователем
151, 161, 171, 181, 191 блок генерирования команды выходного напряжения
153 блок детектирования выходного тока
201 блок расчета максимального кругового напряжения
203 блок расчета выходного кругового напряжения
205 блок вывода флага переключения
301, 501 блок генерирования целевой команды постоянного напряжения
303, 403 блок генерирования команды напряжения, синхронизированной с электрическим углом
163 блок детектирования фазных напряжений
165 блок детектирования точки пересечения фазных напряжений
173 блок оценки фазы
193 блок детектирования напряжения батареи
505 блок определения
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2447572C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2009 |
|
RU2462806C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2659372C1 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И СПОСОБ ОБНАРУЖЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ ЧИСЛА ОБОРОТОВ БЕЗДАТЧИКОВОГО EPB-ЭЛЕКТРОДВИГАТЕЛЯ | 2017 |
|
RU2704965C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2410831C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2454774C9 |
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |









Изобретение относится к области электротехники и может быть использовано для управления электродвигателем, имеющего ротор с постоянными магнитами. Техническим результатом является уменьшение потерь, вызываемых задержкой отклика электродвигателя. Устройство управления для электродвигателя с ротором на постоянных магнитах, статором содержит: обратный преобразователь с прямоугольной волной, который прикладывает напряжение с прямоугольной волной к статору электродвигателя, для возбуждения электродвигателя; блок преобразования напряжения, который повышает или понижает выходное напряжение источника питания постоянного тока и прикладывает это напряжение к обратному преобразователю с прямоугольной волной; блок получения электрического угла, который получает электрический угол ротора электродвигателя; и блок генерирования команды выходного напряжения, который генерирует команду, для передачи инструкции в блок преобразования напряжения на вывод напряжения, синхронизированного с электрическим углом, амплитуда которого имеет пульсации, синхронные с изменением электрического угла ротора, полученного блоком получения электрического угла. В ответ на команду, генерируемую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает или понижает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной. 2 н. и 15 з.п. ф-лы, 19 ил.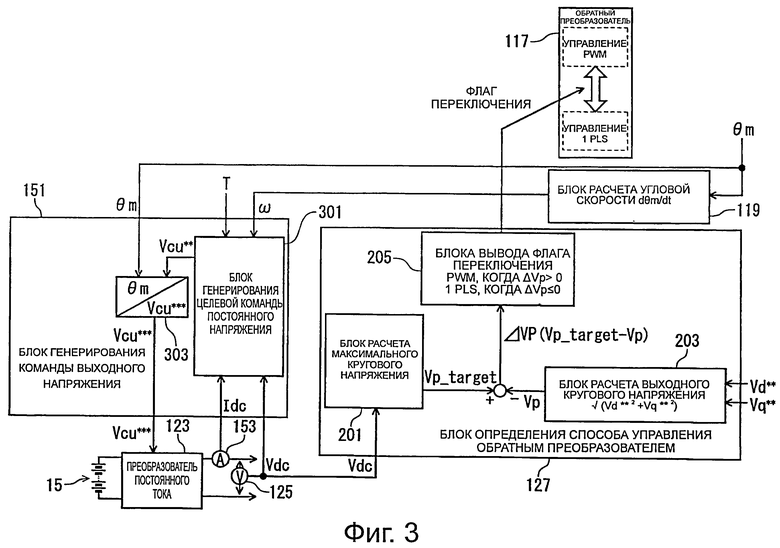
1. Устройство управления для электродвигателя, содержащего ротор с постоянным магнитом и вращающий ротор статор, создающий вращающееся магнитное поле при приложении напряжения, характеризующееся тем, что содержит:
обратный преобразователь с прямоугольной волной, выполненный с возможностью прикладывать напряжение с прямоугольной волной к статору электродвигателя для возбуждения электродвигателя;
блок преобразования напряжения, выполненный с возможностью повышать или понижать выходное напряжение источника питания постоянного тока и прикладывать указанное напряжение к обратному преобразователю с прямоугольной волной;
блок получения электрического угла, выполненный с возможностью получать электрический угол ротора электродвигателя; и
блок генерирования команды выходного напряжения, выполненный с возможностью генерировать команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, амплитуда которого имеет пульсации, синхронные с изменением электрического угла ротора, получаемого блоком получения электрического угла,
при этом в ответ на команду, генерируемую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает или понижает выходное напряжение источника питания постоянного тока до напряжения, обозначенного указанной командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
2. Устройство управления для электродвигателя по п.1, в котором обратный преобразователь с прямоугольной волной выполнен с возможностью прикладывать многофазные напряжения с прямоугольной волной к статору, при этом структура пульсации, обозначенная указанной командой, генерируемой блоком генерирования команды выходного напряжения, имеет такую форму колебаний, что амплитуда напряжения, синхронизированного с электрическим углом, изменяется с периодом, определяемым как заданная величина изменения электрического угла, причем напряжение, синхронизированное с электрическим углом, имеет максимум при электрических углах, при которых любое из абсолютных значений указанных многофазных напряжений с прямоугольной волной имеет максимум.
3. Устройство управления для электродвигателя по п.1, в котором среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, полученной на основе крутящего момента, требуемого для электродвигателя, и угловой скорости ротора, и фактической выходной мощностью, полученной на основе выходного напряжения и выходного тока блока преобразования напряжения.
