Изобретение относится к области землеройно-транспортных и дорожно-строительных машин и предназначено для систем контроля и управления положением отвала автогрейдера
Известен способ определения положения режущей кромки отвала автогрейдера, согласно которому положение режущей кромки отвала однозначно определяется по известным текущим значениям длин гидроцилиндров устройств подвеса и выноса (УПВ) отвала автогрейдера L1, L2, L3 [В.А.Палеев, С.Ю.Тимаков, А.В.Палеев / Кинематические характеристики устройств подвеса и выноса отвала автогрейдера // Строительные и дорожные машины 2009, №5, с.47-51].
Недостатком данного способа является невозможность определения положения режущей кромки отвала автогрейдера в системе координат, связанной с окружающей местностью. В связи с этим нельзя определить координаты высотных отметок и углы наклона поверхностей, обрабатываемых автогрейдером.
Известен также способ определения положения режущей кромки отвала автогрейдера относительно горизонта, включающий датчик углового положения, установленный на основной раме автогрейдера и шарнирно-сочлененную рычажную систему, связанную с датчиком угла наклона (поворота) тяговой рамы с отвалом автогрейдера [В.С.Щербаков, В.Ф.Раац, В.Е.Калугин, А.А.Макавеев / Система автоматической стабилизации поперечного наклона рабочего органа автогрейдера // А.с. 1481344 (СССР), опубл. 23.05.89 БИ №19].
Недостатком данного способа является невозможность определения высотных отметок режущей кромки отвала автогрейдера и, соответственно, высотных отметок обрабатываемой поверхности.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому объекту является способ определения режущей кромки отвала автогрейдера, при котором на отвал устанавливаются вертикальные штанги с антеннами спутниковых систем навигации GPS/Глонасс. [С.В.Знобищев, И.А.Мастиков / Системы нивелирования для автогрейдеров // Строительные и дорожные машины, 2008, №5, с.13-18].
Недостатком такого способа является сокращение числа операций, выполняемых автогрейдером, из-за того, что отвал загроможден несвойственными ему предметами - кронштейнами, штангами, проводами антенн, которые ограничивают перемещения отвала и могут быть повреждены или разрушены при работе автогрейдера, т.к. отвал может поворачиваться в плане на угол до 360°, смещаться по направляющим влево и вправо, изменять положение относительно горизонта от 0° до 90° (при использовании систем выноса тяговой рамы с отвалом автогрейдера). Очевидно, что установка на отвал автогрейдера антенн систем спутниковой навигации GPS/Глонасс резко ограничивает или снижает функциональные возможности автогрейдера.
Задачей изобретения является разработка способа, освобождающего отвал автогрейдера от антенн спутниковых и иных навигационных систем, и обеспечивающего при этом в любой произвольный момент времени точное определение положения режущей кромки отвала автогрейдера и, соответственно, текущее значение высотных отметок и углов наклона поверхности, обрабатываемой автогрейдером в системе координат, связанной с окружающей местностью. Данная информация необходима для подачи системой управления отвалом (в случае необходимости) управляющих воздействий, обеспечивающих обработку поверхности в соответствии с проектом.
Указанный технический результат достигается тем, что с помощью датчиков перемещения постоянно определяют величину выдвижения штоков гидроцилиндров устройства подвеса тяговой рамы, информация от датчиков перемещения поступает в счетно-решающее устройство, в котором по заданному алгоритму определяют координаты точек режущей кромки отвала автогрейдера в системе координат, связанной с автогрейдером, одновременно, с помощью системы спутниковой навигации и антенн, жестко установленных на основной раме автогрейдера, определяют положение автогрейдера и связанной с ним системы координат в системе координат, связанной с местностью, затем, с помощью счетно-решающего устройства, координаты точек на режущей кромке отвала автогрейдера определяют в системе координат, связанной с местностью.
Условием осуществления указанных действий является оснащение автогрейдера системой спутниковой навигации, счетно-решающим устройством с заданным алгоритмом расчета, а также датчиками перемещения штоков гидроцилиндров устройства подвеса тяговой рамы автогрейдера.
Сущность изобретения поясняется нижеследующим описанием и прилагаемым чертежом, где приведено одно из возможных устройств, реализующих предлагаемый способ.
