Область техники, к которой относится изобретения
Настоящее изобретение относится к устройству и способу обеспечения пространственной стабильности многоэлементных физических конструкций в процессе сборки.
Без ограничения общей применимости настоящее изобретение, а также лежащие в его основе проблемы объясняются по отношению к сборке многоэлементных конструкций воздушного судна.
Уровень техники
Производственное оборудование, которое используется в настоящее время для изготовления фюзеляжей воздушных судов, включает в себя формообразующие элементы, благодаря которым формируется окончательная геометрия внешней обшивки. Эти формообразующие элементы обычно выполняются из стали и изготавливаются таким образом, чтобы к ним могли быть прикреплены внутренние панели фюзеляжа, так, чтобы окончательное положение внешнего профиля соответствовало расчетному контуру. В этом случае необходимо следить за тем, чтобы в течение всего срока применения формообразующих элементов, в частности за весь период изготовления соответствующего фюзеляжа воздушного судна, изменение формообразующих элементов было в пределах порядка величины, не выходящей за границы интервала допускаемых отклонений.
Более современная технология изготовления обходится уже без этих формообразующих элементов и использует для этой цели оси позиционирования с числовым программным управлением (ЧПУ). В этом случае геометрическая форма обеспечивается путем правильного позиционирования отдельных элементов фюзеляжа относительно друг друга. Данная технология изготовления, так же как и технология, описанная выше, предполагает проверку результата по завершении всего технологического процесса. Это необходимо по той причине, что производственная среда не остается постоянной в течение всего периода технологического процесса, например, из-за температурных изменений, частичного опускания и поднятия производственных цехов, вызванного геологическими процессами, и так далее.
Один из недостатков, выявленных у описанных выше технологий изготовления, заключается в том, что в определенных обстоятельствах измерения в конце всего технологического процесса выявляют недопустимую погрешность. Тот факт, что недопустимая погрешность возникает на отдельном этапе технологического процесса, после выполнения всех операций придания ценностных качеств, делает эти концепции изготовления дорогими с финансовой точки зрения и непривлекательными.
Раскрытие изобретения
По этой причине задачей настоящего изобретения является создание более совершенных способа и устройства для обеспечения пространственной стабильности многоэлементных конструкций при сборке. Описанные способ и устройство позволяют контролировать и в случае необходимости корректировать пространственную стабильность на любом этапе производственного процесса, предпочтительно постоянно.
Изобретение предусматривает способ обеспечения пространственной стабильности многоэлементных физических конструкций, в частности конструкций воздушных судов с признаками пункта 1 формулы изобретения, и соответствующее устройство с признаками пункта 11 формулы изобретения, а также компьютерный программный продукт с признаками пункта 12 формулы изобретения.
Зависимые пункты формулы изобретения характеризуют варианты усовершенствования и модернизации объекта изобретения.
Термин «конструкция воздушного судна» относится, например, к фюзеляжу воздушного судна и/или секциям воздушного судна, основным поверхностям или секциям основных поверхностей, а также стабилизаторам или частям стабилизаторов.
Например, пространственно-неподвижная трехмерная координатная система может быть образована с привязкой к неподвижной точке внутри производственного цеха или с привязкой к неподвижной точке вне производственного цеха, например с привязкой к одному или нескольким искусственным спутникам.
В качестве примера, если выясняется, что пространственная стабильность не соответствует требуемой, то один из способов исправить ситуацию заключается в том, что перед тем, как жестко соединить два элемента физической конструкции, которые должны быть собраны друг с другом, их следует повторно совместить относительно друг друга. Также обеспечивается корректировка положения элемента или уже собранной группы элементов, вследствие чего пространственная стабильность не выходит за пределы предопределенного поля допуска. Другими словами, соответствующий изобретению способ и соответствующее изобретению устройство обеспечивают определенные, предпочтительно свободно предопределяемые допуски точно таким же образом, как и любой другой способ измерения и/или способ проверки.
В принципе, для контроля положения в пространственно-неподвижной трехмерной координатной системе могут быть использованы две описанные ниже методики:
a) Относительное положение элементов или группы элементов относительно друг друга контролируется в пространственно-неподвижной координатной системе, а элементы или группы элементов выравниваются относительно друг друга, исходя из зарегистрированных положений (координат). В этом случае пространственное положение полностью собранной физической конструкции в пространственно-неподвижной координатной системе является вопросом второстепенной важности.
b) Абсолютное положение элементов или группы элементов относительно друг друга контролируется в пространственно-неподвижной координатной системе, а элементы выравниваются, исходя из предопределенных расчетных координат в пространственно-неподвижной координатной системе. В этом случае пространственное положение всей физической конструкции в пространственно-неподвижной координатной системе является вопросом первостепенной важности.
