Изобретение относится к области робототехники, а именно к захватным устройствам, и к медицинской технике - к искусственным кистям (управляемым протезам кистей рук). Может использоваться в конструкциях манипуляторов промышленных роботов, а также в конструкциях роботов различного назначения, или как протез кисти руки при установке необходимой системы очувствления и обратной связи.
Из уровня техники известна механическая кисть, содержащая основание, искусственные пальцы, образованные шарнирно соединенными пустотелыми звеньями, тросы для сжимания искусственных пальцев в кулак и возвратные пружинки для выпрямления искусственных пальцев (Патент RU №2245120, А61F 2/56, 2002).
Недостатком известного устройства является его низкая функциональность, вследствие малого количество степеней подвижностей, отсутствия управляемого независимого движения звеньев относительно друг друга и относительно основания, а также поддерживание тросов в натянутом состоянии для обеспечения фиксации звеньев в заданном положении.
Наиболее близким решением по технической сути и достигаемому результату является устройство для захватывания материальных объектов, включающее основание с приводом и систему конструктивно идентичных последовательно связанных между собой звеньев с поворотными валами, при этом они соединены с возможностью независимого поворота относительно друг друга, а начальное звено закреплено на основании с возможностью поворота относительно него, а также тросоприводные средства звеньев, соединенные с приводами на основании, и возвратные пружинки для разжимания пальцев (Патент GB №2386886, B25J 15/00, A61F 2/58, 2002).
Недостатком известного устройства является наличие большого количество приводов, предназначенных для поворота звеньев, и невозможность силового управления движениями звеньев при их разгибании, поддерживание тросов в натянутом состоянии для обеспечения нахождения звеньев в заданном положении.
В основу заявленного устройства был положен следующий технический результат - создание устройства, конструкция которого позволит расширить его функциональные возможности посредством сохранения кинематической избыточности устройства при упрощении его системы управления за счет уменьшения количества приводов.