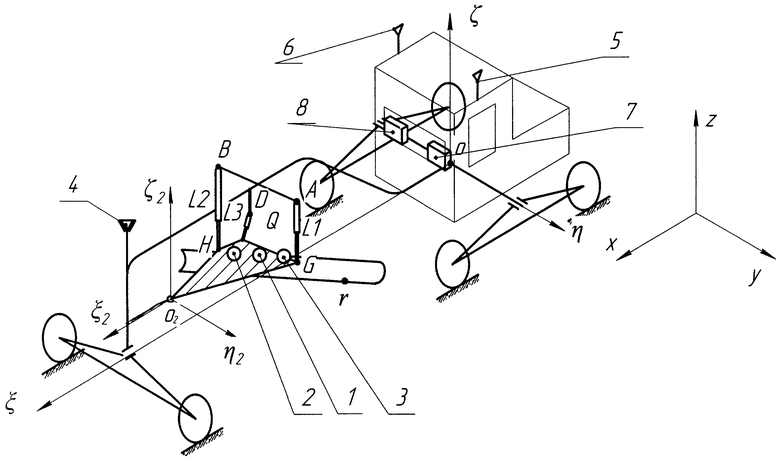
На чертеже изображены: XYZ - система координат Земли, связанная с окружающей местностью, Oξηζ - система координат, связанная с автогрейдером, О2ξ2η2ζ2 - локальная система координат тяговой рамы автогрейдера, L1, L2, L3 - гидроцилиндры устройства подвеса тяговой рамы с отвалом автогрейдера с датчиками длины, 1 - датчик угла поворота отвала в плане, 2 - датчик изменения угла резания отвала, 3 - датчик выдвижения отвала по направляющим влево или вправо, 4, 5, 6 - антенны систем спутниковой навигации GPS/Глонасс, 7 - счетно-решающее устройство, 8 - блок индикации и управления.
Антенны спутниковой системы навигации, жестко установленные на основной раме автогрейдера, должны быть максимально удалены друг от друга для снижения погрешности выполняемых вычислений. Для определения положения автогрейдера достаточно знать координаты начала связанной с автогрейдером системы координат и углы поворота ее - рыскания, тангажа и крена.
Координаты любой точки (r) на режущей кромке отвала автогрейдера в системе координат, связанной с местностью, определяются уравнением
где Xr, Yr, Zr - координаты точки на режущей кромке отвала автогрейдера в системе координат XYZ, связанной с местностью, Хо, Yo, Zo - координаты начала связанной с автогрейдером системы Oξηζ в системе координат XYZ, ξr, ηr, ζr - координаты точки на режущей кромке отвала в системе координат автогрейдера Oξηζ, Матр - матрица преобразования координат, учитывающая углы поворота автогрейдера (рыскания, тангажа и крена) в связанной с местностью системе координат XYZ.
Полное уравнение для расчета координат точек на режущей кромке отвала автогрейдера в системе координат XYZ, связанной с местностью, имеет вид
где ξo2, ηо2, ζo2 - координаты начала O2 связанной с тяговой рамой локальной системы координат О2ξ2η2ζ2 в системе координат автогрейдера Oξηζ, ξ2r, η2r, ζ2r - координаты точки на режущей кромке отвала в локальной системе координат тяговой рамы O2ξ2 η2 ζ2, Матр2 - матрица преобразования координат, учитывающая углы поворота тяговой рамы (рыскания, тангажа и крена) в системе координат автогрейдера Oξηζ.
Заявленный способ заключается в следующем: координаты точек на режущей кромке отвала (например, точки r) определяют счетно-решающим устройством в локальной системе координат тяговой рамы О2ξ2η2ζ2 с использованием данных датчиков 1, 2, 3 и информации о постоянных размерах тяговой рамы и отвала. В итоге получаем координаты точки r (ξ2r, η2r, ζ2r) в локальной системе координат тяговой рамы O2ξ2η2ζ2. На следующем этапе с помощью данных датчиков длин гидроцилиндров L1, L2, L3 счетно-решающим устройством определяют углы рыскания, тангажа и крена тяговой рамы φ2, ψ2, θ2 в системе координат автогрейдера Oξηζ, формируется матрица преобразования координат Матр2. На этом этапе становится возможным расчет координат точек на режущей кромке отвала в системе координат автогрейдера.
где ξr, ηr, ζr - координаты точки r на режущей кромке отвала в системе координат автогрейдера.
С помощью спутниковой системы навигации GPS или Глонасс определяют пространственные координаты антенн 4, 5, 6, жестко связанных с основной рамой автогрейдера в неподвижной системе координат XYZ, связанной с Землей. Эти данные поступают в счетно-решающее устройство 7, в котором рассчитывают углы рыскания, тангажа и крена φ, ψ, θ и координаты начала связанной с автогрейдером системы координат Oξηζ в неподвижной системе координат XYZ, связанной с Землей.