Преимущество соответствующего изобретению способа с признаками пункта 1 формулы изобретения, а также устройства с признаками пункта 11 формулы изобретения над известным уровнем техники заключается в том, что результат сборки физической конструкции может быть предварительно определен и/или скорректирован на любом этапе процесса сборки. Периодическая, предпочтительно непрерывная регистрация координат отдельных элементов или групп элементов в течение всего периода сборки физической конструкции делает это возможным при использовании формообразующих элементов для предотвращения отклонения от требуемой пространственной стабильности с применением процедуры отбраковки, так что в конце процесса сборки имеет место требуемая пространственная стабильность, а физическая конструкция может сразу же подвергаться дальнейшей обработке.
При использовании устройств позиционирования с числовым программным управлением определенные в процессе сборки геометрические характеристики могут быть сразу же обработаны и использованы в качестве контролируемых параметров, так что в идеале по завершении процесса сборки не должно существовать отклонений от требуемой пространственной стабильности.
Одна предпочтительная модификация изобретения заключается в том, что для бесконтактной регистрации координат отдельных элементов или групп элементов контрольные точки остаются постоянно привязанными к отдельным элементам или группам элементов во время сборки физической конструкции. При этом координаты контрольных точек регистрируются в пространственно-неподвижной координатной системе и/или регистрируется взаимное расположение относительно контрольных точек, связанных с различными элементами. Любая корректировка положения, которая может потребоваться, выполняется путем изменения координат контрольных точек в пространственно-неподвижной координатной системе и/или путем изменения взаимного расположения контрольных точек, связанных с различными элементами. В качестве примера контрольные точки могут включать в себя контрольные точки, которые обычно используются для устройств позиционирования с числовым программным управлением, например, цветные метки на отдельных элементах. Контрольные точки, предпочтительно, включают в себя вспомогательные устройства, привязанные к элементам или группам элементов, которые могут, например, определять текущие координаты по искусственным спутниками и передавать эти координаты в центральное управляющее устройство.
Дальнейшая предпочтительная модификация изобретения заключается в том, что пространственно-неподвижная координатная система образована главным передатчиком и несколькими вспомогательным передатчиками, при этом осуществляется постоянная регистрация положения вспомогательных передатчиков относительно главного передатчика, а измеренные значения, поступающие от вспомогательных передатчиков, корректируются в случае отклонения от предварительно заданных расчетных значений координат, поступающих от вспомогательных передатчиков. В качестве примера главный передатчик может представлять собой чувствительный элемент для бесконтактной регистрации координат одного или нескольких элементов в пространственно-неподвижной координатной системе, при этом координаты чувствительного элемента в производственном цехе известны, или его координаты используются априори в качестве начальной или опорной точки в пространственно-неподвижной координатной системе. В этом случае вспомогательные передатчики могут быть дополнительными чувствительными элементами, которые предпочтительно имеют прямую или косвенную визуальную связь с главным передатчиком, и, например, осуществляют регистрацию координат элементов, расположенных на той стороне физической конструкции, которая находится вне зоны видимости главного передатчика. Это практически осуществимо для пространственно-неподвижной координатной системы, образуемой посредством координатных данных, полученных через искусственные спутники. В этом случае спутники, которые находятся над линией горизонта и служат для определения координат, используются в качестве вспомогательных передатчиков, а например, наземная станция спутниковой связи, чье местоположение известно, выступает в качестве главного передатчика для того, чтобы корректировать погрешность, связанную с временной задержкой и/или с неточностью определения координат по искусственным спутникам.
Дальнейшая предпочтительная модификация изобретения заключается в том, что координаты отдельных элементов и/или контрольных точек, привязанных к отдельным элементам, регистрируются бесконтактным образом передатчиками в пространственно-неподвижной координатной системе. В этом случае предусматривается, чтобы передатчики в пространственно-неподвижной координатной системе включали в себя, например, чувствительные элементы для бесконтактной регистрации координат отдельных элементов, при этом координаты главного передатчика, например, используются в качестве исходной точки пространственно-неподвижной координатной системы, и главный передатчик используется, главным образом, для контроля координат вспомогательных передатчиков для того, чтобы корректировать значения, измеренные чувствительными элементами, которые используются в качестве вспомогательных передатчиков, в случае появления отклонений от их расчетных координат.