4. Устройство управления для электродвигателя по п.2, в котором среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, полученной на основе крутящего момента, требуемого для электродвигателя, и угловой скорости ротора, и фактической выходной мощностью, полученной на основе выходного напряжения и выходного тока блока преобразования напряжения.
5. Устройство управления для электродвигателя, содержащего ротор с постоянным магнитом и вращающий ротор статор, создающий вращающееся магнитное поле при приложении напряжения, характеризующееся тем, что содержит:
обратный преобразователь с прямоугольной волной, выполненный с возможностью прикладывать напряжение с прямоугольной волной к статору электродвигателя для возбуждения электродвигателя;
блок преобразования напряжения, выполненный с возможностью повышать или понижать выходное напряжение источника питания постоянного тока и прикладывать указанное напряжение к обратному преобразователю с прямоугольной волной; и
блок генерирования команды выходного напряжения, выполненный с возможностью генерировать команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, амплитуда которого имеет пульсации, синхронные с изменением указанного напряжения с прямоугольной волной, прикладываемого к статору,
при этом в ответ на команду, генерируемую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает или понижает выходное напряжение источника питания постоянного тока до напряжения, обозначенного указанной командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
6. Устройство управления для электродвигателя по п.5, в котором
обратный преобразователь с прямоугольной волной выполнен с возможностью прикладывать многофазные напряжения с прямоугольной волной к статору,
при этом структура пульсации, обозначенная указанной командой, генерируемой блоком генерирования команды выходного напряжения, имеет такую форму колебаний, что максимум напряжения, синхронизированного с электрическим углом, соответствует электрическим углам, при которых любые два фазных напряжения из многофазных напряжений с прямоугольной волной имеют одинаковое значение.
7. Устройство управления для электродвигателя по п.5, в котором
обратный преобразователь с прямоугольной волной выполнен с возможностью прикладывать многофазные напряжения с прямоугольной волной к статору,
при этом структура пульсации, обозначенная указанной командой, генерируемой блоком генерирования команды выходного напряжения, имеет такую форму колебаний, что максимум напряжения, синхронизированного с электрическим углом, соответствует электрическим углам, при которых одно напряжение фазы из многофазных напряжений с прямоугольной волной становится равным 0.
8. Устройство управления для электродвигателя по п.5, дополнительно содержащее блок получения угловой скорости, выполненный с возможностью получения угловой скорости ротора в электродвигателе, при этом среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, полученной на основе требуемого для электродвигателя крутящего момента и угловой скорости ротора, и фактической выходной мощностью, полученной на основе выходного напряжения и выходного тока блока преобразования напряжения.
9. Устройство управления для электродвигателя по п.6, дополнительно содержащее блок получения угловой скорости, выполненный с возможностью получения угловой скорости ротора в электродвигателе, при этом среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, полученной на основе требуемого для электродвигателя крутящего момента и угловой скорости ротора, и фактической выходной мощностью, полученной на основе выходного напряжения и выходного тока блока преобразования напряжения.
10. Устройство управления для электродвигателя по п.7, дополнительно содержащее блок получения угловой скорости, выполненный с возможностью получения угловой скорости ротора в электродвигателе, при этом среднее значение напряжения, синхронизированного с электрическим углом, представляет собой значение, полученное в соответствии с разностью между требуемой выходной мощностью, полученной на основе требуемого для электродвигателя крутящего момента и угловой скорости ротора, и фактической выходной мощностью, полученной на основе выходного напряжения и выходного тока блока преобразования напряжения.
11. Устройство управления для электродвигателя по п.1, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
12. Устройство управления для электродвигателя по п.2, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
13. Устройство управления для электродвигателя по п.3, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
14. Устройство управления для электродвигателя по п.4, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
15. Устройство управления для электродвигателя по п.5, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
16. Устройство управления для электродвигателя по п.6, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
17. Устройство управления для электродвигателя по п.7, в котором
блок преобразования напряжения представляет собой блок преобразования напряжения со ступенчатым повышением, выполненный с возможностью повышения выходного напряжения источника питания постоянного тока и подачи этого напряжения в обратный преобразователь с прямоугольной волной,
при этом блок генерирования команды выходного напряжения выполнен с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить напряжение, синхронизированное с электрическим углом, когда минимальное значение напряжения, синхронизированного с электрическим углом, больше, чем выходное напряжение источника питания постоянного тока, а также выполнено с возможностью выводить команду для передачи инструкции в блок преобразования напряжения, с тем чтобы выводить фиксированное напряжение, когда минимальное значение напряжения, синхронизированного с электрическим углом, меньше или равно выходному напряжению источника питания постоянного тока,
причем в ответ на команду, выводимую блоком генерирования команды выходного напряжения, блок преобразования напряжения повышает выходное напряжение источника питания постоянного тока до напряжения, обозначенного командой, и прикладывает это напряжение к обратному преобразователю с прямоугольной волной.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 1998 |
|
RU2209502C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| US 6541939 В2, 01.04.2003 | |||
| JP 2007181398 А, 12.07.2007 | |||
| JP 2007306658 А, 22.11.2007 | |||
| ЕР 1873900 А1, 02.01.2008 | |||
| Способ контроля содержания углерода в стали | 1976 |
|
SU613234A1 |
| WO 2007129760 А1, 15.11.2007. | |||