С помощью уравнения (2) счетно-решающее устройство определяет координаты точек на режущей кромке отвала и сравнивает их с требуемыми значениями высотных отметок обрабатываемой поверхности.
Результаты расчета и сравнения поступают в блок информации и управления 8. В случае отклонения режущей кромки отвала от проектного положения управляющее воздействие на гидроцилиндры подвеса тяговой рамы L1, L2, L3 в ручном режиме подается оператором автогрейдера, в автоматическом - блоком информации и управления.
Использование новых операций и устройств - антенн спутниковой навигации, жестко установленных на основной раме автогрейдера, счетно-решающего устройства, блока информации и управления, датчиков выдвижения штоков гидроцилиндров устройства подвеса тяговой рамы позволяет освободить отвал автогрейдера от штанг и проводов антенн спутниковых систем навигации, одновременно позволяет точно определять величину отклонения режущей кромки отвала автогрейдера от проектных отметок и использовать данную информацию для управления отвалом автогрейдера в ручном или автоматическом режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЕЖУЩЕЙ КРОМКИ ОТВАЛА АВТОГРЕЙДЕРА | 2011 |
|
RU2478757C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| Гидропривод рабочего органа автогрейдера | 1982 |
|
SU1033661A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| Способ автоматического контроля качества уплотнения балластного слоя рельсового пути и устройство для его осуществления | 2018 |
|
RU2703819C1 |
| Способ определения элементов внешнего ориентирования снимка по изображениям летательных аппаратов | 2022 |
|
RU2789986C1 |
Изобретение относится к землеройно-транспортной и дорожно-строительной технике, в частности к способу контроля положения отвала автогрейдера. Способ определения положения режущей кромки отвала автогрейдера осуществляют с использованием систем спутниковой навигации. При этом с помощью датчиков перемещения постоянно определяют величину выдвижения штоков гидроцилиндров устройства подвеса тяговой рамы. Информация от датчиков перемещения поступает в счетно-решающее устройство, в котором по заданному алгоритму определяют координаты точек режущей кромки отвала автогрейдера в системе координат, связанной с автогрейдером. Одновременно с помощью системы спутниковой навигации и антенн, жестко установленных на основной раме автогрейдера, определяют положение автогрейдера и координаты начала связанной с ним системы координат в системе координат, связанной с местностью. Затем с помощью счетно-решающего устройства определяют координаты точек на режущей кромке отвала автогрейдера в системе координат, связанной с местностью. Предложенный способ обеспечивает в любой произвольный момент времени точное определение положения режущей кромки отвала автогрейдера и текущее значение высотных отметок и углов наклона обрабатываемой поверхности в системе координат, связанной с окружающей местностью. 1 ил.
Способ определения положения режущей кромки отвала автогрейдера, использующий системы спутниковой навигации, антенны систем спутниковой навигации, установленные на автогрейдере, отличающийся тем, что с помощью датчиков перемещения постоянно определяют величину выдвижения штоков гидроцилиндров устройства подвеса тяговой рамы, информация от датчиков перемещения поступает в счетно-решающее устройство, в котором по заданному алгоритму определяют координаты точек режущей кромки отвала автогрейдера в системе координат, связанной с автогрейдером, одновременно, с помощью системы спутниковой навигации и антенн, жестко установленных на основной раме автогрейдера, определяют положение автогрейдера и связанной с ним системы координат в системе координат, связанной с местностью, затем, с помощью счетно-решающего устройства, координаты точек на режущей кромке отвала автогрейдера определяют в системе координат, связанной с местностью.
| ЗНОБИЩЕВ С.В., МАСТИКОВ И.А | |||
| Системы нивелирования для автогрейдеров, Строительные и дорожные машины, №5, 2008, с.13-18 | |||
| Планировщик | 1974 |
|
SU611983A1 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| Система автоматической стабилизации поперечного наклона рабочего органа автогрейдера | 1986 |
|
SU1481344A1 |
| АВТОГРЕЙДЕР | 1995 |
|
RU2109110C1 |
| US 4067395 А, 10.01.1978 | |||
| СЫРЬЕВАЯ СМЕСЬ | 2006 |
|
RU2313507C1 |
| CN 101117809 А, 06.02.2008. | |||