Дальнейшая предпочтительная модификация изобретения заключается в том, что координаты отдельных элементов и/или контрольных точек, привязанных к отдельным элементам, контролируются вспомогательными инструментами, при этом координаты вспомогательных инструментов в пространственно-неподвижной координатной системе непрерывно контролируются передатчиками в пространственно-неподвижной координатной системе. Функцию вспомогательных инструментов, используемых для этой цели, могут выполнять, например, используемые устройства позиционирования с числовым программным управлением, чье относительное местоположение в производственном цехе известно и/или контролируется в пространственно-неподвижной координатной системе. В случае обнаружения отклонения координат вспомогательного инструмента от его расчетных координат существуют два предпочтительных варианта, заслуживающих внимания:
a) восстановление местоположения вспомогательного инструмента в соответствии с его расчетными координатами;
b) расчет отклонения координат вспомогательного инструмента от его расчетных координат и вычисление поправочного коэффициента, который учитывает это отклонение, для текущих координат, зарегистрированных вспомогательным инструментом, и/или контрольных данных для этого вспомогательного инструмента.
Если пространственно-неподвижная координатная система сформирована с помощью полученных от спутников координатных данных, целесообразно, чтобы вспомогательные инструменты включали в себя чувствительные элементы для бесконтактной регистрации координат элементов и/или чувствительные элементы для регистрации, по меньшей мере, внешнего контура уже собранных групп элементов, которые формируют часть физической конструкции, при этом эти чувствительные элементы снабжены средствами для определения своих координат в пространственно-неподвижной координатной системе. Затем эти координатные данные могут быть использованы, например, для корректировки значений, измеренных отдельными чувствительными элементами.
Дальнейшая предпочтительная модификация изобретения заключается в том, что пространственно-неподвижная координатная система сформирована спутниковыми координатными данными, полученными, например, с помощью системы Galileo или GPS (Глобальная навигационная спутниковая система). Это особенно эффективно в том случае, когда пространственно-неподвижная координатная система используется в связи с проведением работ по техническому обслуживанию воздушного судна на открытом воздухе.
Дальнейшая предпочтительная модификация изобретения заключается в том, что пространственно-неподвижная координатная система сформирована с помощью лазера. Например, целесообразно, чтобы пространственно-неподвижная координатная система была сформирована несколькими лазерными лучами, имеющими вид веера, так называемыми лазерными веерами, которые излучаются отдельными передатчиками в пространственно-неподвижной координатной системе. Лазерные вееры от всех передатчиков образуют несколько пересечений, соответствующих координатам в пространственно-неподвижной координатной системе. Координаты отдельных элементов в уже собранных группах элементов и/или контрольных точек могут контролироваться или путем оптической регистрации лазерных координат, или отражения от элементов или контрольных точек, или, например, с помощью приемников, чувствительных к лазерному лучу и установленных в контрольных точках. В реализованной таким образом лазерной координатной системе координаты контрольных точек определяются путем измерения задержки времени для соответствующих передатчиков.
Дальнейшая предпочтительная модификация изобретения заключается в том, что относительное положение элементов или групп элементов, определяющее пространственную стабильность физической конструкции в пространственно-неподвижной координатной системе, регистрируется главным образом по отношению друг к другу. Поэтому, в принципе, можно ввести дополнительную координатную систему, которая берет начало из точки с абсолютными координатами первого элемента в пространственно-неподвижной координатной системе и может изменить свое положение в пространственно-неподвижной координатной системе вместе с элементом в процессе сборки, так что координаты отдельных элементов в дополнительной координатной системе остаются неизменными в случае изменения положения первого элемента в пространственно-неподвижной координатной системе. В таком случае в этой дополнительной координатной системе взаимосвязь между координатами отдельных элементов остается неизменной.
Дальнейшая предпочтительная модификация изобретения заключается в том, что абсолютное положение элементов или групп элементов, определяющее пространственную стабильность физической конструкции в пространственно-неподвижной координатной системе, регистрируется главным образом в пространственно-неподвижной координатной системе. Дальнейшая предпочтительная модификация изобретения предусматривает бесконтактную регистрацию, по меньшей мере, одной части внешнего контура, отражающей внешние обводы уже собранных и/или установленных в заданное положение элементов или групп элементов, а также предпочтительно элементов или групп элементов, добавляемых на соответствующем этапе работы, в дополнение или вместо регистрации координат отдельных элементов или групп элементов в пространственно-неподвижной координатной системе, для непрерывного контроля пространственной стабильности физической конструкции.