Поставленный технический результат решается посредством того, что в захватном устройстве, включающем основание с приводом, систему конструктивно идентичных, последовательно связанных между собой, звеньев с поворотными валами и тросоприводное средство звеньев, соединенное с приводом основания, при этом звенья связаны между собой с возможностью независимого поворота, причем начальное звено закреплено на основании с возможностью поворота относительно него, согласно изобретению, каждое звено снабжено шкивом, цилиндрическими опорными элементами, средством фиксации и средством передачи ему управляемого независимого вращения, выполненными в виде электромагнитных муфт, установленных на поворотном валу, при этом тросоприводное средство звеньев выполнено замкнутым и установлено в виде «восьмерки» с натягом и охватом цилиндрических опорных элементов и шкива каждого звена.
Изобретение поясняется графическими материалами, где на
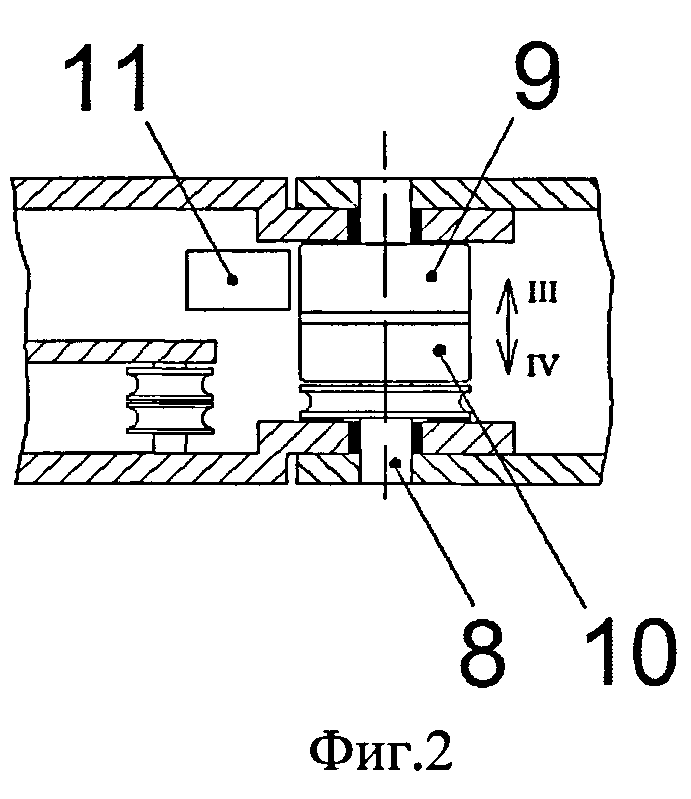
фиг.1 изображена общая схема устройства для захватывания материальных объектов;
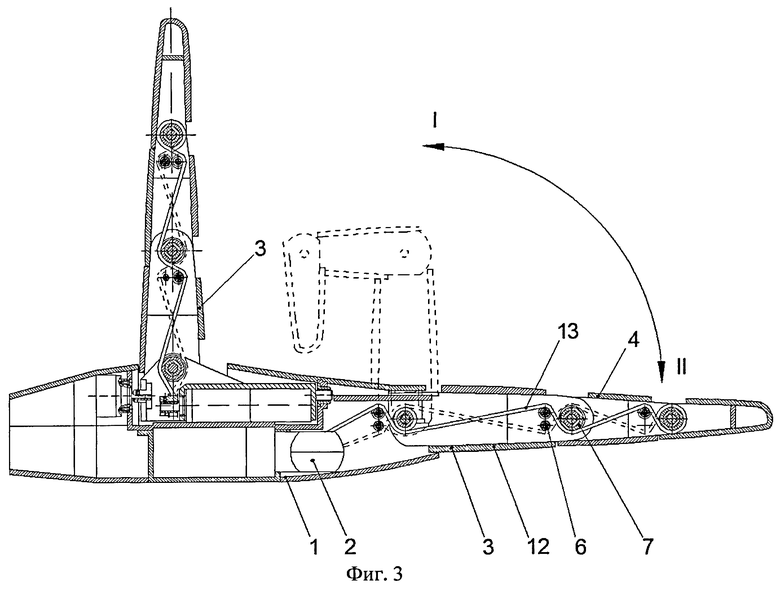
фиг.2 изображена общая схема узла сочленения звеньев;
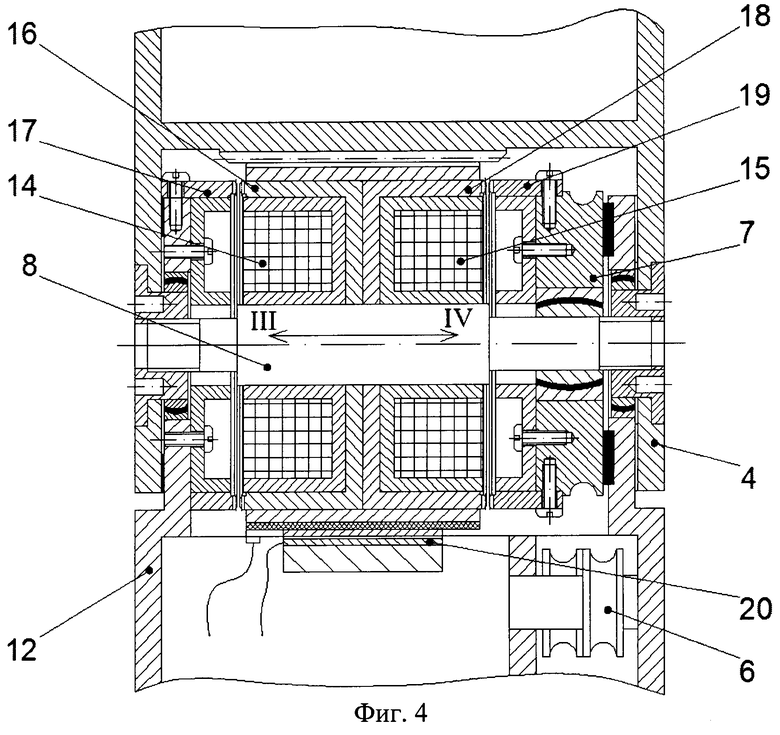
фиг.3 изображен пример устройства для захватывания материальных объектов в виде антропоморфного захватного устройства;
фиг.4 изображен узел сочленения звеньев антропоморфного захватного устройства.
На основании 1, закреплен привод, представляющий собой электродвигатель 2, плоский многозвенный исполнительный механизм 3, образованный шарнирно соединенными звеньями 4 и соединенный тросоприводным средством 5 звеньев 4, который протянут внутри звеньев 4 через систему 6 цилиндрических опорных элементов и шкивов 7, для управляемого независимого вращения звеньев 4. Звенья 4 выполнены с возможностью управляемого поворота в одном направлении I и управляемого возврата в начальное разомкнутое положение II (фиг.1). Каждое звено 4 вращается вместе с жестко закрепленным на нем поворотным валом 8 (фиг.2). В каждом звене 4 на поворотном валу 8 закреплены средство 9 фиксации и средство 10 передачи управляемого независимого вращения звену с возможностью их смещения вдоль поворотного вала 8 в направлениях III и IV. На каждом звене 4 установлен датчик 11 угла поворота.