Краткое описание чертежей
Изобретение более подробно объясняется ниже, посредством варианта осуществления, со ссылкой на сопроводительные чертежи:
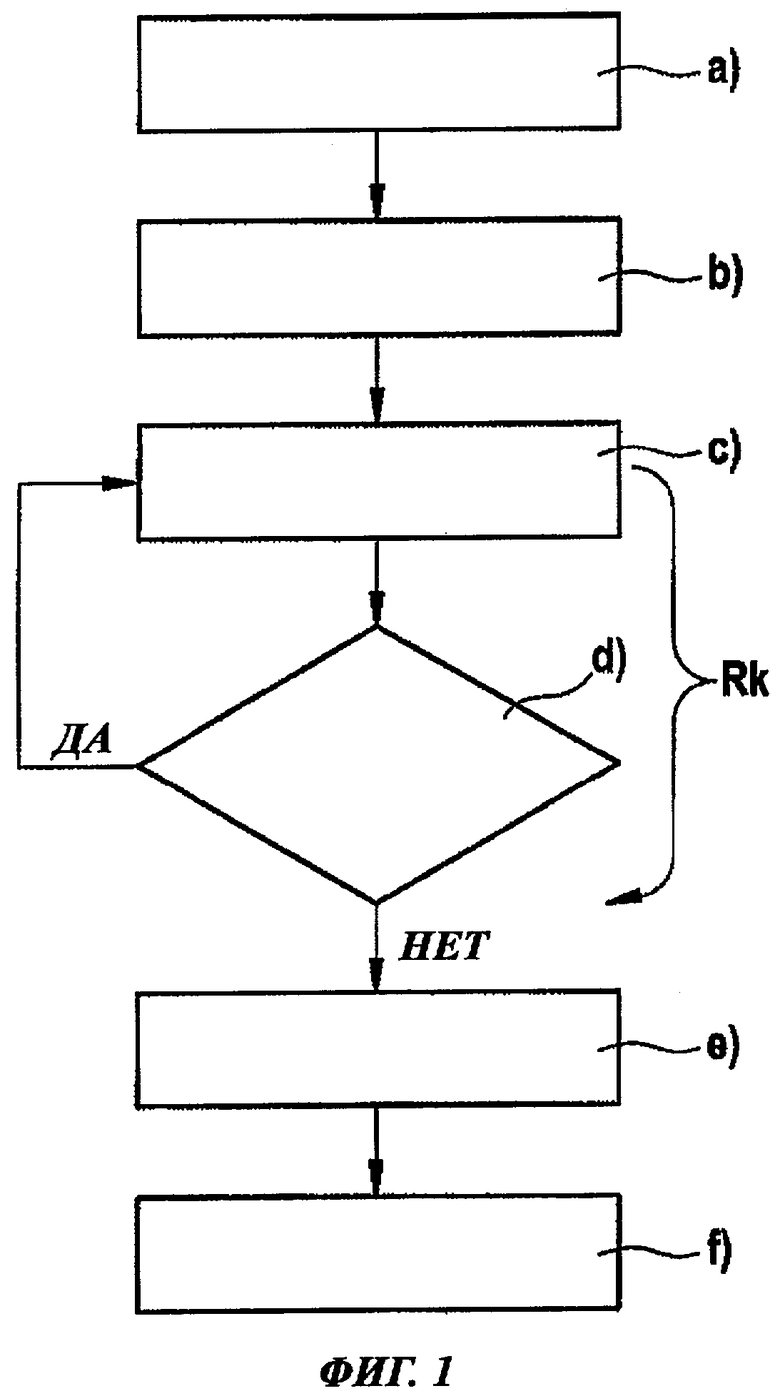
Фиг.1 показывает блок-схему, которая иллюстрирует алгоритм согласно одному варианту осуществления способа по изобретению.
Фиг.2 показывает схематическое изображение устройства для осуществления способа согласно изобретению по Фиг. 1.
Осуществление изобретения
Подготовительный этап, который не проиллюстрирован, заключается в том, что на участке, где из множества отдельных элементов будет производиться сборка физической конструкции в виде конструкции воздушного судна, формируется пространственно-неподвижная трехмерная координатная система, которая охватывает всю конструкцию воздушного судна.
Второй подготовительный этап, который также не проиллюстрирован, заключается в том, что на отдельные элементы перманентно наносятся контрольные точки (также известные как мишени) для непрерывной бесконтактной регистрации координат отдельных элементов в пределах созданной пространственно-неподвижной трехмерной координатной системы.
Основной способ, проиллюстрированный на Фиг.1, реализуется после двух подготовительных этапов.
На первом этапе а) основного способа выполняется следующее: снабженные мишенями элементы отмечаются или регистрируются, то есть определяется положение мишеней на отдельных элементах, характер элементов и положение элементов, предназначенных для сборки, на конструкции воздушного судна.
На втором этапе b) основного способа выполняется следующее: первый элемент вводится в область регистрации передатчиков, образующих пространственно-неподвижную трехмерную координатную систему. В этом случае определяется и/или задается в соответствии с уставкой положение, а также ориентация первого элемента в пространственно-неподвижной трехмерной координатной системе. Регистрация положения, а также ориентации первого элемента может быть выполнена, например, оптическими средствами, с помощью камер и подходящих алгоритмов обработки изображения. Однако можно также использовать только мишень для того, чтобы определить, например, текущие координаты отдельных мишеней в пространственно-неподвижной координатной системе, аналогично тому, как это делается в спутниковой навигационной системе, такой как GPS. Информация, полученная в процессе регистрации на этапе а), касающаяся характера, применения и размеров соответствующего элемента, и, если применимо, какого-либо идентификационного кода для мишеней, используется для определения расчетных координат соответствующего элемента в пространственно-неподвижной координатной системе, а также для определения отклонения от этих координат.
На третьем этапе с) основного способа выполняется следующее: устройства позиционирования с числовым программным управлением, которые обслуживают первый элемент, перемещают первый элемент в точное расчетное положение, соответствующее его месту во всей конструкции воздушного судна.
На четвертом этапе d) основного способа выполняется постоянная в течение всего процесса сборки проверка этого положения, так как оно может меняться, например, в результате температурных факторов.
Другими словами, на этапе d) основного способа повторно и циклически в течение всего процесса сборки осуществляется регистрация положения и ориентации первого элемента в пространственно-неподвижной трехмерной координатной системе.
В этом случае третий с) и четвертый d) этапы основного способа образуют контур управления RK, благодаря чему, в случае обнаружения изменения положения, например, из-за температурных факторов, первый элемент снова перемещается в свое точное номинальное (расчетное) положение.
Если фактическое положение первого элемента совпадает с его расчетным положением, тогда первый элемент стабилизируется на этапе е) основного способа.
На шестом этапе f) основного способа совпадение между расчетным положением и фактическим положением регистрируется и сохраняется для решения задач контроля качества.
Описанные выше этапы основного способа с а) по f) последовательно выполняют для каждого отдельного элемента и после этого циклически повторяют до тех пор, пока не будут установлены все элементы, образующие всю конструкцию воздушного судна, и она не будет собрана полностью.
В качестве примера, согласно данному варианту осуществления, способ может эффективно использоваться для сборки крупных конструкций воздушного судна. В принципе, способ может также использоваться в случае, когда планируется выполнять высокоточную подгонку относительно небольших конструкций воздушного судна или других конструкций, и этот процесс может растянуться на период от нескольких часов до нескольких дней.
Основанием для последовательной реализации способа и для получения связанных с ним преимуществ является внедрение в процесс производства достаточно точной трехмерной метрологии, с тем, чтобы можно было в любой момент отслеживать контрольные точки, имеющие отношение к оценке качества, и чтобы все контрольные точки были постоянно доступны в виде трехмерной координаты.
Для непрерывного наблюдения практически осуществимы следующие варианты:
a) наблюдение за точками, находящимися вблизи действующего технологического оборудования, и осуществление соответствующей корреляции между изменением в наблюдаемых точках и изменениями, обнаруженными в геометрических характеристиках фюзеляжа воздушного судна;
b) постоянное непосредственное геометрическое измерение соответствующих координат фюзеляжа воздушного судна и расчет величины поправки для любых обнаруженных изменений, при этом величина поправки передается в виде команды управления на устройства позиционирования с числовым программным управлением.
Способ обеспечивает поддержание пространственной стабильности собранной конструкции воздушного судна в любой момент в течение всего периода сборки конструкции воздушного судна из нескольких элементов, что известно как конечный результат процесса сборки. Более того, использование способа сразу после процесса сборки позволяет производить дальнейшую обработку фюзеляжа воздушного судна, поскольку контроль качества и проверка пространственной стабильности уже были произведены, и непрерывно регистрировались в течение процесса сборки. Кроме того, способ значительно снижает затраты на повторную обработку и уменьшает количество отходов, так как в течение процесса сборки пространственная стабильность всей конструкции воздушного судна подвергается постоянной проверке, и в случае необходимости корректируется.
Фиг.2 показывает схематическое изображение устройства для осуществления способа согласно изобретению по Фиг.1.