Каждое звено плоского многозвенного исполнительного механизма устройства для захватывания материальных объектов работает следующим образом.
В начале рабочего цикла звено 4 плоского многозвенного исполнительного механизма 3 находится в начальном разомкнутом положении II. Средство 10 передачи управляемого независимого вращения звену и средство 9 фиксации отключены. Устройство для захватывания материальных объектов перемещается к объекту захватывания, и на определенном расстоянии от него средства 9 фиксации стопорит звено 4. Электродвигатель 2 приводит во вращение тросоприводное средство 5 звеньев 4. Для перемещения звена 4 на заданный угол средство 10 передачи управляемого независимого вращения звену входит в зацепление со шкивом 7. Средство 9 фиксации выходит из зацепления с корпусом 12 предыдущего звена, тем самым передавая вращательное движение звену 4. При достижении заданного угла поворота, средство 9 фиксации стопорит звено 4. Вращение звена 4 останавливается, средство 10 передачи управляемого независимого вращения звену выходит из зацепления со шкивом 7, перестает вращаться тросоприводное средство 5 звеньев 4.
Пример исполнения устройства для захватывания материальных объектов можно рассмотреть в виде антропоморфного захватного устройства.
На основании 1, закреплен электродвигатель 2, пять плоских многозвенных исполнительных механизмов 3, образованные шарнирно соединенными звеньями 4 и тросоприводные средства 5 звеньев 4, представляющие собой замкнутые тросы 13, которые протянуты внутри звеньев 4 через систему 6 цилиндрических опорных элементов и шкивов 7, для управляемого независимого перемещения звеньев 4. Звенья 4 выполнены с возможностью управляемого поворота в одном направлении I и управляемого возврата в начальное разомкнутое положение II (фиг.3). Каждое звено 4 вращается вместе с жестко закрепленным на нем поворотным валом 8 (фиг.4). В каждом звене 4 электромагнитная муфта 14 работает как средство 9 фиксации в заданном положении, вторая электромагнитная муфта 15 работает как средство 10 передачи управляемого независимого вращения звену. Средство 9 фиксации и средство 10 передачи управляемого независимого вращения звену закреплены на поворотных валах 8 с возможностью их продольного смещения в направлениях III и IV. На средстве 9 фиксации закреплена зубчатая коронка 16, на корпусе 12 предыдущего звена закреплена зубчатая коронка 17, на средстве 10 передачи управляемого независимого вращения звену закреплена зубчатая коронка 18, на шкиве 7 закреплена зубчатая коронка 19, а на корпусе средства 10 передачи управляемого независимого вращения звену установлен резистивный датчик 20 угла поворота.
Все звенья каждого плоского многозвенного исполнительного механизма антропоморфного захватного устройства работают следующим образом.
В начале рабочего цикла звено 4 плоского многозвенного исполнительного механизма 3 находится в начальном разомкнутом положении II. Средство 10 передачи управляемого независимого вращения звену и средство 9 фиксации отключены. Антропоморфное захватное устройство перемещается к объекту захватывания, и на определенном расстоянии от него зубчатая коронка 16 средства 9 фиксации входит в зацепление с зубчатой коронкой 17 и стопорит звено 4 относительно корпуса 12 предыдущего звена. Электродвигатель 2 приводит во вращение замкнутый трос 13. Вместе с ним начинает вращаться шкив 7 и закрепленная на нем зубчатая коронка 19. Для перемещения звена 4 на заданный угол средство 10 передачи управляемого независимого вращения звену вводит в зацепление установленную на нем зубчатую коронку 18 с зубчатой коронкой 19. Средство 9 фиксации выводит из зацепления зубчатые коронки 16 и 17, тем самым передавая вращение звену 4. При достижении заданного угла поворота, зубчатая коронка 16 входит в зацепление с зубчатой коронкой 17. Вращение звена 4 останавливается, средство 10 передачи управляемого независимого вращения звену выходит из зацепления со шкивом 7, отключается электродвигатель 2, перестает вращаться замкнутый трос 13.
Таким образом, заявленное изобретение позволяет, сохранив свойственные прототипу преимущества, среди которых присутствует и кинематическая избыточность, уменьшить количество тяговых приводов за счет возможности использования пушпульных муфт и цилиндрических опор для тяговых тросов.