Пространственно-неподвижная координатная система 90, которая включает в себя конструкцию 30 воздушного судна, собираемого из нескольких элементов 31, 32, 33, образована главным передатчиком 10 и несколькими вспомогательными передатчиками 11, 12, 13. Вспомогательные передатчики 11, 12, 13 находятся в прямом визуальном контакте с главным передатчиком 10, который непрерывно отслеживает положение вспомогательных передатчиков 11, 12, 13, с тем, чтобы подать на центральный вычислительный узел 20 сигнал о любом возможном изменении положения вспомогательных передатчиков. Положение вспомогательных передатчиков, установленных позади конструкции 30 воздушного судна, может отслеживаться, например, посредством косвенного визуального контакта, путем установления соединения с вспомогательными передатчиками 11, 12, 13, находящимися в прямом визуальном контакте.
Конструкция 30 воздушного судна собирается из нескольких элементов 31, 32, 33. Для того чтобы можно было регистрировать положение и ориентацию отдельных элементов 31, 32, 33 в пространственно-неподвижной координатной системе 90, на элементах 31, 32, 33 устанавливаются мишени 40, которые регистрируются бесконтактным образом передатчиками 10, 11, 12, 13. Положение мишеней 40 в пространственно-неподвижной координатной системе 90 можно определить с помощью интерференции или путем измерения временной задержки, например, с применением лазерных лучей, испускаемых несколькими передатчиками 10, 11, 12, 13. Если известна взаимосвязь мишеней 40 и отдельных элементов 31, 32, 33, например, на основе корреляции совместного перемещения мишеней 40 по отношению друг к другу при введении соответствующих элементов 31, 32, 33 в пространственно-неподвижную координатную систему 90 и область регистрации передатчиков 10, 11, 12, 13 или путем учета или регистрации элементов 31, 32, 33, положение элементов 31, 32, 33 в пространственно-неподвижной координатной системе может быть рассчитано с помощью центрального вычислительного узла, с учетом положений мишеней 40.
Отдельные элементы 31, 32, 33 перемещаются в свое расчетное положение и принимают расчетную ориентацию с помощью устройств 50 позиционирования с числовым программным управлением, которые устанавливаются на регулируемых сборочных устройствах 51. В этом случае центральный вычислительный узел 20 управляет устройствами 50 позиционирования с ЧПУ.
В приведенном примере сборка конструкции 30 воздушного судна производится следующим образом.
Прежде всего, в координатную систему 90 и, соответственно, в зону регистрации передатчиков 10, 11, 12, 13 вводится первый элемент 31. В координатной системе 90 элемент 31 позиционируется и точно устанавливается с учетом предопределенного положения этого элемента 31 в конструкции 30 воздушного судна. Второй элемент 32, аналогичным образом введенный в координатную систему 90, позиционируется и точно устанавливается в абсолютных показателях или по отношению к первому элементу 31, так что два элемента 31, 32 обеспечивают пространственную стабильность той части конструкции воздушного судна, которая образована двумя этими элементами 31, 32. После этого два элемента 31, 32 жестко соединяются друг с другом.
После этого вводится третий элемент 33, который позиционируется и точно устанавливается по отношению к уже собранным элементам 31, 32 конструкции воздушного судна. Мишени 40 на уже собранных частях могут быть сгруппированы центральным вычислительным узлом 20, чтобы образовать новый элемент, состоящий из двух элементов 31, 32.
Любое нарушение пространственной стабильности выявляется во время сборки конструкции 30 воздушного судна, когда во время позиционирования и точной установки элемента 32 по отношению к той части конструкции 30 воздушного судна, которая была собрана из элементов 31, 32, обнаруживается, что их координаты в абсолютных показателях или по отношению друг к другу, выходят за пределы предопределенного максимально допустимого отклонения.
В принципе, практически можно создать пространственно-неподвижную координатную систему с помощью спутниковых координатных данных. В этом случае соответствующие спутники, которые находятся над линией горизонта и служат для определения координат, используются в качестве вспомогательных передатчиков, а, например, наземная станция спутниковой связи, чье местоположение известно, выступает в качестве главного передатчика для того, чтобы корректировать погрешность, связанную с временной задержкой и/или с неточностью определения координат по искусственным спутникам. В этом случае, например, мишени могут представлять собой приемники DGPS (дифференциальная GPS), которые закрепляются на элементах на период сборки конструкции воздушного судна и которые передают текущие координаты на центральный вычислительный узел.
Аналогичным образом, пространственно-неподвижная координатная система может быть образована, например, с использованием лазеров, когда трехмерная координатная сетка формируется локально, например, путем испускания лазерных лучей или вееров лазерных лучей из передатчиков в пространственно-неподвижной координатной системе, и в этой сетке могут быть определены, например, координаты контрольных точек. Аналогичным образом, практически осуществимо выполнение измерений временной задержки по лазерным лучам, отраженным от поверхности отдельных элементов. В качестве примера, для этой цели с помощью лазерных лучей от нескольких передатчиков определяются азимуты контрольных точек, и, например, обнаруживается рассеянное обратное излучение, и в этом случае время задержки для отдельных лазерных лучей может быть рассчитано путем соответствующей модуляции лазерного света.
Несмотря на то, что изобретение описано посредством предпочтительного варианта осуществления, оно не ограничивается этим описанием, а предполагает модифицирование самыми различными способами.
Несмотря на то, что объяснение настоящего изобретения было сделано применительно к конструкции воздушного судна, его применение не ограничивается производством конструкций воздушных судов. Например, способ согласно изобретению может быть использован для изготовления, в частности, крупноформатных легких конструкций в других областях техники, где также необходима очень высокая пространственная стабильность, например, в производстве несущих систем для космических полетов или для использования в море.
Список обозначений
10 Главный передатчик
11, 12, 13 Вспомогательные передатчики
20 Центральный вычислительный узел
30 Конструкция воздушного судна
31, 32, 33 Элемент
40 Мишень
50 Устройство позиционирования с числовым программным управлением
51 Регулируемое сборочное устройство
90 Пространственно-неподвижная координатная система
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| Способ определения функционального состояния пилота и система для его осуществления | 2017 |
|
RU2654765C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОТСЕКА ФЮЗЕЛЯЖА ВОЗДУШНОГО СУДНА | 2006 |
|
RU2418722C2 |
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ В ПРОСТРАНСТВЕ ЭЛЕМЕНТОВ СБОРНЫХ КОНСТРУКЦИЙ | 2020 |
|
RU2759013C1 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| СПОСОБ СБОРКИ МОДУЛЬНЫМ СПОСОБОМ КЕССОНА КОНСОЛИ КРЫЛА ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА С ДЕТАЛЯМИ ИЗ УГЛЕРОДНЫХ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И МЕТАЛЛОВ И СБОРОЧНАЯ ЛИНИЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА СБОРКИ | 2023 |
|
RU2836920C1 |
| Способ и устройство для направленного центрирования оправленных оптических линз и узлов | 1977 |
|
SU922673A1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
Изобретение относится к системам программного управления и может быть использовано для обеспечения пространственной стабильности многоэлементных конструкций, в частности конструкций воздушных судов в процессе сборки. Технический результат заключается в обеспечении поддержания пространственной стабильности собираемой конструкции в течение всего периода сборки. Способ включает этапы: создание пространственно-неподвижной трехмерной координатной системы, которая вмещает в себя собираемую впоследствии физическую конструкцию; введение нескольких элементов собираемой физической конструкции в пространственно-неподвижную трехмерную координатную систему; периодическая регистрация положения отдельных элементов и собранных групп элементов в пространственно-неподвижной трехмерной координатной системе в процессе сборки; и корректировка положения соответствующего элемента или соответствующей уже собранной группы элементов на соответствующую предопределенную расчетную величину, в случае, если координаты соответствующего элемента или соответствующей собранной группы элементов находятся вне поля допуска, которое предопределяется в соответствии с требуемой пространственной стабильностью. 2 н. и 8 з.п. ф-лы, 2 ил.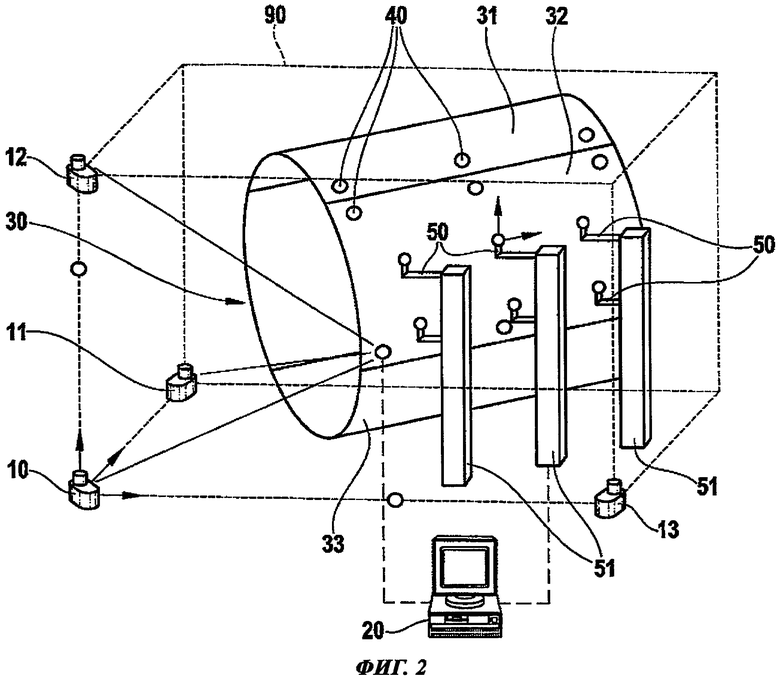
1. Способ обеспечения пространственной стабильности многоэлементных физических конструкций, в частности конструкций воздушных судов в процессе сборки, включающий в себя следующие этапы:
формирование пространственно-неподвижной трехмерной координатной системы (90), которая вмещает в себя собираемую впоследствии физическую конструкцию;
введение множества элементов (31, 32, 33) собираемой физической конструкции в пространственно-неподвижную трехмерную координатную систему (90);
периодическая регистрация положений отдельных элементов (31, 32, 33) и собранных групп элементов (31, 32, 33) в пространственно-неподвижной трехмерной координатной системе (90) в процессе сборки; и