Анализ заявленного технического решения на соответствие условиям патентоспособности показал, что указанные в независимом пункте формулы признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности неизвестной на дату приоритета из уровня техники необходимых признаков и достаточной для получения требуемого технического результата.
Свойства, регламентированные в заявленном соединении отдельными признаками, широко известны из уровня техники и не требуют дополнительных пояснений.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
- объект, воплощающий заявленное техническое решение, при его осуществлении предназначен для использования в робототехнической области промышленности и может быть реализован в качестве антропоморфного захватного устройства, применяемого в работе с хрупкими и упругодеформируемыми объектами;
- для заявленного объекта в том виде, как он охарактеризован в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в материалах заявки известных из уровня техники на дату приоритета средств и методов;
- объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленный объект соответствуют требованиям условиям патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| УНИВЕРСАЛЬНЫЙ ВСЕНАПРАВЛЕННЫЙ ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА | 2022 |
|
RU2804563C1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| ПРОТЕЗНОЕ УСТРОЙСТВО | 2016 |
|
RU2735674C2 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
Изобретение относится к области робототехники, а именно к захватным устройствам, используемым в конструкциях манипуляторов промышленных роботов, а также к медицинской технике - к искусственным кистям, управляемым протезам кистей рук. Захватное устройство содержит основание 1 с приводом, систему конструктивно идентичных, последовательно связанных между собой звеньев 4 с поворотными валами и тросоприводное средство 5 звеньев, соединенное с приводом основания. При этом звенья 4 связаны между собой с возможностью независимого поворота, причем начальное звено закреплено на основании 1 с возможностью поворота относительно него. Каждое звено 4 снабжено шкивом 7, цилиндрическими опорными элементами 6, средством фиксации и средством передачи ему управляемого независимого вращения, выполненными в виде электромагнитных муфт, установленных на поворотном валу. Тросоприводное средство 5 звеньев выполнено замкнутым и установлено в виде «восьмерки» с натягом и охватом цилиндрических опорных элементов 6 и шкива 7 каждого звена. Заявленное изобретение позволяет уменьшить количество тяговых приводов за счет возможности использования пушпульных муфт и цилиндрических опор для тяговых тросов. 4 ил.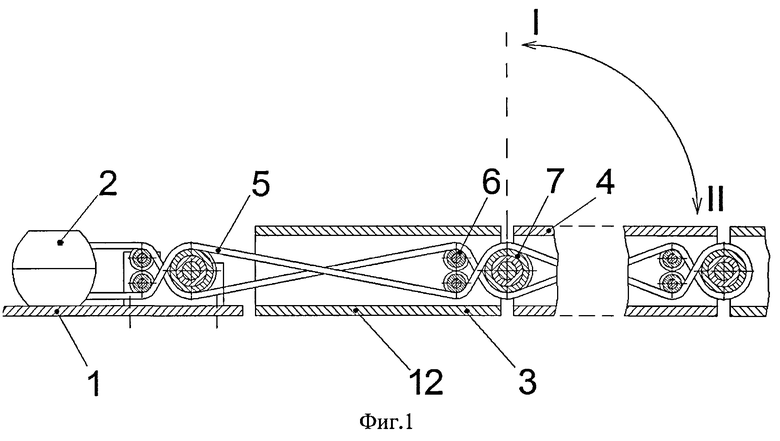
Захватное устройство, включающее основание с приводом, систему конструктивно идентичных последовательно связанных между собой звеньев с поворотными валами и тросоприводное средство звеньев, соединенное с приводом основания, при этом звенья связаны между собой с возможностью независимого поворота, причем начальное звено закреплено на основании с возможностью поворота относительно него, отличающееся тем, что каждое звено снабжено шкивом, цилиндрическими опорными элементами, средством фиксации и средством передачи ему управляемого независимого вращения, выполненными в виде электромагнитных муфт, установленных на поворотном валу, при этом тросоприводное средство звеньев выполнено замкнутым и установлено в виде «восьмерки» с натягом и охватом цилиндрических опорных элементов и шкива каждого звена.
| СПОСОБ ГЕРМЕТИЗАЦИИ РЕЗЬБОВОГО СОЕДИНЕНИЯ ДЛЯ ТРУБ И ЕГО УСТРОЙСТВО | 2008 |
|
RU2386886C1 |
| МЕХАНИЧЕСКАЯ КИСТЬ | 2002 |
|
RU2245120C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| Манипулятор,ориентируемый в пространстве вручную,В.М.Бурундукова | 1985 |
|
SU1283078A1 |