корректировка положения соответствующего элемента (31, 32, 33) или соответствующей собранной группы элементов (31, 32, 33) на соответствующую предопределенную номинальную величину, если соответствующая регистрационная запись указывает на положение соответствующего элемента (31, 32, 33) или соответствующей собранной группы элементов (31, 32, 33) вне поля допуска, предопределенного в соответствии с требуемой пространственной стабильностью, при этом пространственно-неподвижную координатную систему (90) формируют с помощью главного передатчика (10) и множества вспомогательных передатчиков (11, 12, 13), причем положения вспомогательных передатчиков (11, 12, 13) отслеживают посредством главного передатчика (10), а измеренные значения, полученные от вспомогательных передатчиков (11, 12, 13), корректируют в случае их отклонения от предварительно заданных номинальных значений.
2. Способ по п.1, отличающийся тем, что для регистрации положений закрепляют контрольные точки (40) на отдельных элементах (31, 32, 33) и регистрируют их положения, причем положения корректируют путем корректировки положений контрольных точек (40).
3. Способ по п.1, отличающийся тем, что положения главного передатчика (10) и вспомогательных передатчиков (11, 12, 13) регистрируют бесконтактным образом.
4. Способ по п.1, отличающийся тем, что непрерывно отслеживают положения вспомогательных инструментов (50) в пространственно-неподвижной координатной системе (90).
5. Способ по п.1, отличающийся тем, что пространственно-неподвижную координатную систему (90) формируют с помощью координатных данных от искусственных спутников.
6. Способ по п.1, отличающийся тем, что пространственно-неподвижную координатную систему (90) формируют с помощью координатных данных, полученных с помощью лазера.
7. Способ по п.1, отличающийся тем, что регистрируют положения элементов (31, 32, 33) по отношению друг к другу в пространственно-неподвижной координатной системе (90).
8. Способ по п.1, отличающийся тем, что регистрируют абсолютное положение элементов (31, 32, 33) в пространственно-неподвижной координатной системе (90).
9. Способ по п.1, отличающийся тем, что регистрируют внешний контур элементов (31, 32, 33) или групп элементов для регистрации положений.
10. Устройство для обеспечения пространственной стабильности многоэлементных физических конструкций, в частности конструкций воздушных судов в процессе сборки, содержащее:
устройство для формирования пространственно-неподвижной трехмерной координатной системы (90), которая вмещает в себя собираемую впоследствии физическую конструкцию;
устройство для введения множества элементов (31, 32, 33) собираемой физической конструкции в пространственно-неподвижную трехмерную координатную систему (90);
регистрирующее устройство для регистрации положений отдельных элементов (31, 32, 33) и собранных групп элементов (31, 32, 33) в пространственно-неподвижной трехмерной координатной системе (90) в процессе сборки; и
устройство для корректировки положения соответствующего элемента (31, 32, 33) или соответствующей собранной группы элементов (31, 32, 33) на соответствующую предопределенную номинальную величину в ответ на сигнал регистрирующего устройства, указывающий на положение соответствующего элемента (31, 32, 33) или соответствующей собранной группы элементов (31, 32, 33) вне поля допуска, предопределенного в соответствии с требуемой пространственной стабильностью, при этом пространственно-неподвижная координатная система (90) сформирована с помощью главного передатчика (10) и множества вспомогательных передатчиков (11, 12, 13) и выполнена с возможностью отслеживания положения вспомогательных передатчиков (11, 12, 13) посредством главного передатчика (10) и корректировки измеренных значений, полученных от вспомогательных передатчиков (11, 12, 13), в случае их отклонения от предварительно заданных номинальных значений.
| Способ определения показателя преломления объекта из оптически прозрачного материала | 1986 |
|
SU1345099A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| DD 292520 A5, 01.08.1991 | |||
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |

